一、选择题
选择题总共5个,每个3分。整体来说不难,主要是一些计算机视觉的基础题,但是如果看过时间太久了可能就忘记了,考前复习很有必要呀,我是没戏了。
1、图像边缘检测的卷积核是什么样的形式?
2、图像去噪滤波的方式有哪些?
3、哪些排序算法的时间复杂度为 ?
4、影响相机内参的因素有哪些?
5、【不记得了】
二、填空题
填空题总共9个,每个5分。填空题我个人感觉就有点难了,可能是面向不同人的题吧,面还是比较广的,问题基本上都见过,在论文、博客什么的都研究过也看过,但是直接在笔试的时候凭脑子写,好吧我认输,自己还是太菜。。。只有几个题还会写一点。
1、计算空间中点到直线的距离。
我想了想应该是用叉积就可以了:直线 是过零点,其方向向量表示为: ,点就是空间一点 ,将其表示为起于零点的向量 ,则点 到直线 的距离表示为 。
2、正态分布相关问题。
设 来自于总体 的样本,则
解答: ,则
3、图像识别中的几种特征描述子。
这个问题是很简单的,只要看过几篇论文,几篇博客就知道了,而且确实很多。
斑点检测类:DOG , LOG , SIFT , SURF;
焦点检测类:Harris , FAST ;
二进制类:BRIEF , BRISK , ORB .等等,这类比较多,随便写。
- 顺便说一下三维的,也方便自己记忆
三位识别方面的描述子主要分为局部特征描述子和全局特征描述子。
局部特征描述子:
- PFH (Point Feature Histogram) (点特征直方图)
- FPFH (Fast Point Feature Histogram) (快速点特征直方图) ,
- RSD (Radius-Based Surface Descriptor) (半径表面描述子) ,
- 3DSC (3D Shape Context) (3D形状上下文) ,
- USC (Unique Shape Context) (唯一形状上下文) ,
- SHOT (Signatures of Histogram Orientations) (方向签名直方图) ,
- Spin Image (旋转图) ,
- RIFT (Rotation-Invariant Feature Transform) (旋转不变特征变化) ,
- NARF (Normal Aligned Radial Feature) (法线对齐半径特征);
- RoPS (Rotation Projection Statistics) (旋转投影统计)
全局特征描述子:
- VFH (Point Feature Histogram) (点特征直方图)
- CVFH (Fast Point Feature Histogram) (快速点特征直方图) ,
- OUR-CVFH (Radius-Based Surface Descriptor) (基于半径的表面描述子) ,
- ESH (3D Shape Context) (3D形状上下文) ,
- GFPFH (Global Fast Point Feature Histogram) (全局快速点特征直方图)
- GRSD (Global Radius-Surface Descriptor) (全局半径表面描述子)
表格表示
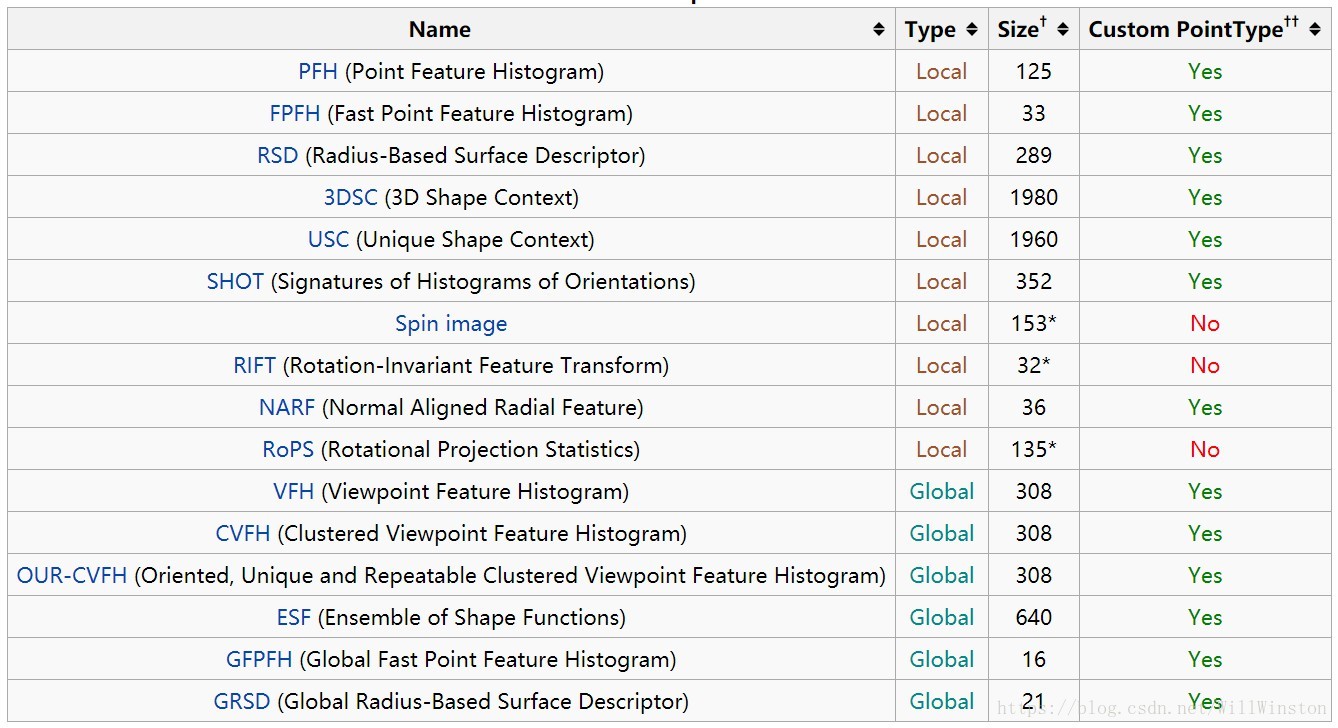
注:
+标有星号(*)的值表示描述符的大小取决于某些参数,给定的值是默认值。
++没有星号(*)的是自定义PointType的描述符,使用通用的“pcl :: Histogram <>”类型。
4、相机M1坐标系到相机M2坐标系的变换。
5、旋转矩阵的几种表示方式
题目给出了3X3的旋转矩阵(Rotation Matrix)形式,
其他的还有:EA : 欧拉角(Euler Angle),
RV : 旋转向量(Rotation Vector),
AA : 轴角(Axis-Angle),
Q : 四元数(Quaternion)
DCM : 方向余弦矩阵(Direction Cosine Matrix)–类似于旋转矩阵
6、【忘记了】
7、【忘记了】
8、【忘记了】
9、【忘记了】
三、解答题
1、卷积操作。
给定一个800x800大小的网络,3通道,卷积核size为3x3,stride为1,padding为1,pooling为max pooling,经过几次操作,得到的特征层维度?每个区域感受野?
2、k-means算法相关问题。
优点:易于实现
缺点:可能收敛于局部最小值,在大规模数据收敛慢
3、双目视觉相机baseline与测距极限的关系。
两个相机的焦距都为F,成像最小分辨率为两个像素
引用参考
[1] 文中图片来源