一、前言
本文详细介绍了利用CMakeLists.txt文件把ROS项目导入到QtCreator进行代码编写和调试的过程,文末还介绍了ROS中使用Qt界面的方法
这种导入ROS项目到Qt的方法也适用于其他CMake创建的项目,这种方案缺点是导入项目后无法直接在Qt下面新建文件和package到项目,只能用命令行在Qt外面创建之后重新导入到Qt,最近得益于Levi-Armstrong等人的工作,他们开发了一个名为ros_qtc_plugin 的Qt插件可以方便的导入、创建、编译、调试ROS项目,博主认为这是一个目前为止最完美的解决方案,详细请看博主的另一篇文章介绍:如何使用Qt插件在Qt中进行ROS开发。
本文所用操作系统为Ubuntu 14.04 64位,Qt版本为Qt5.5.1(Qt Creator3.5.1)
本文地址:http://blog.csdn.net/u013453604/article/details/52167213
参考:
ROS wiki IDEs
Qt App Templates
Write and Debug code for ROS with QtCreator
ROS: How to develop catkin packages from an IDE
二、创建Qt-ROS快捷方式
因为Qt本身支持CMake项目,所以从终端启动QtCreator是可以直接加载运行ROS相关项目的,如果你不想从终端启动,那么需要做一些设置来确保启动QtCreator的同时加载ROS环境变量
这里我们来创建一个启动器(即桌面快捷方式):
点击左上角Ubuntu标志(或者按下Win键)搜索一个叫“启动应用程序”的软件,然后选择“添加”创建一个启动程序,如下图

(1) 我将这个启动器命名为“Qt-ROS”,然后点击“浏览”,选中Qt5.5.1/Tools/QtCreator/bin/下的qtcreator可执行文件,然后“命令”栏会出现qtcreator可执行文件的绝对路径
(2) 我们还需要在这行绝对路径前面加一句bash -i -c,用空格和后面的路径隔开
(3) 然后点击“添加”,这样“额外的启动程序”栏下就出现了名为“Qt-ROS”的启动器,用鼠标把它拖到桌面变成了一个桌面快捷方式,把它重命名为“Qt-ROS”
(4) 右键选中它,“属性”,在“基本”页点击名称左边的图标可以设置自定义图标,我将其设为原来qtcreator的图标,图标地址在
/Qt5.5.1/Tools/QtCreator/share/qtcreator/welcomescreen/widgets/images/qtcreator.png
(5) 再到“权限”页选中“允许作为程序执行文件”
这样qtcreator快捷方式方式就建好了,如下图

用这个快捷方式打开ROS项目之后只需要在终端运行一个roscore,就能开始运行或者调试代码,并且在Debug模式下可以看到程序内部的许多变量,ROS调试再也不是问题啦
如果你不想那么麻烦可以直接在桌面新建一个Qt-ROS.desktop文件,然后把下面代码复制进去
[Desktop Entry]
Exec=bash -i -c qtcreator %F
Icon=QtProject-qtcreator
Type=Application
Terminal=false
Name=Qt-ROS
GenericName=Integrated Development Environment
MimeType=text/x-c++src;text/x-c++hdr;text/x-xsrc;application/x-designer;application/vnd.nokia.qt.qmakeprofile;application/vnd.nokia.xml.qt.resource;
Categories=Qt;Development;IDE;
InitialPreference=9其中的Exec Icon Name不需要再修改,这个配置可以直接用
三、导入ROS项目到Qt
现在我们用前面创建的Qt-ROS.desktop快捷方式打开Qt,开始导入ROS项目
1、导入单个package
如果你只想导入单个package进行调试请看这里:
(1) 双击前面创建的Qt-ROS快捷方式打开Qt
(2) “open project”或者“文件”——“打开文件或项目”,选择catkin工作空间里package包的CMakeLists.txt,如下图
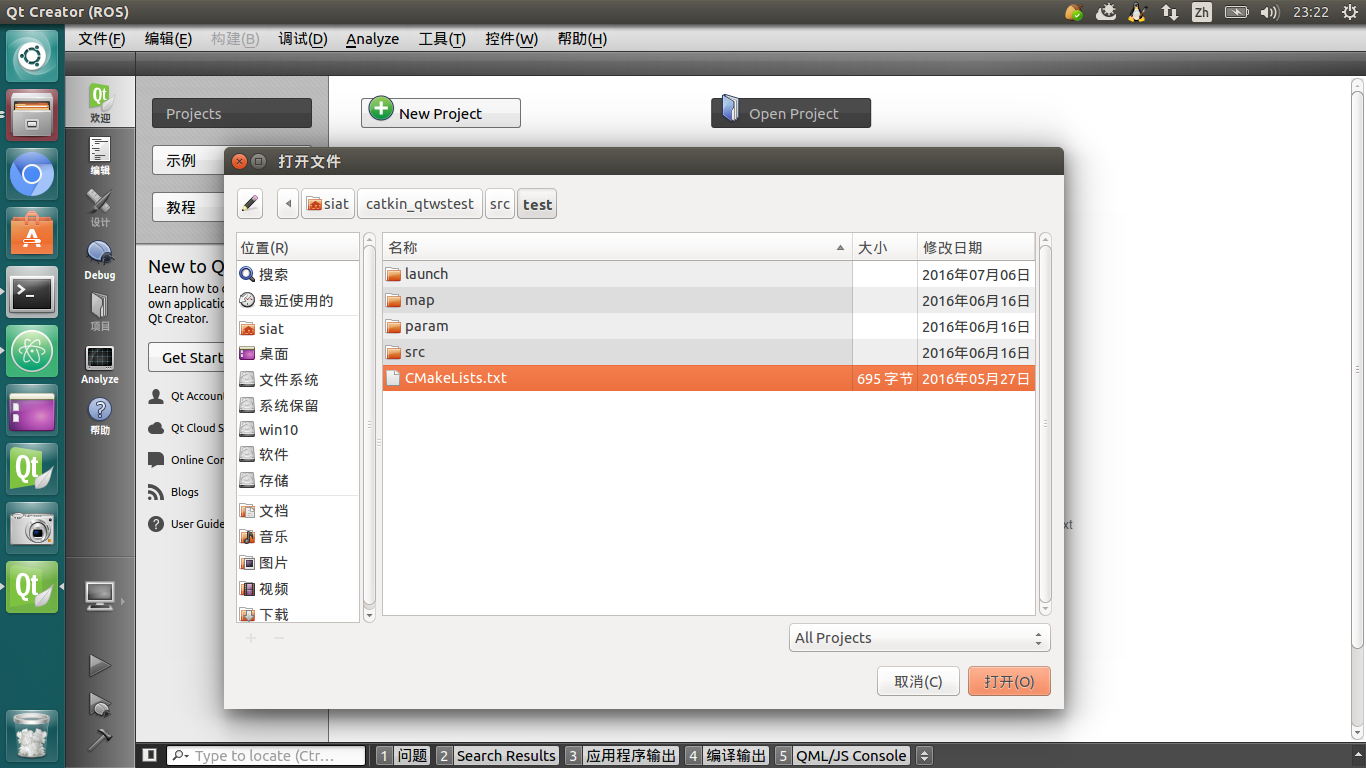
我的catkin工作空间是catkin_qtwstest,里面有一个package叫test,test的CMakeLists.txt在catkin_qtwstest\src\test下面
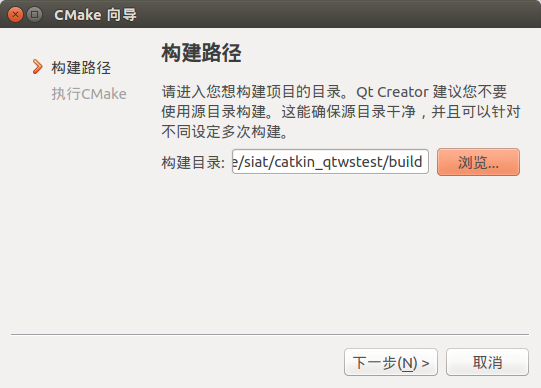
(3) 构建路径中的“构建目录”选择catkin_qtwstest/build,进入“下一步”
(4) “执行CMake”的步骤如下图
如果需要Debug,填入参数-DCMAKE_BUILD_TYPE=Debug;
如果不需要Debug,你想直接运行,填入参数-DCMAKE_BUILD_TYPE=Release
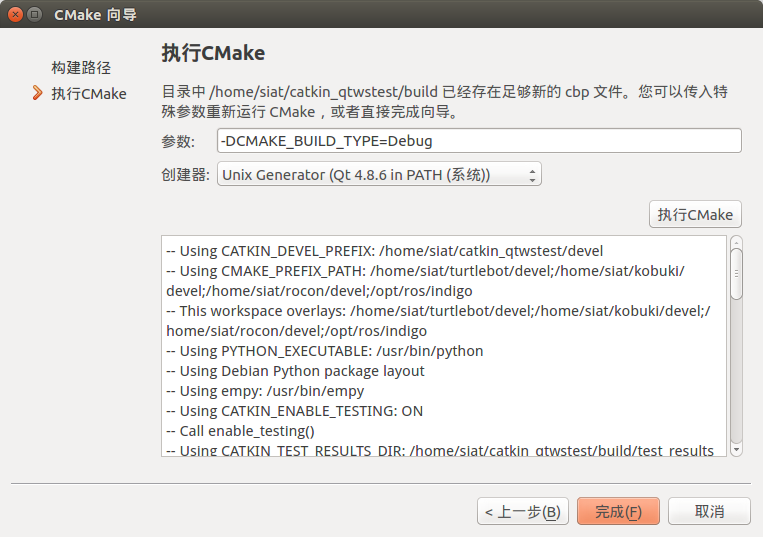
然后点击“执行CMake”——“完成”,package成功导入到Qt
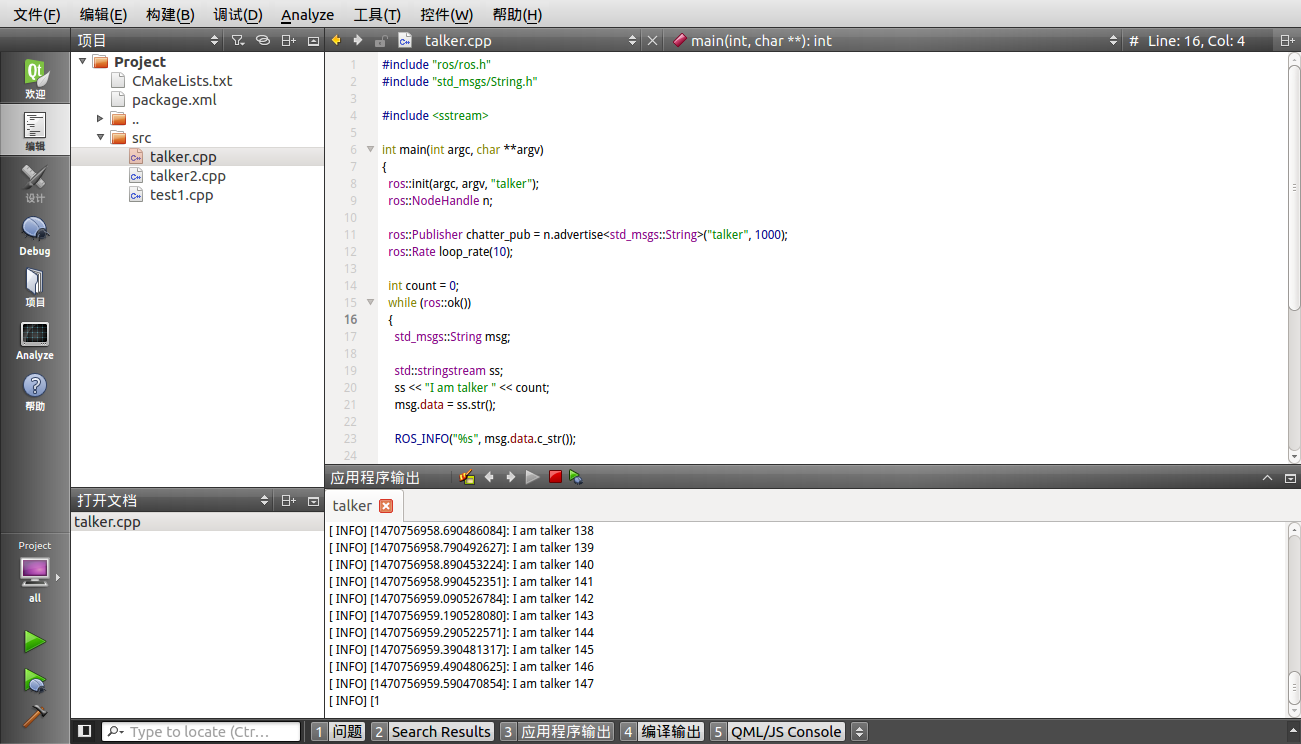
(5) 导入之后如下图,可以看到src下面有三个.cpp文件,这是我写的三个节点,在CMakeLists.txt里我把它们分别编译成三个可执行文件,名字不变
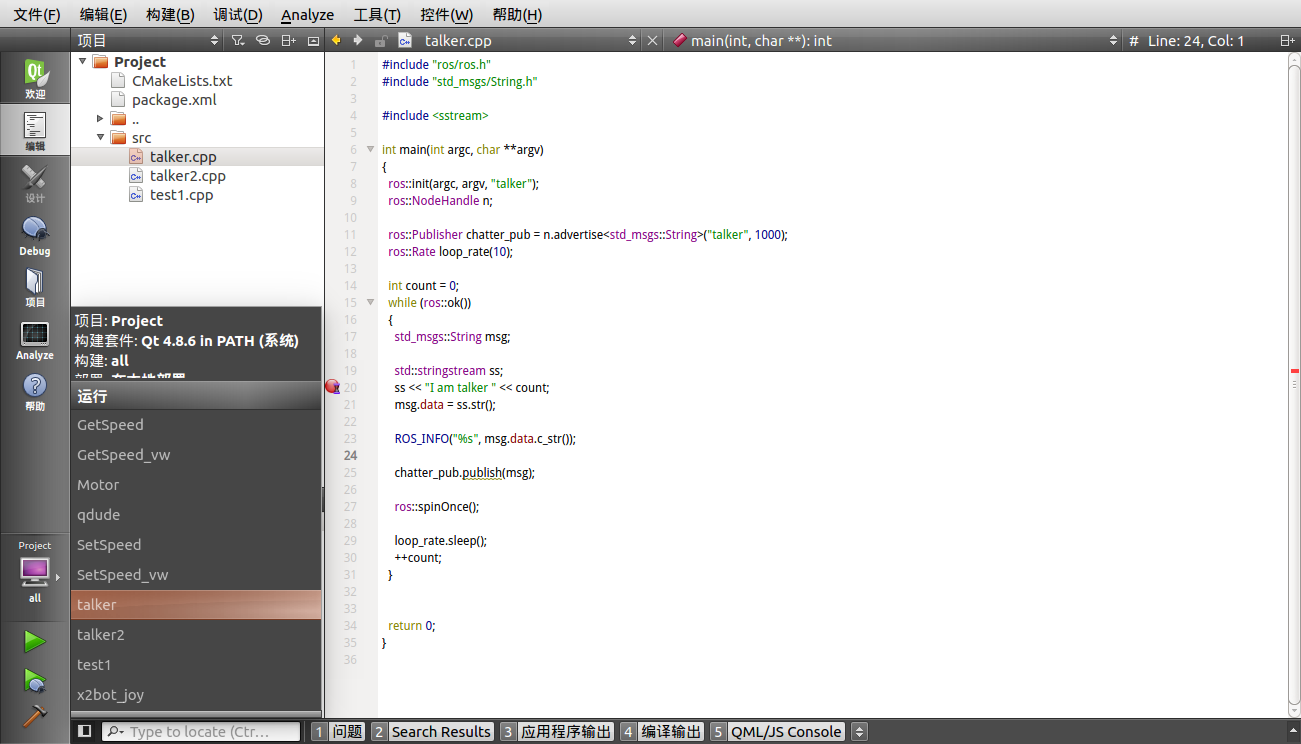
如果想运行这些节点需要在终端运行一个master,节点才能正常运行,执行命令:
$ roscoreQt界面左下角有个小的电脑图标“project all”,点击它可以选择运行的节点,如图我选择名为“talker”的节点
点击左下角绿色三角形可以运行,点击带爬虫的绿色三角形可以进行调试
(6) 如下图是运行时的情况
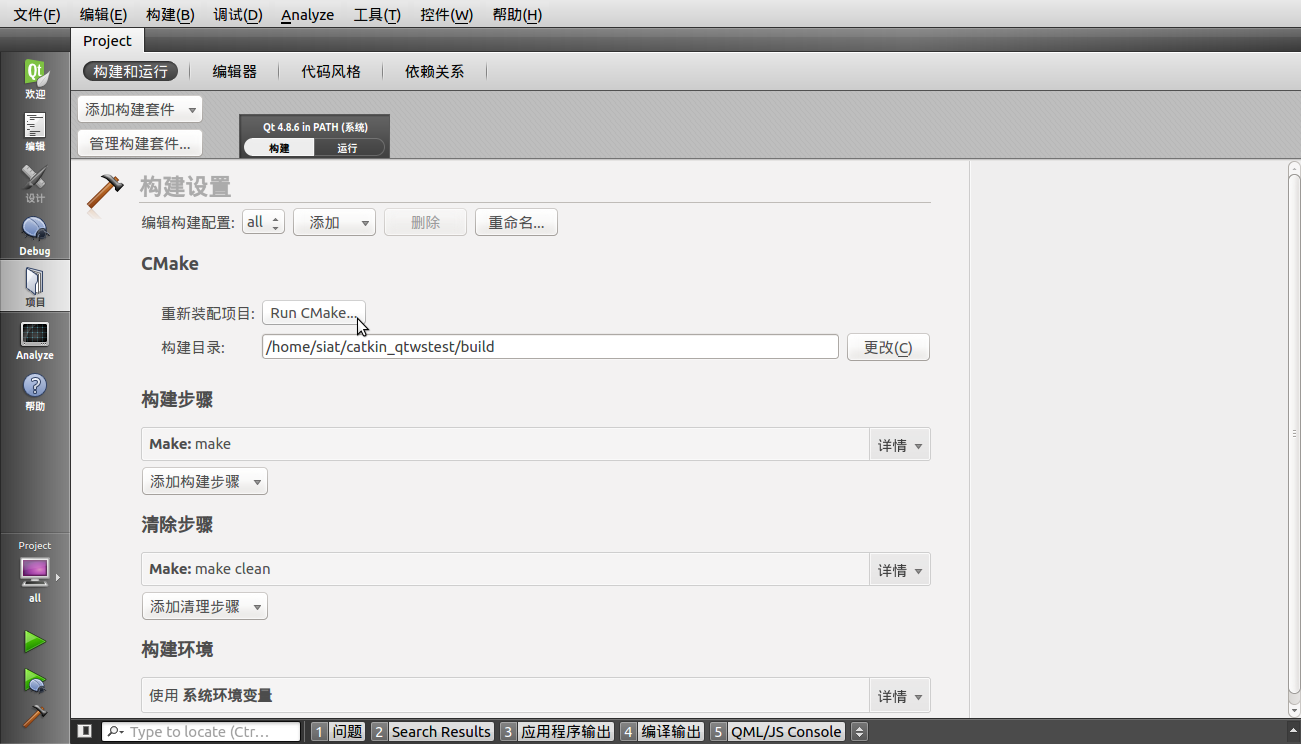
(7) 如果需要更改项目配置可以点击Qt界面左侧的“项目”,如下图
在“构建”页的“重新装配项目”后面有一个“Run CMake…”点击它可以如(4)更改编译参数
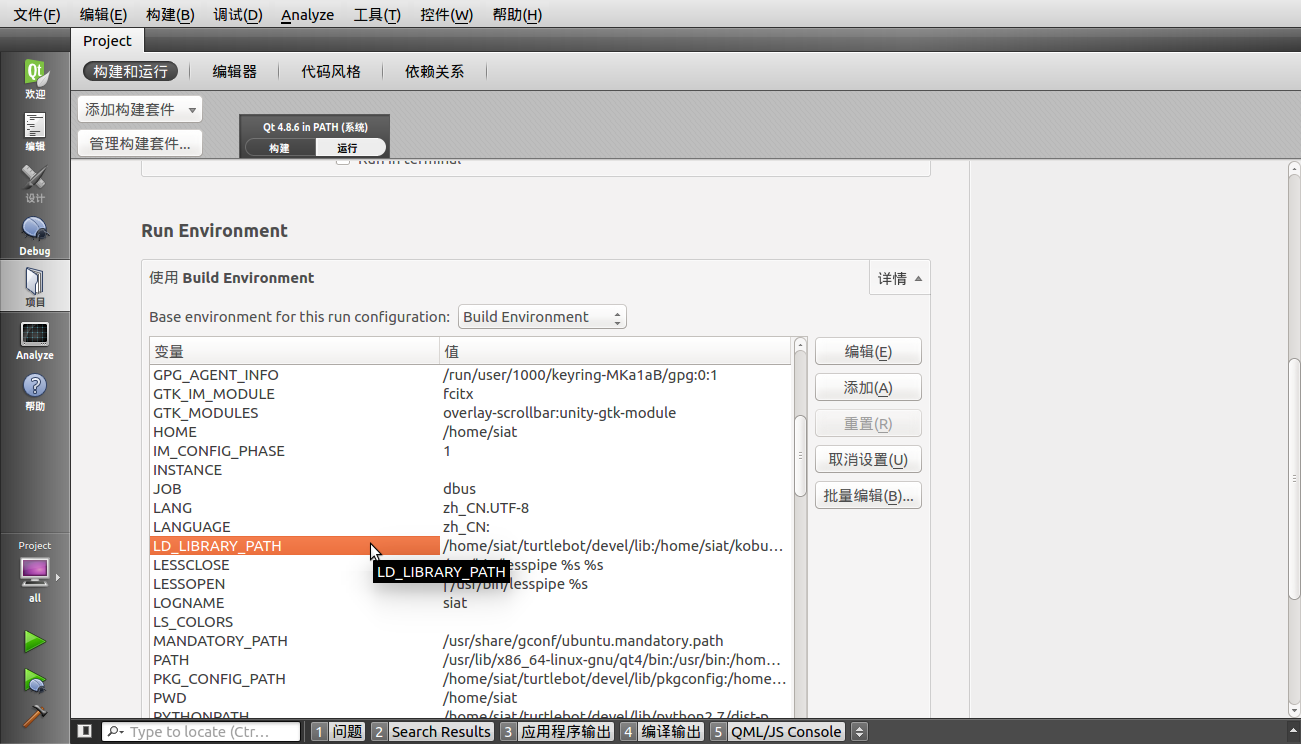
(8) 在“项目”的“运行”页可以修改一些环境变量,如下图
(9) 如果想重新导入这个项目需要删除catkin_qtwstest\src\test下的CMakeLists.txt.user文件,然后按照上述操作重新导入
2、导入工作空间所有package
如果你想把一个catkin工作空间里的所有package导入到Qt请看这里:
(1) 我们要导入的工作空间名字叫catkin_qtws,它里面有许多其他的package,进入工作空间根目录catkin_qtws\src我们可以看到工作空间的CMakeLists.txt是一个符号链接,如下图
我们需要把它变成一个真正的CMakeLists.txt,执行如下命令
cd ~/catkin_qtws/src
sed -i '' CMakeLists.txt然后你会发现catkin_qtws\src下的CMakeLists.txt图标变得和package里面的一样了
(2) 双击前面创建的Qt-ROS快捷方式打开Qt
(3) “open project”或者“文件”——“打开文件或项目”,选择catkin工作空间里的CMakeLists.txt,如下图
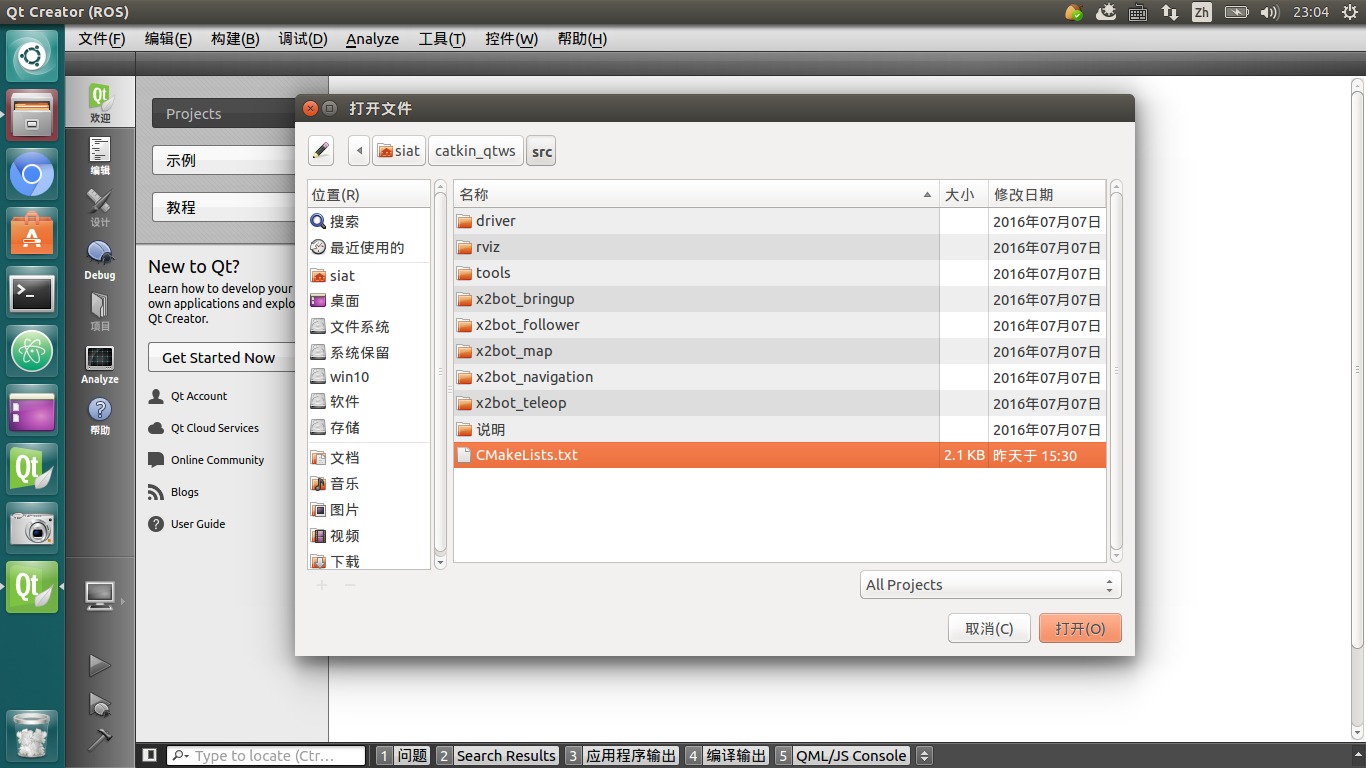
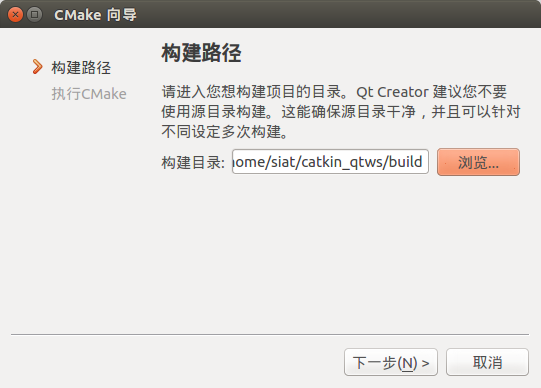
(4) 构建路径中的“构建目录”选择catkin_qtws/build,进入“下一步”
(5) “执行CMake”步骤如下图
如果需要Debug,填入参数-DCMAKE_BUILD_TYPE=Debug;
如果不需要Debug,你想直接运行,填入参数-DCMAKE_BUILD_TYPE=Release
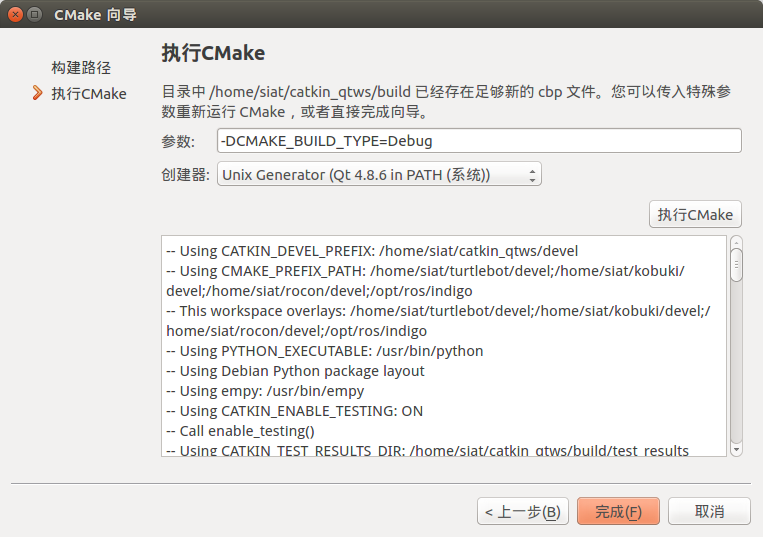
然后点击“执行CMake”——“完成”,package成功导入到Qt
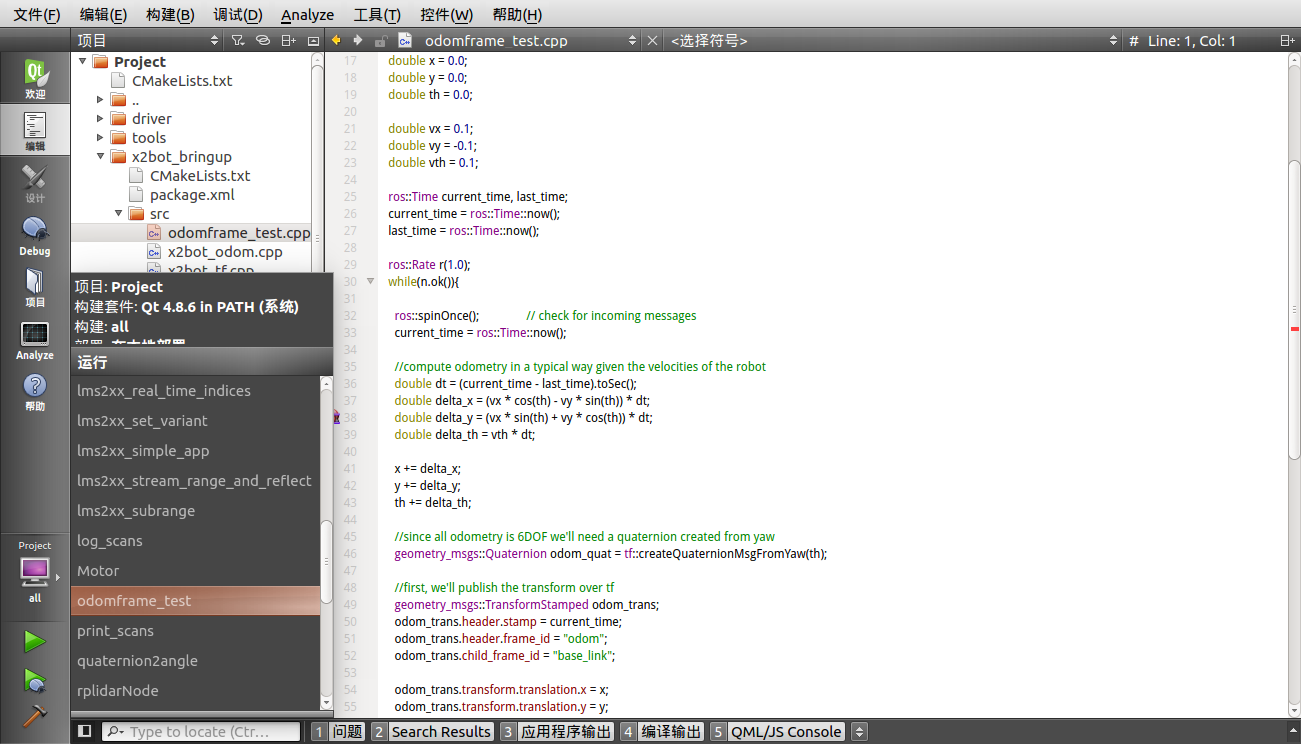
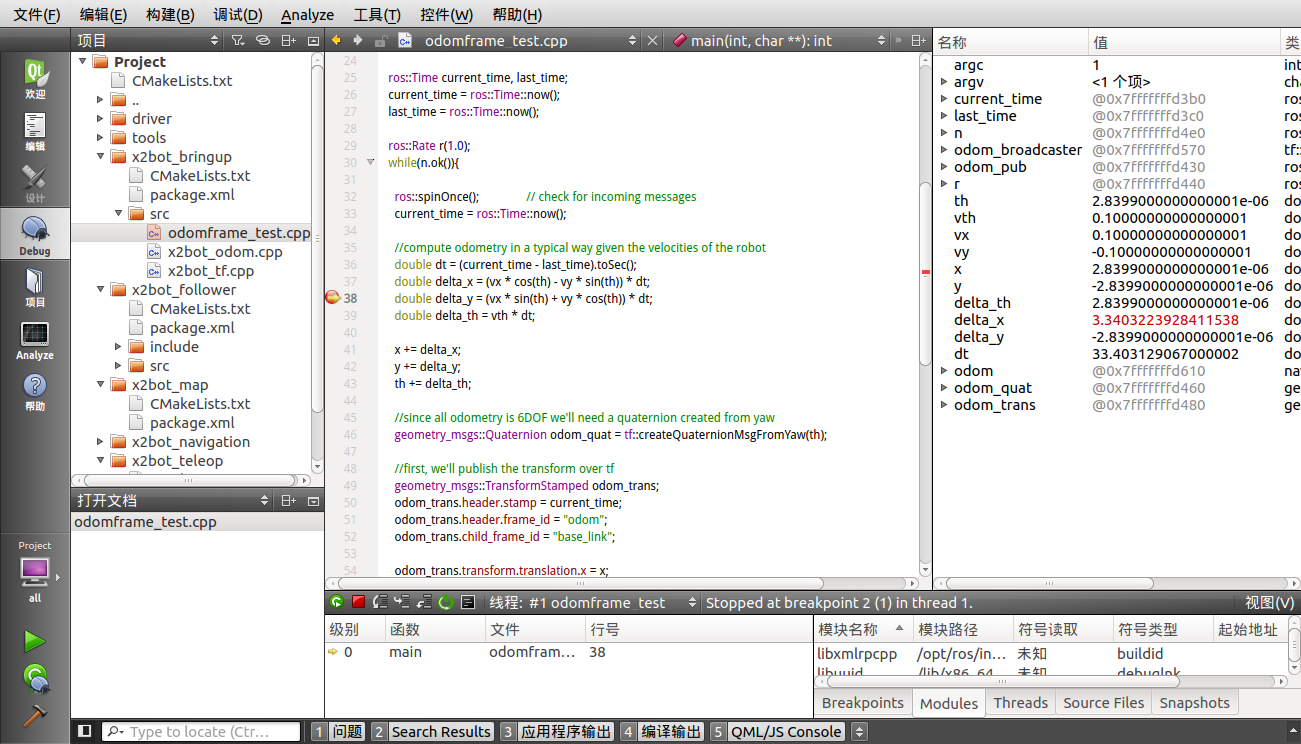
(6) 导入之后如下图,这里面有很多我写的package,这里有一个叫odomframe_test.cpp的文件是ROS wiki上的一个示例代码,我们以这个odomframe_test节点为例
如果想运行odomframe_test节点需要先在终端运行一个master,节点才能正常运行,执行命令:
$ roscoreQt界面左下角有个小的电脑图标“project all”,点击它可以选择运行的节点,如图我选择名为“odomframe_test”的节点
点击左下角绿色三角形可以运行,点击带爬虫的绿色三角形可以进行调试
(7) 如下图是调试odomframe_test节点的情况
(8) 如果想重新导入这个项目需要删除catkin_qtws\src下的CMakeLists.txt.user文件,然后按照上述操作重新导入
3、在ROS中使用QT界面
在终端可以直接用catkin_create_qt_pkg命令创建带Qt界面的ROS package,再按照前面说的方法导入到Qt即可
这里参考的是qt_createTutorialsQt App Templates
(1) 要使用catkin_create_qt_pkg命令需要安装一个包,执行如下命令:
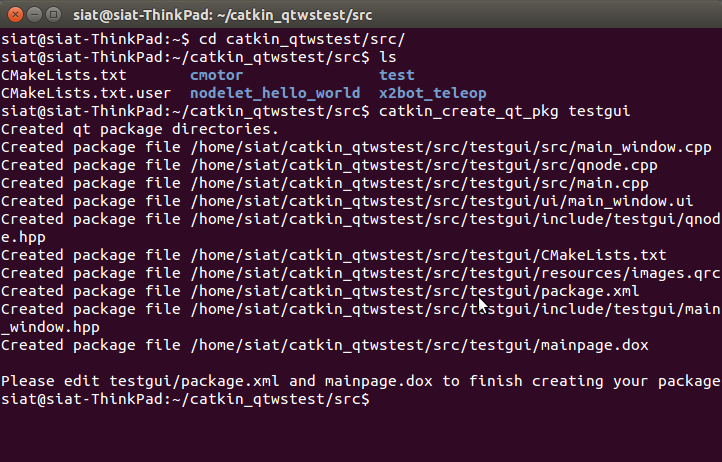
$ sudo apt-get install ros-indigo-qt-ros这样我就可以使用catkin_create_qt_pkg命令创建一个名为testgui的package
$ cd catkin_qtwstest/src/
$ catkin_create_qt_pkg testgui如下图
(2) 按照上述方式重新把catkin_qtwstest工作空间导入到Qt中,如下图
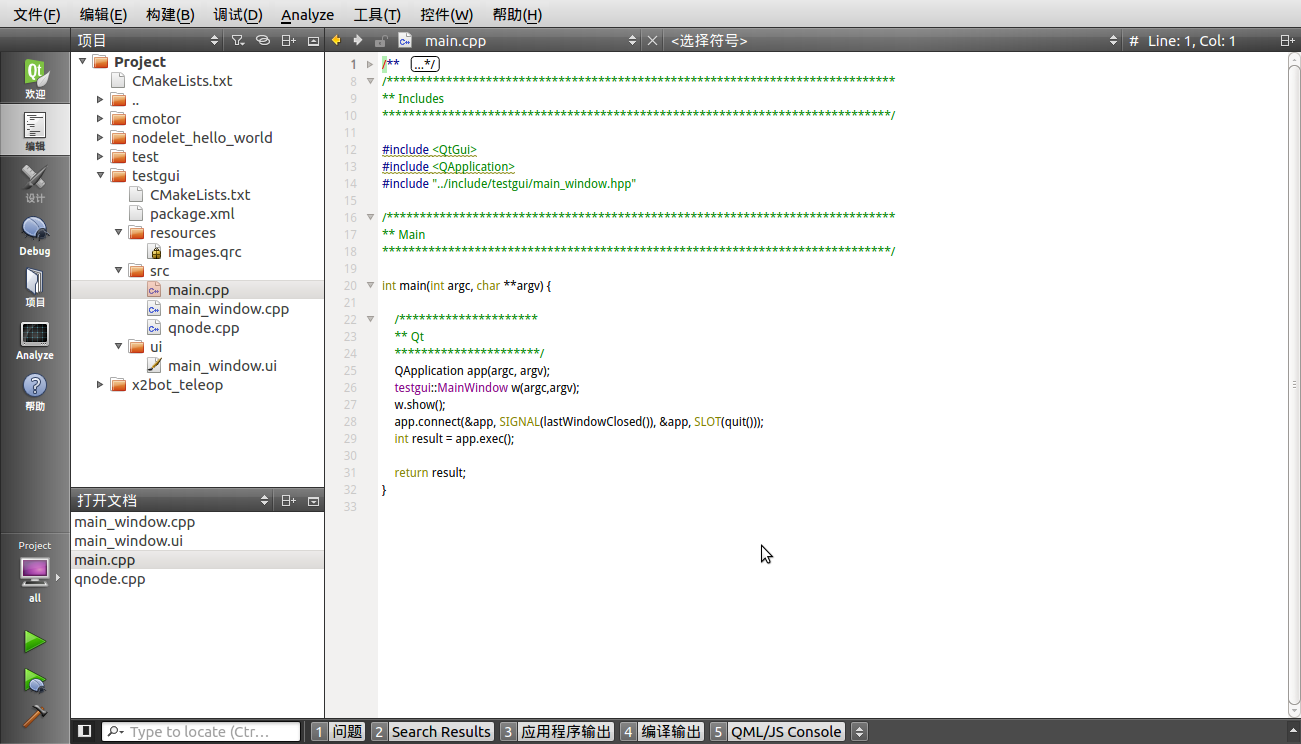
在左侧的树状图可以看到testgui下的目录结构,自动生成的main.cpp、main_window.cpp、qnode.cpp和main_window.ui包含Qt界面的基本元素
(3) 要运行testgui节点先启动一个roscore,如图
$ roscore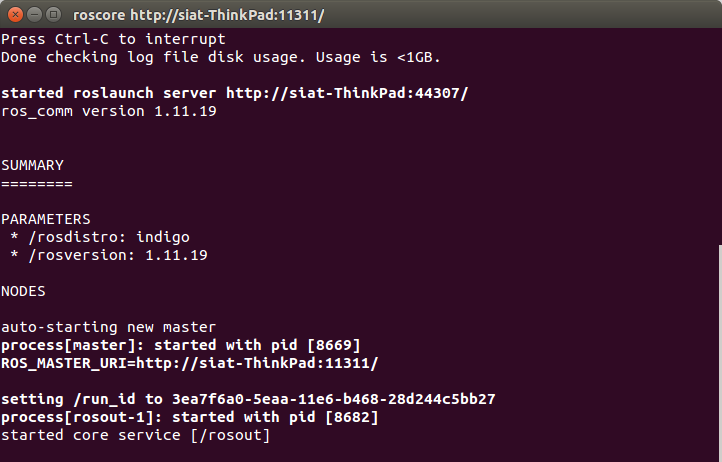
然后点击Qt左下角的绿色三角形运行testgui节点,如下图
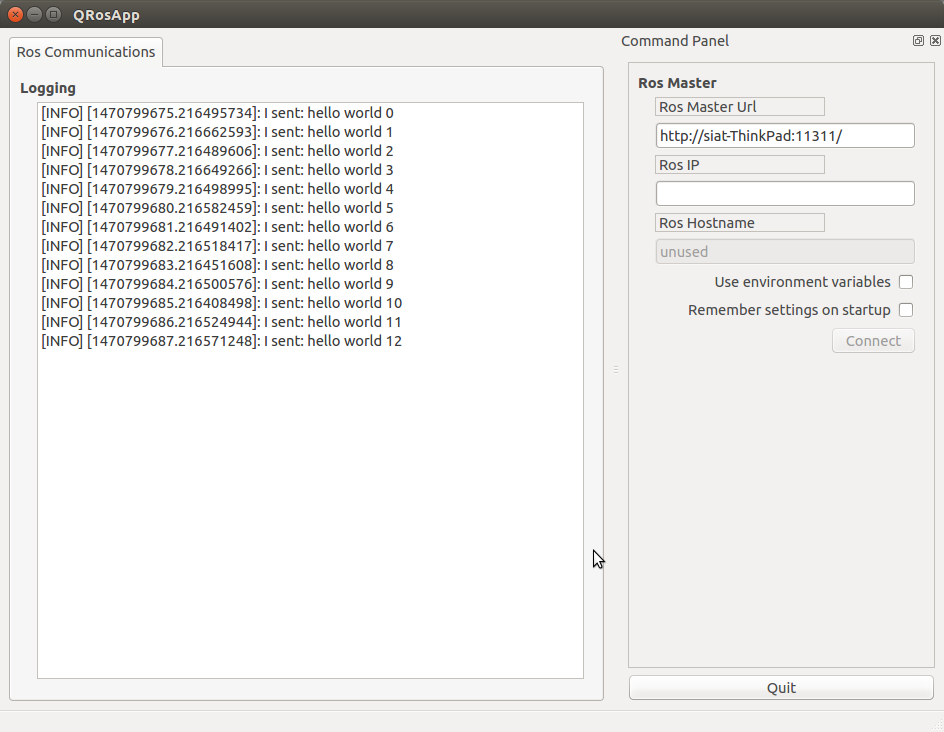
根据roscore的ROS_MASTER_URI填写UI界面上的ROS_MASTER_URI,然后点击“connect”,testgui节点开始在名为/chatter的topic上发送字符串如图