使用内容适应暗通道和后置增强的单张图像去雾
摘要:作为一个具有挑战性的问题,图像去雾在计算机视觉应用中有很重要的地位。暗通道先验方法因为其简单高效的特性,已经被广泛的研究用于图像去雾;然而,这种方法也有一些问题:过饱和,伪影和较暗的外观效果。为了解决这些问题,本研究提出了一种单张图像去雾的方法,使用内容适应的暗通道和后置增强的方法。此项研究的主要贡献如下:第一,提出了一个关联的滤波器用于高效的计算暗通道,它可以将引用图像的结构和粗糙图像的灰度等级转换到滤波器的输出;第二,基于图像内容的暗通道置信度被用于限制的暗通道。 最后,设计了后增强方法,以映射恢复无雾图像的亮度并保留局部对比度。 实验结果表明,所提出的方法显著提高了有雾图像的可见度。
1. 介绍
由于大气吸收和散射,照相机从场景点接收的辐照度沿着视线衰减,并且入射光与空气光混合。这种现象,称为霾或雾,会显著降低场景的可见性。大多数计算机视觉应用,如图像分割和对象跟踪,通常会受到有雾图像可见性差的影响[1-3]。因此,在许多实际应用中非常需要除雾。通常,雾度与场景深度之间的相关性很高。由于很难从单张图像估计景深,早期的去雾方法通常需要多个输入图像或附加信息[4-8]。然而,在许多情况下不可能完全满足这些要求,因此人们基于强先验或假设,提出了单图像方法[9-13]。
最近,单张图像去雾进展显著。一些方法通过对比度增强来提高图像可见度[11,14-17]。这些方法通常不考虑景物深度,因此它们本质上不能随着场景深度的变化去除雾霾。例如,Tan的方法[11]通过最大化局部对比度显著提高了可见性,但由于过度增强,结果常常看起来不自然。一些其它方法通过图像恢复来除雾。Fattal的方法假定透射率和表面阴影是局部不相关的,这个方法虽然是物理健全的,但不能很好地处理严重的雾[10]。 何凯明 等人[9]提出暗通道先验,即,室外无雾图像中的大多数局部图块中包含一些像素,这些像素至少在一个颜色通道中强度非常低,因此他们通过简单地将暗通道减少为零来除雾 。
暗通道先验是简单的,但对于单张图像去雾是有效的。基于何凯明等人的工作[9],已经提出了许多使用暗通道的方法[9,13,14,18]。然而,很可能图像的一些区域不满足暗信道优先,并且计算暗信道也不是一项容易的任务。结果,这些方法可能遭受以下问题中的一个或多个。首先,一些方法通常导致颜色过饱和,因为它们不能满足特定的限制要求:所获得的暗通道应该不比最小颜色通道更亮的。其次,这些方法通常将伪影引入特定的平滑区域,这些区域中暗信道先验是不可靠的。最后,在雾化去除之后,恢复的无雾图像通常看起来很黑,因为来自场景点的辐照度在其传播期间被衰减。
为了解决上述三个问题,我们提出了使用内容适应暗通道和后增强的单图像模糊去除的方法。这项工作的主要贡献如下:首先,为了有效并高效地获得暗通道,我们提出了关联滤波器,其可以将两个输入图像的结构和灰度级分别转化到滤波输出。其次,我们提出暗通道置信度以根据图像的内容限制暗通道。最后,灵感来自恢复的无雾图像的特点,我们设计后增强方法映射亮度并保留局部对比度。与现有技术相比,实验结果表明,所提出的方法在不同的有雾图像上产生令人满意的结果。
本文的其余部分组织如下。下一节介绍对现有方法存在问题的观察。第3节给出了关联滤波器的定义,暗通道置信度的概念,以及使用内容自适应暗通道方法去雾的过程。 第4节讨论了恢复的无雾图像的特性,并描述了后增强方法,第5节针对一些现有的技术方法进行比较实验。最后,第6节得出结论。
2. 观察
大气散射模型,通常简化为(1),广泛用于去雾[4,19,20]。 使用暗通道先验的方法分别通过(2)和(3)计算透射率
其中
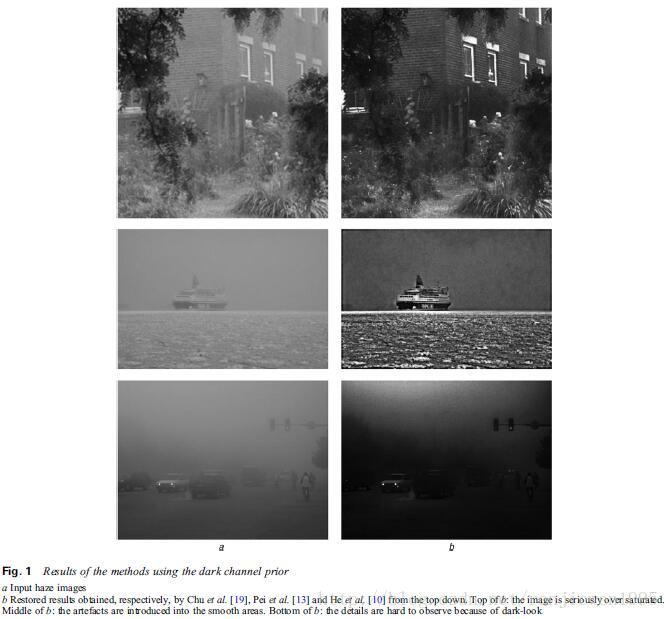
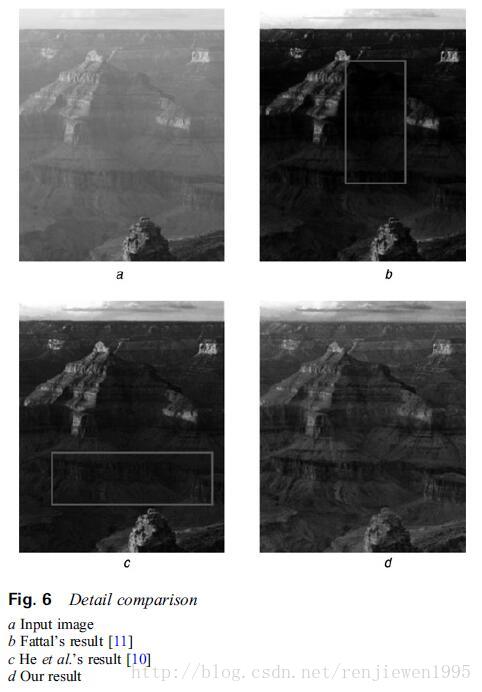
Fig.1 使用暗通道先验方法的结果
a 输入有雾图像
b 已恢复去雾图像。b组图像由上到下,第一张有严重的过饱和,第二张在平滑区域中引入了严重的伪影,第三张由于图像整体很暗的外观,导致细节难以观察。
首先,我们发现过饱和主要是因为估算的暗通道
其次,使用暗信道先验的方法容易将伪影带入这两种区域,第一种为平滑区域,例如灰色道路和白色墙壁;第二种为由于遭受了严重的大气散射而不可能恢复细节的区域,特别是对于JPEG压缩的图像。基于这样的观察:暗通道的适用性取决于图像的内容,我们引入暗通道置信度,它用于通过考虑图像的内容来限制暗通道。
最后,由于大气散射,来自场景点的亮度通常是不足的,使得恢复的无雾图像的强度非常低。 有必要对恢复的无雾图像进行后置图像增强处理。 然而,诸如直方图均衡的传统方法不能充分利用恢复无雾图像的特性。 虽然恢复的无雾图像看起来很黑,但其局部对比确实有所改善。 因此,我们提出后增强,来可以扩展暗区的动态范围,同时保持局部对比度。
3 除雾
在本节中,我们提出了去雾的技术细节,包括四个步骤。 首先,我们使用关联滤波器获得暗通道。 其次,我们明确给出了暗通道置信度的定义。 然后,我们基于[9]的工作计算空气光,并且我们最终使用内容适应暗通道去雾。
3.1关联滤波器的定义
如[22]中给出的,联合双边滤波器使用空间滤波器核和值域滤波器核,它们分别由两个不同的图像确定。 然而,本文所提出的关联滤波器仅使用由粗糙图像和参考图像确定的值域滤波器核。这个关联滤波器能够将参考图像的结构和粗糙图像的灰度级转化到滤波器的输出,如图2示出。总体来说,关联滤波器的核心思想是:滤波结果是粗糙图像的加权平均值,权重与粗糙图像和参考图像之间的像素差值负相关。 关联滤波器
其中
因为关联滤波器的权重仅取决于像素的值的差异,所以我们可以创建255×255的表来存储不同灰度级之间的权重,然后通过查找表来确定权重。 此外,表是对角对称的,因此我们只需要计算一半的值。 结果,关联滤波器的复杂度远低于联合双边滤波器的复杂性,由于双边滤波器其考虑了像素之间的空间距离,尤其是对于大尺寸的图像。
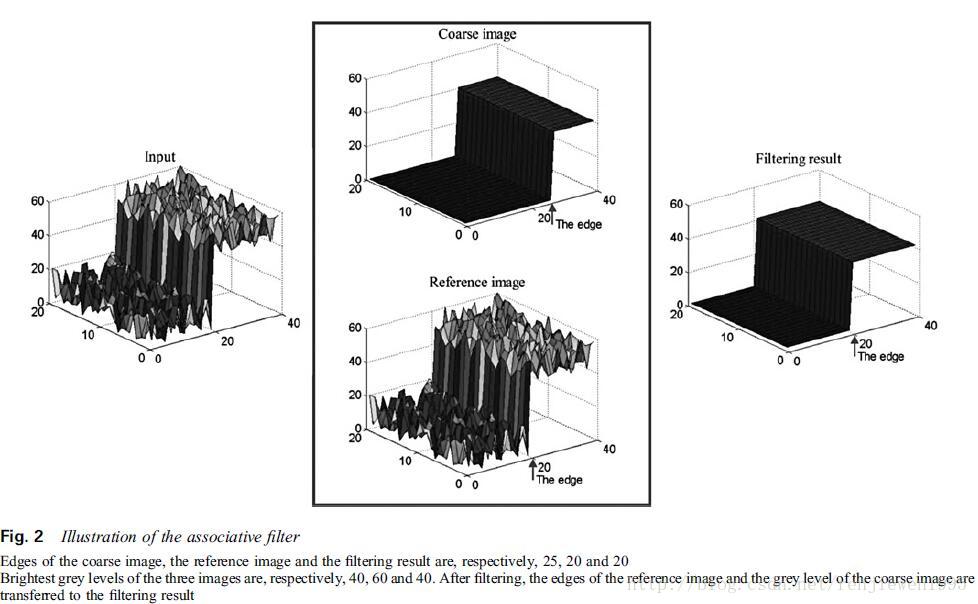
图 2 关联过滤器的示意图;
粗糙图像、参考图像、滤波结果的边缘分别为25,20和20;
三个图像的最亮灰度级分别为40,60和40,在滤波之后,参考图像的边缘和粗糙图像的灰度级被转化到滤波结果
3.2 暗通道计算
通过分别将粗糙暗通道
其中σ经验地设置为7,局部块Ω’的大小根据[9]设置为15×15。很明显
因此,容易验证
然后,我们可以获得
因为
为了去除不必要的纹理,我们根据经验将(6)式中
图3示展示了使用关联滤波器的示例。 我们可以看到关联滤波器不仅保留了最小图像的结构,而且去除了块效应和不必要的纹理。 此外,图 3c中每个像素的灰度级都不比图3a中的亮。

图3 使用关联滤波器示例
a. 最小图像 b. 有块效应的暗通道图像 c. 改善的暗通道图像
3.3置信度评估
暗通道置信度基于两个假设来定义。首先,局部亮度变化越小,暗通道越不可靠。这是因为平滑区域不满足暗信道先验。然而,即使没有亮度变化,也不意味着完全没有雾。例如,暗通道在亮度为255的平滑区域中是完全不可靠的,而在亮度为0的平滑区域中是完全可靠的。为了表示灰度差,我们引入第二个假设:暗通道越亮,可靠性越低。
我们通过取三个颜色通道的最大值计算亮度,即
我们基于人类视觉系统(HVS)的最小可视失真(JND)描述来模拟第一个假设。 JND是指HVS无法感知的最大亮度变化[25,26]。 JND曲线主要与背景亮度相关,通常简化为:
其中
在背景亮度为127 [25,26]的情况下,容易验证HVS感知亮度变化能力最佳。换句话说,如果HVS在背景亮度为127的情况下不能感知某一亮度变化,则在其它情况下也不能感知这一亮度变化。此外,由于像素亮度与背景亮度成线性关系[27],背景亮度与亮度变化近似线性。假设
根据第一个假设,如果亮度变化大于JND值,则暗通道是可靠的,而当亮度变化小于JND值时,置信度应急剧下降。 这是根据sigmoid函数,因此我们使用由(14)给出的sigmoid函数来模拟第一假设。类似地,我们使用(15)模拟第二个假设
其中
通常,在局部区域具有明显的亮度变化或暗通道非常低的情况下,暗通道是可靠的。 因此,我们根据经验导出由(16)给出的暗通道置信模型,我们将(2)的透射率修正为(17)
我们可以看到
3.4空气光评估和雾去除
类似于[9]的方法,我们选择前10%最亮的像素,并取其亮度平均值作为每个颜色通道中的空气光,由
通过将
由于空气光有时不是白色的,所以
4. 后置增强
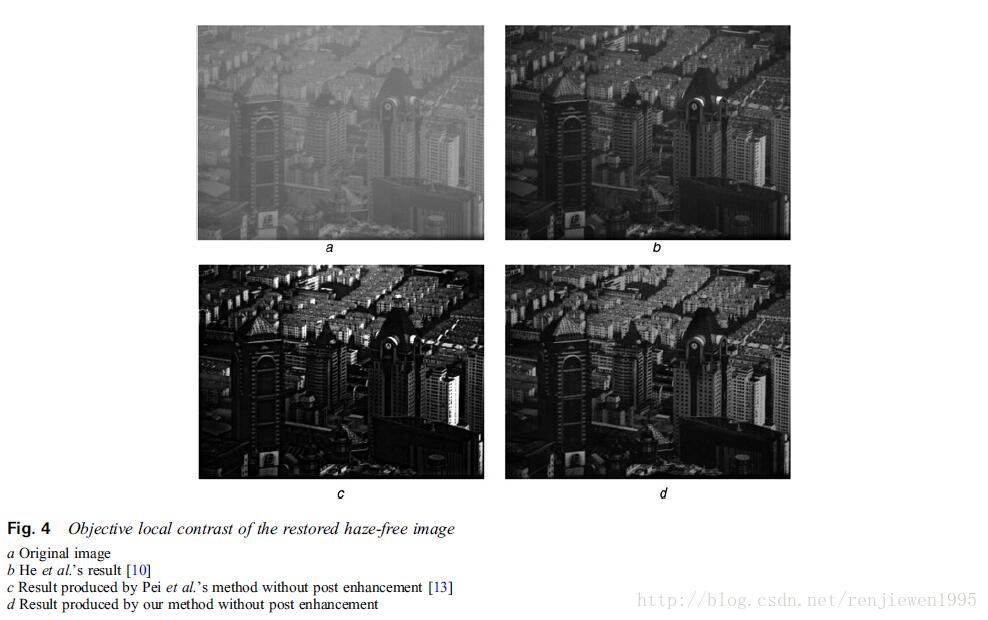
虽然恢复的无雾图像的客观局部对比度确实改善,但图像整体看起来较暗,如图4所示。恢复的无灰雾图像的大多数像素具有低灰度级,而一小部分数量的像素占据了较宽范围的高灰度级。我们已经测试了许多标准增强方法来增强恢复的无雾图像。 然而,这些方法通常不能充分利用恢复无雾图像的显著特征。 例如,直方图均衡方法通常使明亮区域中的对比度遭受损失,而基于Retinex的方法通常导致过度增强[28-31]。 因此,我们提出了后增强方法,其能够保持局部对比度并扩展低灰度级。
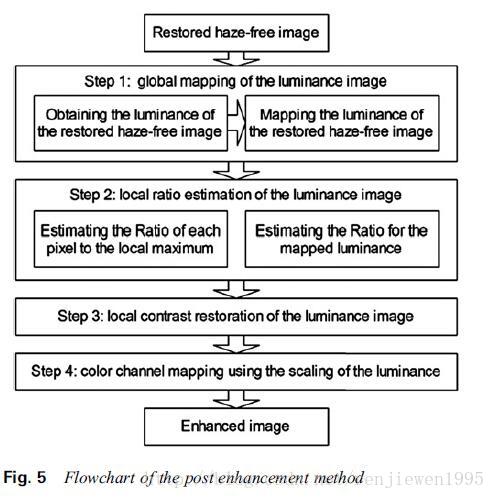
如图5所示,后增强包括四个步骤。 首先,我们全局地映射亮度以扩展低灰度级。根据[24],局部对比度取决于每个像素的亮度与背景亮度的比率。我们在第二步中估算每个像素与全局映射之前和之后的局部最大值的比率,并且通过在第三步骤中恢复每个像素与局部最大值的比率来恢复局部对比度。 最后,为了保持色调,我们根据亮度图像的缩放比例来增强每个颜色通道。
我们通过取每个像素的三个颜色通道的最大值来获得亮度图像。
我们使用[28]的方法全局地映射亮度图像
其中
我们通过获取亮度图像的局部最大值来获得粗略局部最大图像。 然后,我们使用关联滤波器,通过将亮度图像和粗略局部最大图像分别带入到
分别给出全局映射前后
由于亮度图像的局部对比度可能在全局映射之后降低,特别是在高灰度级的区域中,我们所提出的增强方法通过恢复每个像素与局部最大值的比率来得到最终增强亮度
最终增强的亮度图像与原始恢复的无雾亮度图像之间的比例是
由于三个颜色通道的缩放比例与亮度的缩放相同。对于恢复的无雾图像
5. 实验结果和讨论
我们将一些使用暗通道先验[9,12]的先进方法与我们所提出的方法做了一些比较,包括Tan的方法[11],Fattal的方法[10],Tarel的方法[19]和其他两个方法。根据三个标准:细节,颜色自然性和伪影进行评价。 此外,我们还在无雾图像上测试了后置增强方法,并与与CHE [29]和GUM [30]相比较。
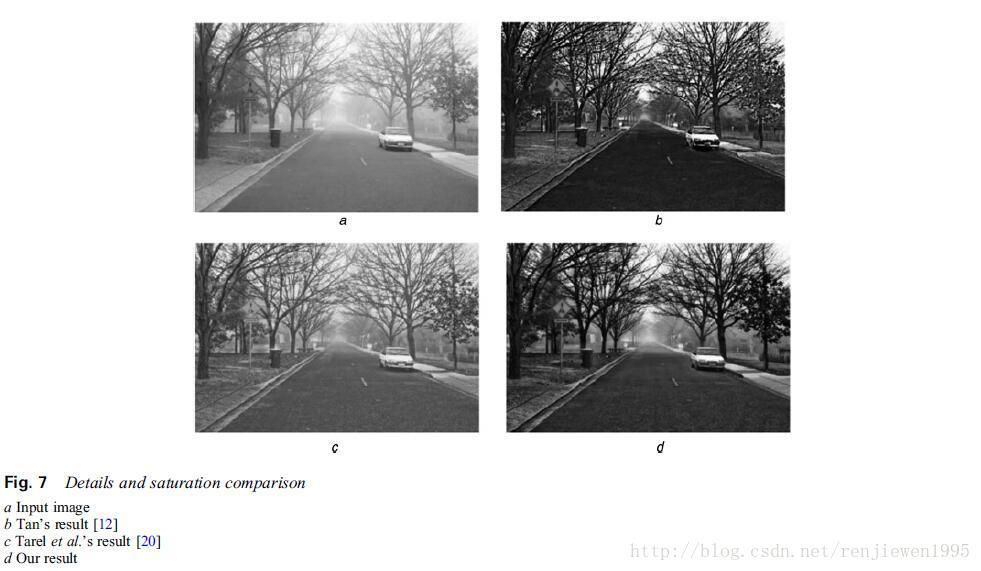
首先,我们基于如何增强细节来验证我们的方法。 6b和c,我们可以看到,Fattal的方法[10]和He等人的方法[9]完全去除了雾霾,但是它们恢复的无雾图像的细节不容易在标记为矩形的暗区域中观察到。相反,图7c是模糊的,Tarel等人的方法[19]不能彻底去除雾。如图6b和c所示,我们的方法不仅彻底消除了雾,而且自然地突出了细节。
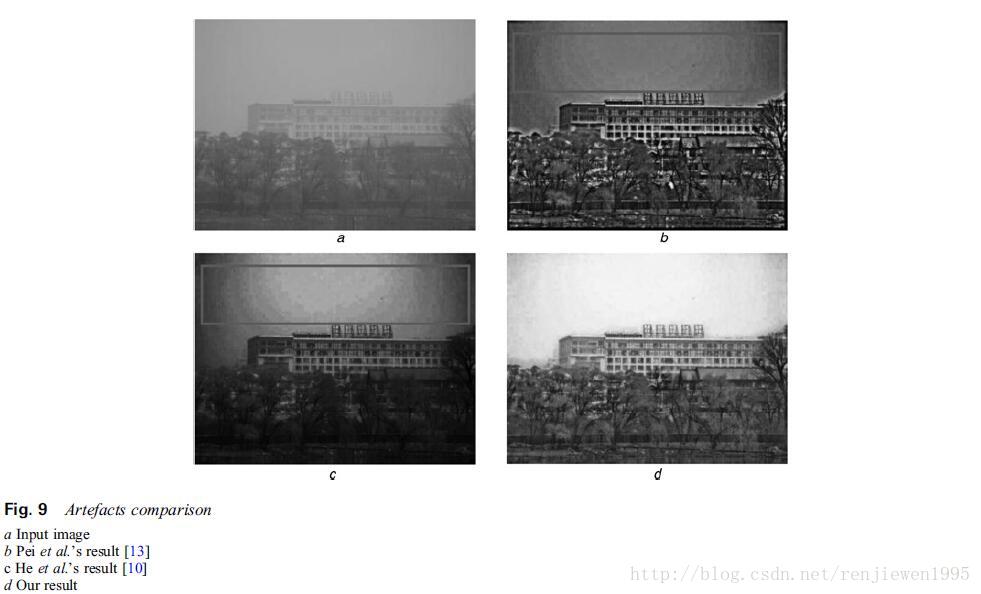
其次,我们基于如何保持色彩自然性来评估我们所提出的方法。He等人的方法[9]和Pei等人的方法[12]通过简单地将暗通道减少为零来去除雾,这导致它们的结果趋于过饱和,如图8b,c,9b和c所示。Tan的方法[11]有时遭受严重的色调偏移,如图7b示出。相比之下,我们的方法考虑了暗通道的置信度,使得我们结果的颜色看起来是自然的。
最后,我们基于如何防止伪影来测试我们的方法。图 8和9中的两个输入图像都被JEPG严重压缩,并且由于大气散射而严重降级。从两组图像中,我们可以看到,被比较的方法在由矩形标记的区域中产生严重的块效应。由于我们的方法采用暗通道置信度,在图8d和9d中没有严重的块效应,并且处理后灰度级在平滑区域和纹理区域之间自然变化。
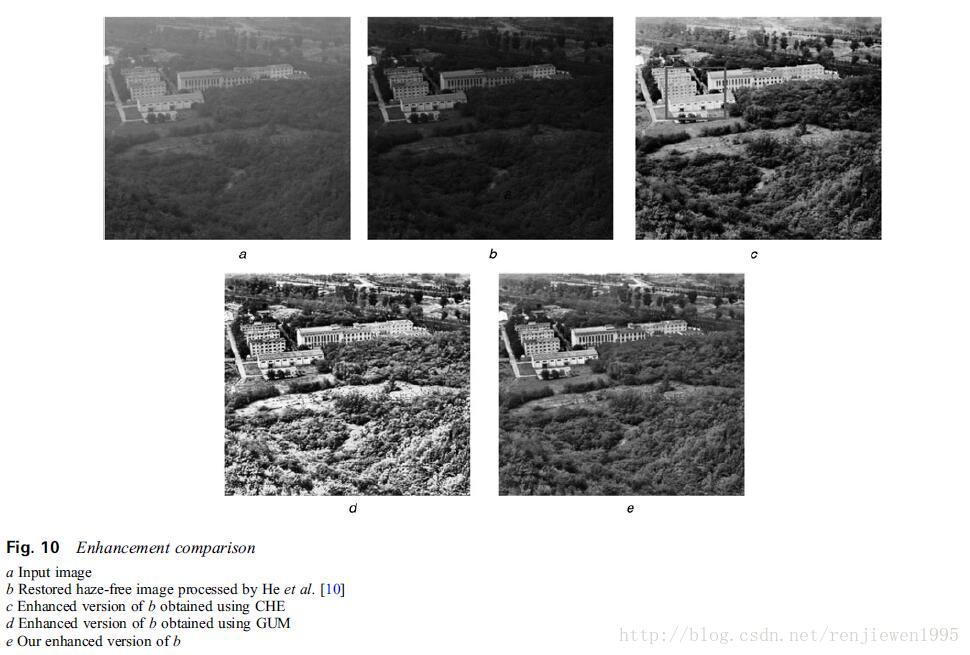
最后,我们将CHE [29]和GUM [30]与我们提出的后置增强方法比较。为了公平比较,所有的方法都是在用He等人方法[9]获得的恢复无雾图像上进行测试。CHE可能在明亮区域造成对比度损失,如图10C中标记的屋顶区域所示。此外,CHE不能有效地增强不同的区域。例如,图11d中由矩形标记的区域仍然保持黑暗。相反,图10d由于太亮而显得不自然。而GUM可能导致过度增强,如图11d所示的天空区域。相比之下,我们的结果的亮度是自然的,细节是明显的。


6. 结论
在本文中,我们提出了这种基于内容的暗通道和后置增强方式的单张图像去雾方法。我们提出的方法从三个方面增强了现有方法的效果。首先,通过考虑暗通道不应该比最小颜色通道亮,克服了过饱和问题。第二,我们提出暗通道置信度用来阻止将伪影带入平滑区域。最后,我们提出的增强方式增强了恢复的无雾图像,并保留了原图像的局部对比度。实验结果表明,我们的方法不仅可以有效的除雾,并且能够显著的增强细节。
由于在计算机视觉应用中非常需要图像去雾,因此有必要做更深入的研究工作来将我们所提出的方法在实时应用中实现,例如视频监视系统和车载视觉系统。在这些场景中,考虑实时系统的硬件环境很有必要。我们将这个问题留做后续研究。
7 Acknowledgments
This work is supported by the National Science Fund for Distinguished Young Scholars (61125206) and the 973Program (Project No. 2010CB327900). The authors would like to thank Jacob D’Avy and Kyle Goodrick for their helpul feedback. Special thanks go to the anonymous reviewers of this paper for their constructive comments.
8 References
- Guan, Y.-P.: ‘Spatio-temporal motion-based foreground segmentation and shadow suppression’, IET Comput. Vis., 2010, 4, (1), pp. 50–60
- Xu, M., Ellis, T., Godsill, S.J., Jones, G.A.: ‘Visual tracking of partially observable targets with suboptimal filtering’, IET Comput. Vis., 2011, 5, (1), pp. 1–13
- Yilmaz, A., Javed, O., Shah, M.: ‘Object tracking: a survey’, ACM Comput. Surv., 2006, 38, (4), pp. 1–3
- Narasimhan, S.G., Nayar, S.K.: ‘Vision and the atmosphere’, Int. J. Comput. Vis., 2002, 48, pp. 233–254
- Shwartz, S., Namer, E., Schechner, Y.Y.: ‘Blind haze separation’. Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2006, vol. 2, pp. 1984–1991
- Schaul, L., Fredembach, C., Susstrunk, S.: ‘Colour image dehazing using the near-infrared’. Proc. IEEE Int. Conf. Image Processing, Cairo, Egypt, 2009, pp. 1629–1632
- Narasimhan, S.G., Nayar, S.K.: ‘Contrast restoration of weather degraded images’, IEEE Trans. Pattern Anal. Mach. Intell., 2003, 25, (6), pp. 713–724
- Wei, Y., Dong, Z., Wu, C.: ‘Depth measurement using single camera with fixed camera parameters’, IET Comput. Vis., 2012, 6, (1), pp. 29–39
- He, K., Sun, J., Tang, X.: ‘Single image haze removal using dark channel prior’, IEEE Trans. Pattern Anal. Mach. Intell., 2011, 33, (12), pp. 2341–2353
- Fattal, R.: ‘Single image dehazing’. Proc. ACM SIGGRAPH, NY, USA, 2008, pp. 1–9
- Tan, R.: ‘Visibility in bad weather from a single image’. Proc. IEEE Conf. Computer Vision and Pattern Recognition, June 2008, pp. 1–8
- Pei, S., Lee, T.: ‘Effective image haze removal using dark channel prior and post-processing’. Proc. IEEE Int. Symp. Circuits and System, May 2012, pp. 2777–2780
- Xie, B., Guo, F., Cai, Z.: ‘Improved single image dehazing using dark channel prior and multi-scale Retinex’. Proc. Int. Conf. Intelligent Systems and Design Engineering Application, 2010, pp. 848–851
- Dongjun, K., Changwon, J., Bonghyup, K., Hanseok, K.: ‘Enhancement of image degraded by fog using cost function based on human visual model’. Proc. IEEE Int. Conf. on Multisensor Fusion and Integration for Intelligent Systems, 2008, pp. 64–67
- Jobson, D.J., Rahman, Z.,Woodell, G.A.: ‘Feature visibility limits in the non-linear enhancement of turbid images’. Proc. SPIE, Visual Information Processing XII, 2003, vol. 5108, pp. 24–30
- Woodell, G.A., Jobson, D.J., Rahman, Z., Hines, G.D.: ‘Enhancement ,of imagery in poor visibility conditions’. Proc. SPIE, Sensors, and Command, Control, Communications, and Intelligence Technologies for Homeland Security and Homeland Defense IV, 2005, vol. 5778, pp. 673–683
- Vizireanu, D.N., Halunga, S., Fratu, O.: ‘A grayscale image interpolation method using new morphological skeleton’. Proc. IEEE Int. Conf. Telecommunication on Modern Satellite, Cable and Broadcasting Services (TELSIKS 2003), vol. 2, pp. 519–521
- Chu, C., Lee, M.: ‘A content-adaptive method for single image dehazing’, (LNCS, 6298), PCM, 2011, pp. 350–361
- Tarel, J., Hautiere, N.: ‘Fast visibility restoration from a single colour or gray level image’. Proc. Int. Conf. Computer Vision, 2009, pp. 2201–2208
- Narasimhan, S.G., Nayar, S.K.: ‘Contrast restoration of weather degraded images’, IEEE Trans. Pattern Anal. Mach. Intell., 2003, 25,(6), pp. 713–724
- Xiao, C., Gan, J.: ‘Fast image dehazing using guided joint bilateral filter’, Vis. Comput., 2012, 28, pp. 713–721
- Kopf, J., Cohen, M.F., Lischinski, D., Uyttendaele, M.: ‘Joint bilateral upsampling’, ACM Trans. Graph., 2007, 26, (3), articles no. 96
- Smith, A.R.: ‘Colour gamut transformation pairs’, Comput. Graph., 1978, 12, (3), pp. 12–19
- Peli, E.: ‘Contrast in complex images’, J. Opt. Soc. Am. A, 1990, 7, pp. 2032–2039
- Chou, C.-H., Li, Y.-C.: ‘A perceptually tuned subband image coder based on the measure of just-noticeable-distortion profile’, IEEE Trans. Circuits Syst. Video Technol., 1995, 5, (6), pp. 467–476
- Sezan, M.I., Yip, K.-L., Daly, S.J.: ‘Uniform perceptual quantization: applications to digital radiography’, IEEE Trans. Syst. Man Cybern., 1987, 17, (4), pp. 622–634
- Land, E.H., McCann, J.J.: ‘Lightness and Retinex theory’, J. Opt. Soc. Am., 1971, 61, (1), pp. 1–11
- Li, B., Wang, S., Geng, Y.: ‘Image enhancement based on Retinex and lightness decomposition’. Proc. IEEE Int. Conf. Image Process., 2011, pp. 3417–3420
- Arici, T., Dikbas, S., Altunbasak, Y.: ‘A histogram modification framework and its application for image contrast enhancement’, IEEE Trans. Image Process., 2009, 18, (9), pp. 1921–1935
- Deng, G.: ‘A generalized unsharp masking algorithm’, IEEE Trans. Image Process., 2011, 20, (5), pp. 1249–1261
- Wang, S., Zheng, J., Hu, H., Li, B.: ‘Naturalness preserved enhancement algorithm for non-uniform illumination images’, IEEE Trans. Image Process., 2013, doi: 10.1109/TIP.2013.2261309