现在我们来看一下32是如何启动的:
代码位置:Firmware/build_px4fmu-v2_default/px4fmu-v2/Nuttx/nuttx/arch/arm/src/stm32/stm32_start.c
__start-- #处理器执行的第一条指令(px4使用的是stm32,入口在stm32_start.c中)
|
v
stm32_clockconfig()------ #初始化时钟
|
v
rcc_reset() #复位rcc
stm32_stdclockconfig() #初始化标准时钟
rcc_enableperipherals() #使能外设时钟
------------------------------------------------------------------
stm32_fpuconfig() #配置fpu
|
v
stm32_lowsetup() #基本初始化串口,之后可以使用up_lowputc()
stm32_gpioinit() #初始化gpio,只是调用stm32_gpioremap()设置重映射
up_earlyserialinit() #初始化串口,之后可以使用up_putc()
stm32_boardinitialize()-- #板级初始化
|
v
stm32_spiinitialize() #初始化spi,只是调用stm32_configgpio()设置gpio
stm32_usbinitialize() #初始化usb,只是调用stm32_configgpio()设置gpio
up_ledinit(); #初始化led,只是调用stm32_configgpio()设置gpio
|
----------------------------------------------------------------------------------------------
在stm32_start.c文件中我们会看到这么一句话:
os_start()--------------- #初始化操作系统
|
v
dq_init() #初始化各种状态的任务列表(置为null)
g_pidhash[i]= #初始化唯一可以确定的元素--进程ID
g_pidhash[PIDHASH(0)]= #分配空闲任务的进程ID为0
g_idletcb= #初始化空闲任务的任务控制块
sem_initialize()-- #初始化信号量
|
v
dq_init() #将信号量队列置为null
sem_initholders() #初始化持有者结构以支持优先级继承
|
--------
|
v
up_allocate_heap() #分配用户模式的堆(设置堆的起点和大小)
kumm_initialize() #初始化用户模式的堆
up_allocate_kheap() #分配内核模式的堆
kmm_initialize() #初始化内核模式的堆
task_initialize() #初始化任务数据结构
irq_initialize() #将所有中断向量都指向同一个异常中断处理程序
wd_initialize() #初始化看门狗数据结构
clock_initialize() #初始化rtc
timer_initialize() #配置POSIX定时器
sig_initialize() #初始化信号
mq_initialize() #初始化命名消息队列
pthread_initialize() #初始化线程特定的数据,空函数
fs_initialize()--- #初始化文件系统
|
v
sem_init() #初始化节点信号量为1
files_initialize() #初始化文件数组,空函数
|
--------
|
v
net_initialize()-- #初始化网络
|
v
uip_initialize() #初始化uIP层
net_initroute() #初始化路由表
netdev_seminit() #初始化网络设备信号量
arptimer_init() #初始化ARP定时器
|
--------
|
v
up_initialize()--- #处理器特定的初始化
|
v
up_calibratedelay() #校准定时器
up_addregion() #增加额外的内存段
up_irqinitialize() #设置中断优先级,关联硬件异常处理函数
up_pminitialize() #初始化电源管理
up_dmainitialize() #初始化DMA
up_timerinit() #初始化定时器中断
devnull_register() #注册/dev/null
devzero_register() #注册/dev/zero
up_serialinit() #注册串口控制台/dev/console和串口/dev/ttyS0
up_rnginitialize() #初始化并注册随机数生成器
up_netinitialize() #初始化网络,是arch/arm/src/chip/stm32_eth.c中的
up_usbinitialize() #初始化usb驱动
board_led_on() #打开中断使能led,但很快会被其它地方的led操作改变状态
|
--------
|
v
lib_initialize() #初始化c库,空函数
group_allocate() #分配空闲组
group_setupidlefiles() #在空闲任务上创建stdout、stderr、stdin
group_initialize() #完全初始化空闲组
os_bringup()------ #创建初始任务
|
v
KEKERNEL_THREAD() #启动内核工作者线程
board_initialize() #最后一刻的板级初始化
TASK_CREATE() #启动默认应用程序
|
--------
|
v
forup_idle() #空闲任务循环
|
--------------------
|
v
for(;;) #不应该到达这里
我们看到这里初始化了各种资源,最后进入一个空闲任务,而在空闲任务的前面我们看到对其他任务也进行了初始化。这是在os_bringup.c文件中。
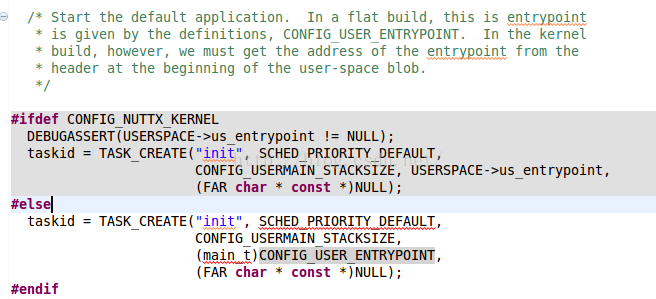
这里是启动默认的应用程序,入口点由CONFIG_USER_ENTRYPOINT给出。
这里就相当于Linux中启动了shell,然后去执行初始化脚本。

进入控制台程序,也就是nsh_consolemain()函数。在这里实际上nsh_initscript和nsh_session都会去执行命令,但是前者是执行启动脚本也就是rcS,后者是执行用户程序。
到了这里我就发现px4飞控主线程都是在脚本中以命令的方式启动的,抛开脚本,单纯看源码是看不出px4飞控主线程是如何启动的。