摘自:https://blog.csdn.net/wbzhang233/article/details/106727276/
PX4学习笔记3: 速度控制
wbzhang233 2020-06-13 07:58:28 251 收藏 2
分类专栏: 自主避障
记录一下PX4在offboard板外模式下用速度控制四旋翼的过程.
参考资料如下:
- PX4板外模式教程
- youtube速度控制小实验
- PX4飞行模式
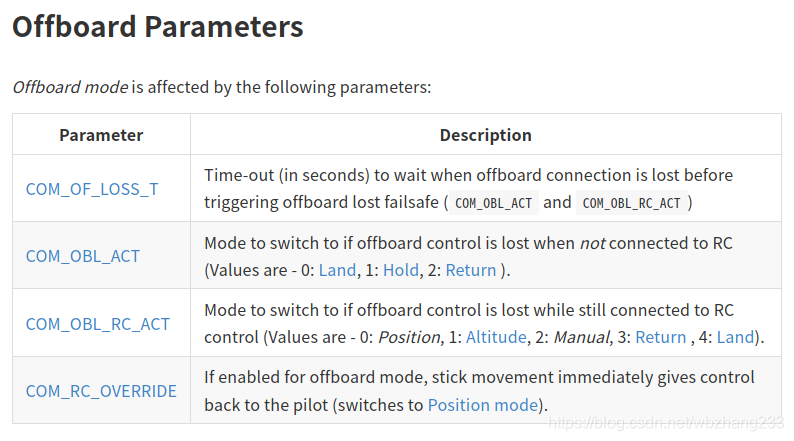
- offboard模式
- offboard模式控制例子
注意:必须2Hz以上的频率发布控制消息,否则PX4则自动由offboard切会返航return模式(一直网往上飞至一定高度后返航,可由以下参数进行调整)
1.mavros话题
详见: mavros话题
四旋翼的控制量主要为[x,y,z,roll,pitch,yaw,vx,vy,vz,wx,wy,wz];也就是位置和姿态以及两者的变化率共12个变量.
其中位置在mavros中包括global和local两种,global指的是经纬高LLA,通常会转化成东北天ENU,local指得是在Gazebo坐标系下的坐标和姿态(xyzw四元数表示). 通常可以使用发布local坐标的位置进行控制, 也可以使用速度控制. 话题如下:
以下为local坐标控制: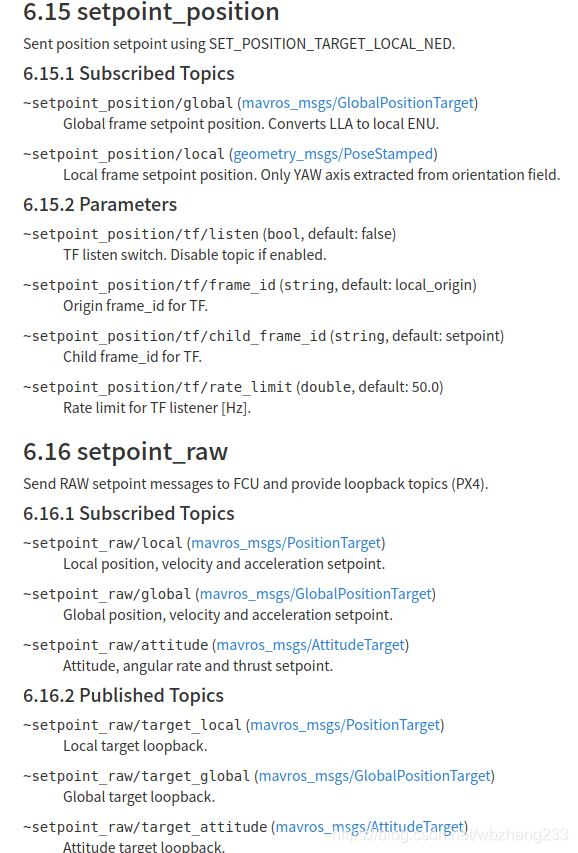
以下为速度控制:
2.youtube速度控制小实验
详见本文摘要参考链接2.
主要分为一下几步:
- 启动PX4在Gazebo中的SITL
- 发布位置控制消息,同时打开QGC地面站,切换到Offboard模式
- 发布速度控制消息,停止发布位置控制消息
- PX4飞机将以发布的速度消息飞行.
# 参考: https://www.youtube.com/watch?v=2jksI-S3ojY
## 1.发送位置
rostopic pub -r 20 /mavros/setpoint_position/local geometry_msgs/PoseStamped "header:
+ 'Tab键'+光标输入改变数字 "
## 2.切换到Offboard模式
rosrun mavros mavsys mode -c OFFBOARD
# 解锁
rosrun mavros mavsafety arm
## 3.发送速度
rostopic pub -r 20 /mavros/setpoint_velocity/cmd_vel_unstamped geometry_msgs/Twist "linear:
+ 'Tab键'+光标输入改变数字 "
### 关闭发布位置的终端,飞机将以速度消息控制飞行.
3.body frame下的速度控制
以上速度和位置控制都是在NED坐标系下的,在gazebo的SITL仿真中即为设置在gazebo坐标系的xyz方向的分量。要使用机体系下的速度控制,先给出参考:
机体系速度控制1
机体系速度控制2
body_frame_vel
机体系速度控制3
offboard_avoidance
setpoint_raw/local消息如下:
其中各个变量含义如下:
坐标系选择
uint8 coordinate_frame表示坐标系; 、
、
1和7分别表示LOCAL的北东地坐标系和offset,8和9分别表示机体坐标系和offset。
控制变量选择
uint16 type_mask 表示要控制变量的忽略码字。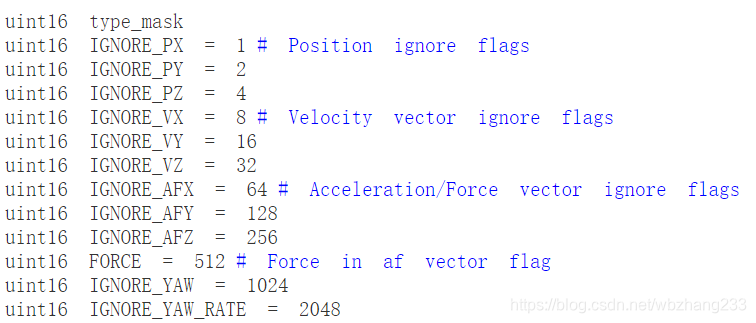
共12位,如果要忽略多位,只需要将对应的码相加即可。
如速度控制的码字应该是111,111,000,111等于2*2048-1-8-16-32=4039。
速度控制加上偏航角控制应该是:101,111,000,111等于3015
位置控制的码字应该是111,111,111,000,等于4088.
或者参考以下问题中的写法:https://github.com/mavlink/mavros/issues/909
like this:
while(ros::ok() && !this->manual){
mavros_msgs::PositionTarget velocity_msg;
velocity_msg.coordinate_frame = mavros_msgs::PositionTarget::FRAME_BODY_NED;
velocity_msg.header.frame_id = "drone";
velocity_msg.type_mask = mavros_msgs::PositionTarget::IGNORE_PX |
mavros_msgs::PositionTarget::IGNORE_PY |
mavros_msgs::PositionTarget::IGNORE_PZ |
mavros_msgs::PositionTarget::IGNORE_AFX |
mavros_msgs::PositionTarget::IGNORE_AFY |
mavros_msgs::PositionTarget::IGNORE_AFZ |
mavros_msgs::PositionTarget::FORCE |
mavros_msgs::PositionTarget::IGNORE_YAW |
mavros_msgs::PositionTarget::IGNORE_YAW_RATE ;
velocity_msg.header.stamp = ros::Time::now();
velocity_msg.velocity.x = this->xs;
velocity_msg.velocity.y = this->ys;
velocity_msg.velocity.z = this->zs;
if(this->testen){
velocity_msg.velocity.x = 0.0;
velocity_msg.velocity.y = -0.4;
velocity_msg.velocity.z = 0.0;
}
大佬还是很多。参考:
控制节点的学习案例
机体系速度的学习案例2