利用霍夫圆变换HoughCircles()函数进行圆检测。
API函数
void HoughCircles(InputArray image,//输入图像,8位的单通道灰度图
OutputArray circles,//检测圆的输出矢量,每个圆由包含了3元素浮点型的向量(x,y,r)
int method,//检测方法,看 cv::HoughModes里面
double dp,//如果dp=2,累加器是输入图像一半的高度和宽度
double minDist,//圆心之间的最小距离,如果太小多个相邻圆可能被错误的检测成一个
//重合圆。如果太大,某些圆可能检测不出来。
double param1 = 100,//Canny算子的高阈值,低阈值为它的一半
double param2 = 100,//最小投票数,越小,越多假的圆被检测出来。
int minRadius = 0, int maxRadius = 0);//默认一、c++示例代码
//包含头文件
#include <opencv2/opencv.hpp>
//命名空间
using namespace cv;
using namespace std;
//全局函数声明部分
//主函数
int main()
{
//【1】载入图像
Mat image = imread("F:\\opencvtest\\testImage\\car.jpg");
//【2】检查是否载入成功
if (image.empty())
{
printf("读取图片错误,请确认目录下是否有imread函数指定图片存在! \n ");
return 0;
}
//【3】转换为灰度图像
Mat grayImage;
cvtColor(image, grayImage, COLOR_BGR2GRAY);
//【4】图像平滑降噪
GaussianBlur(grayImage, grayImage, Size(9,9), 2, 2 );
//【5】霍夫圆变换、圆检测
vector<Vec3f> circles;
HoughCircles(grayImage, circles, HOUGH_GRADIENT, 1, 20, 80, 100);
//【6】迭代器遍历向量,circle()函数绘制圆
std::vector<Vec3f>::const_iterator it = circles.begin();
while (it != circles.end())
{
Point center((*it)[0], (*it)[1]);
int radius = (*it)[2];
//绘制圆心
circle(image, center, 3, Scalar(0,255,0), -1, 8, 0);
//绘制圆轮廓
circle(image, center, radius, Scalar(0,0,255), 3, 8, 0);
++it;
}
//【7】显示图像
imshow("19-圆检测图", image);
//【8】保持窗口显示
waitKey(0);
return 0;
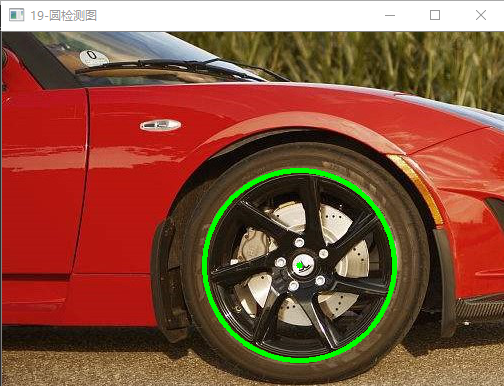
}二、运行截图
1,圆检测图