void getConcaveHull(PointCloud::Ptr& cloud,const pcl::PointCloud<PointXYZ>::Ptr &hull)
{
if(cloud->points.size()<3)
{
return ;
}
PointCloud ::Ptr cloud_filtered(new PointCloud());
downSample(cloud,cloud_filtered);
// 创建凹包提取对象
pcl::ConcaveHull<PointSany> chull;
chull.setDimension(2);
chull.setInputCloud(cloud_filtered);
chull.setAlpha(1.0); // 设置凹包提取的参数
// 提取凹包点
chull.reconstruct(*hull);
}
其中PointCloud为点云模板
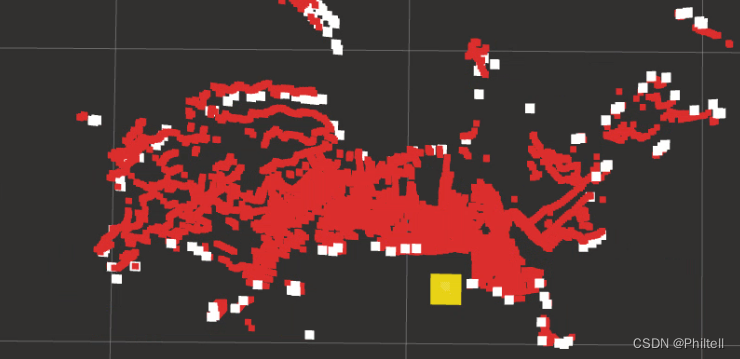
效果图如下图所示
白色点为凸包点,红色点为原始点云点。