接上篇内容,这里讲述利用tf卡镜像对小车进行操作
自主搭建智能车
(一)烧录系统镜像
后续会将镜像文件放上 —夸克网盘
链接:https://pan.quark.cn/s/9ffc6eb10e65
1.1烧录TF卡镜像
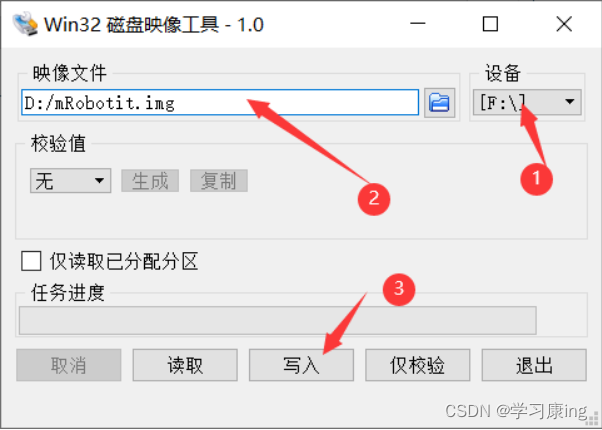
将32G TF卡装入读卡器,插入笔记本电脑,使用Win32磁盘镜像工具(Win32DiskImager_v
1.0)将镜像文件“mRobotit.img”写入TF卡,如下图所示。等待完成后退出。
1.2 修改WiFi开机启动配置文件
打开VirtualBox虚拟机,正常启动Ubuntu并进行桌面,如下图:

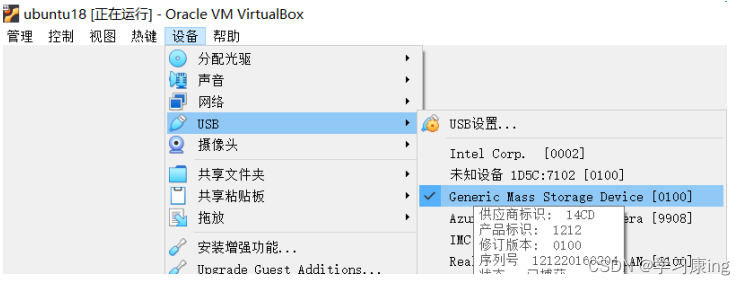
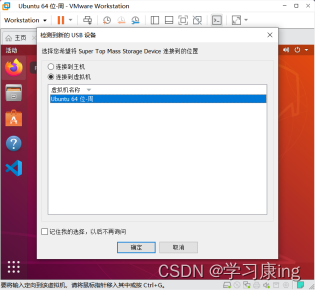
将安装有TF卡的读卡器插入电脑,在VirtualBox虚拟机的菜单栏勾选“USB/Generic Mass
Storage Device”,将TF卡连接到虚拟机,如下图所示:
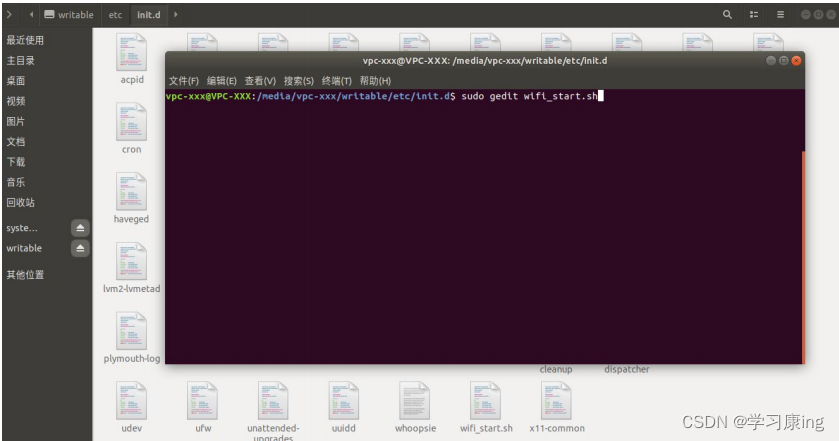
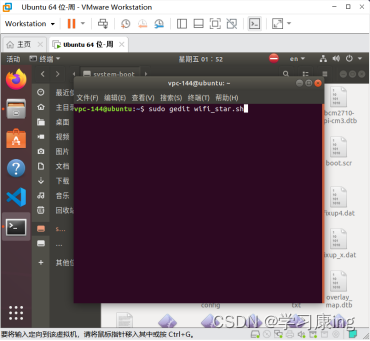
在TF卡的“etc/init.d”目录下打开终端,输入如下命令,编辑“wifi_start.sh”文件:
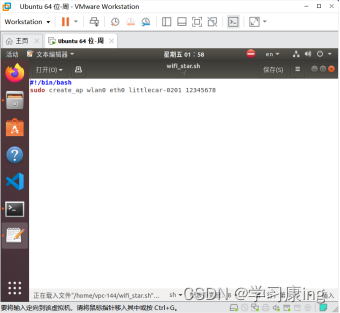
将“sudo create_ap wlan0 eth0 littlecar 12345678”修改为“sudo create_ap wlan0 eth0 littlecar-XX 12345678”,如下图所示。保存后关闭文件。
这里的littlecar-XX是后续你的wifi

(二)运行测试
将TF卡插入小车的树莓派4B主板,如下图所示:

打开小车电源开关,等待小车进行系统,并开启无线热点。在个人电脑的无线网络中,找到名为“littlecar-XX”的无线网络并加入,密码为“123
45678”,如下图所示。

利用Xshel软件,远程连接mRobotit小车的Ubuntu系统,如下图所示:
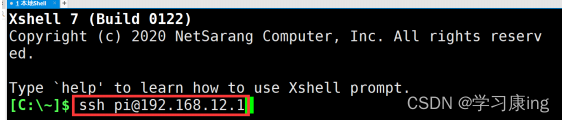
在然后的窗口中输入密码“ubuntu”,如下图所示:
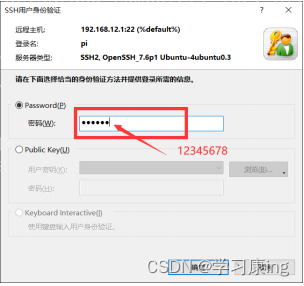
如果连接成功,将出现如下结果:

输入如下命令:

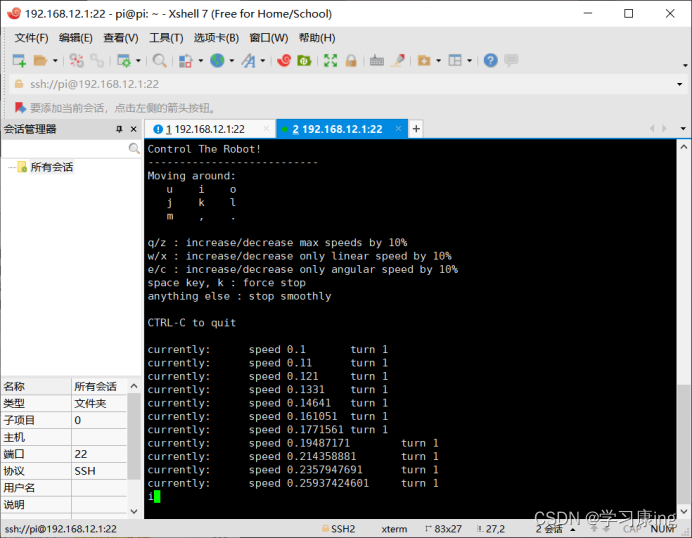
重新建立一个SSH连接,再如下命令,启动键盘控制节点:

运行成功后,可以使用如下键盘按键控制小车运动:
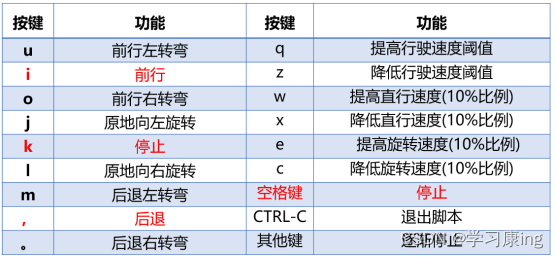
这里基本上就运行成功了,不知道你的小车是否运行成功了呢。
这里是我安装小车的一些图片以及用ros操作的过程图片:
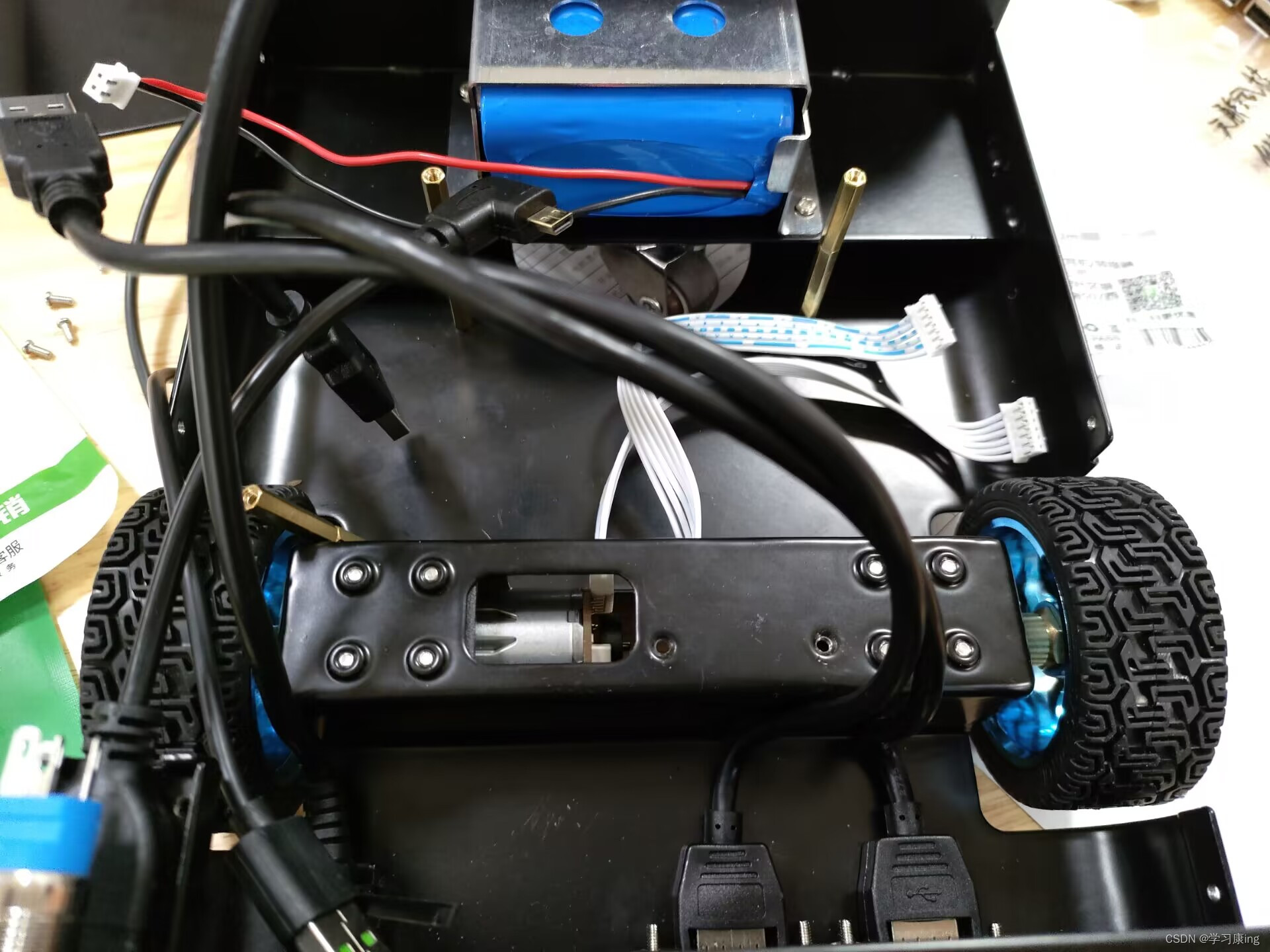
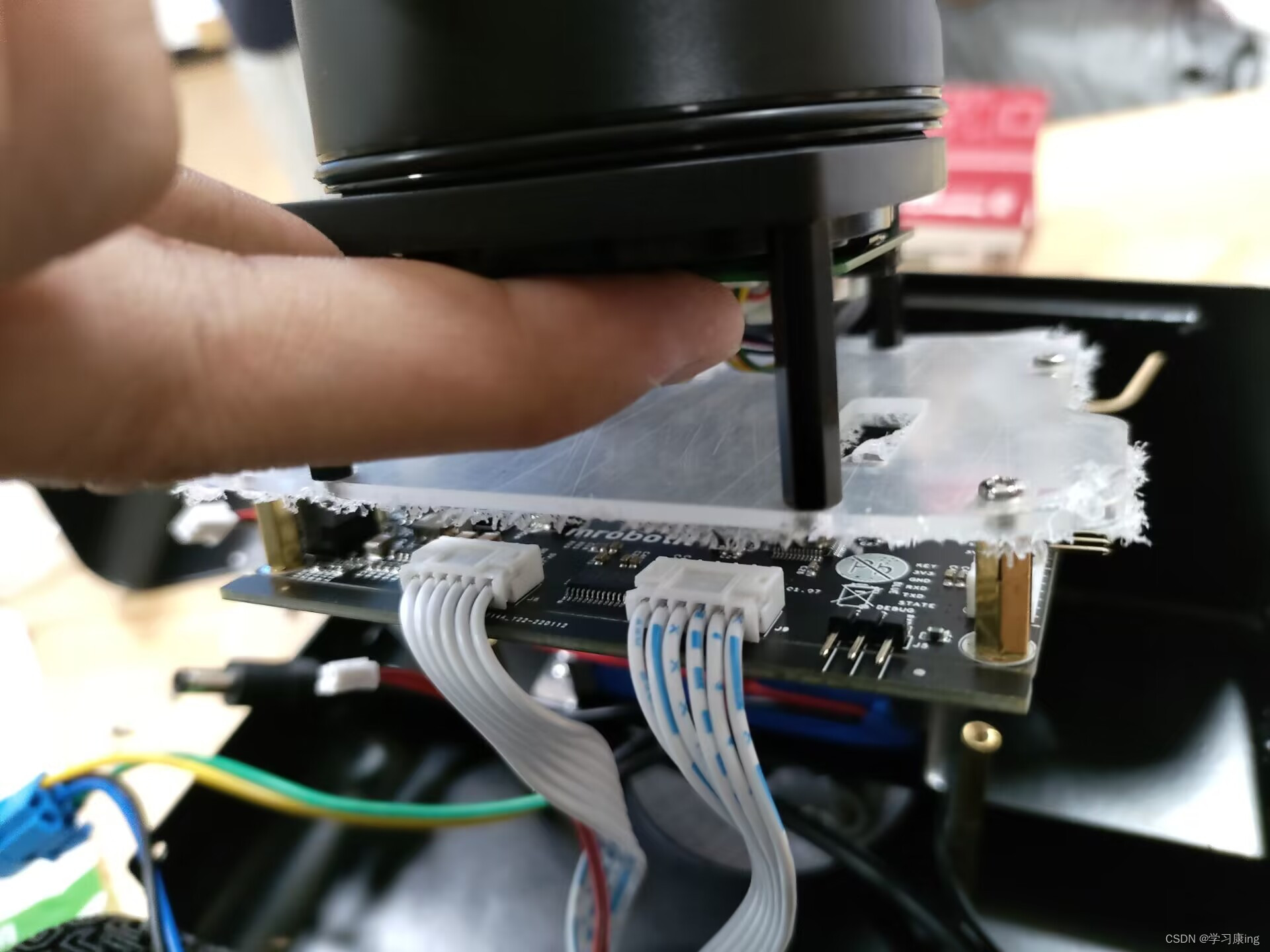
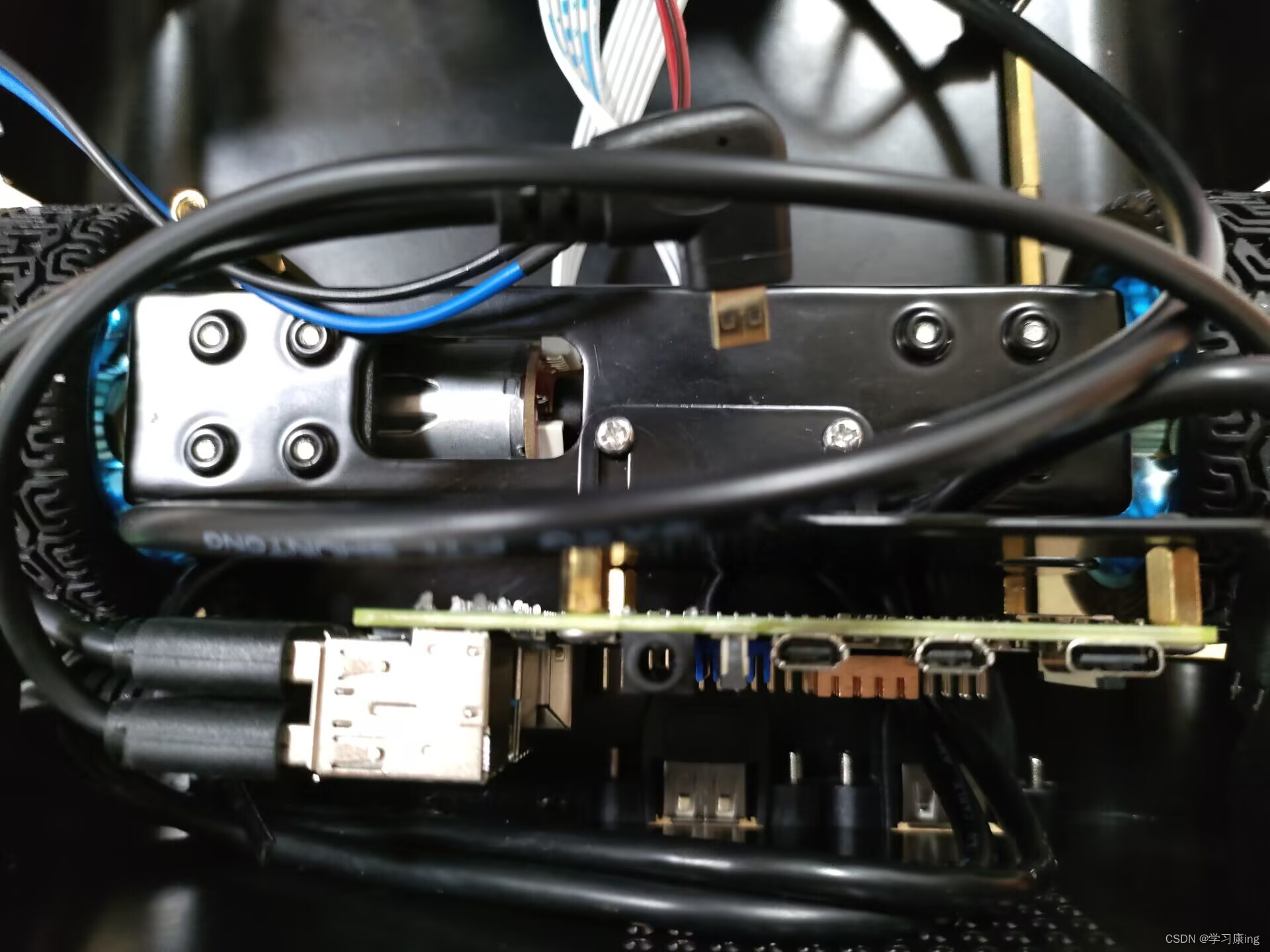
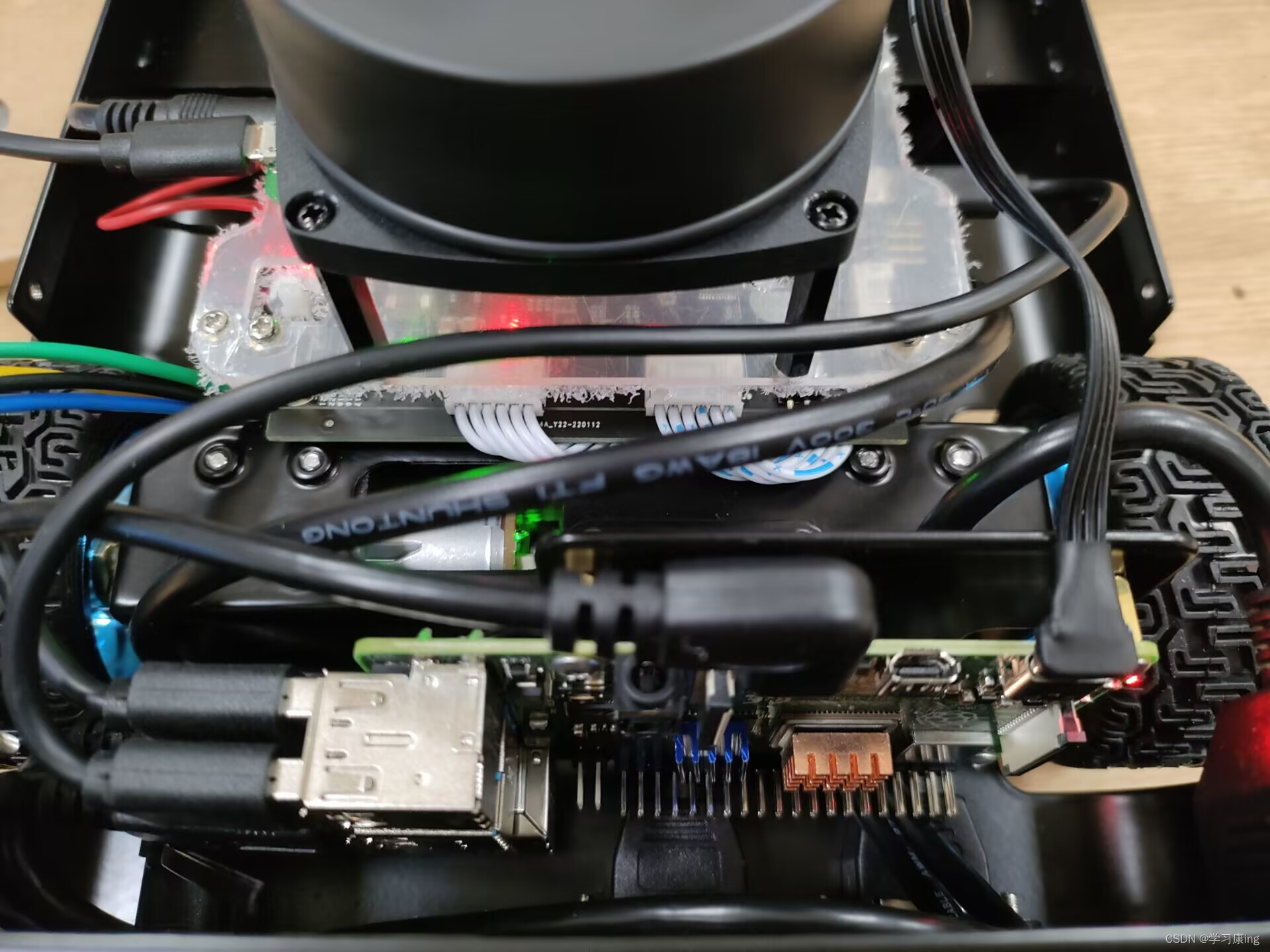
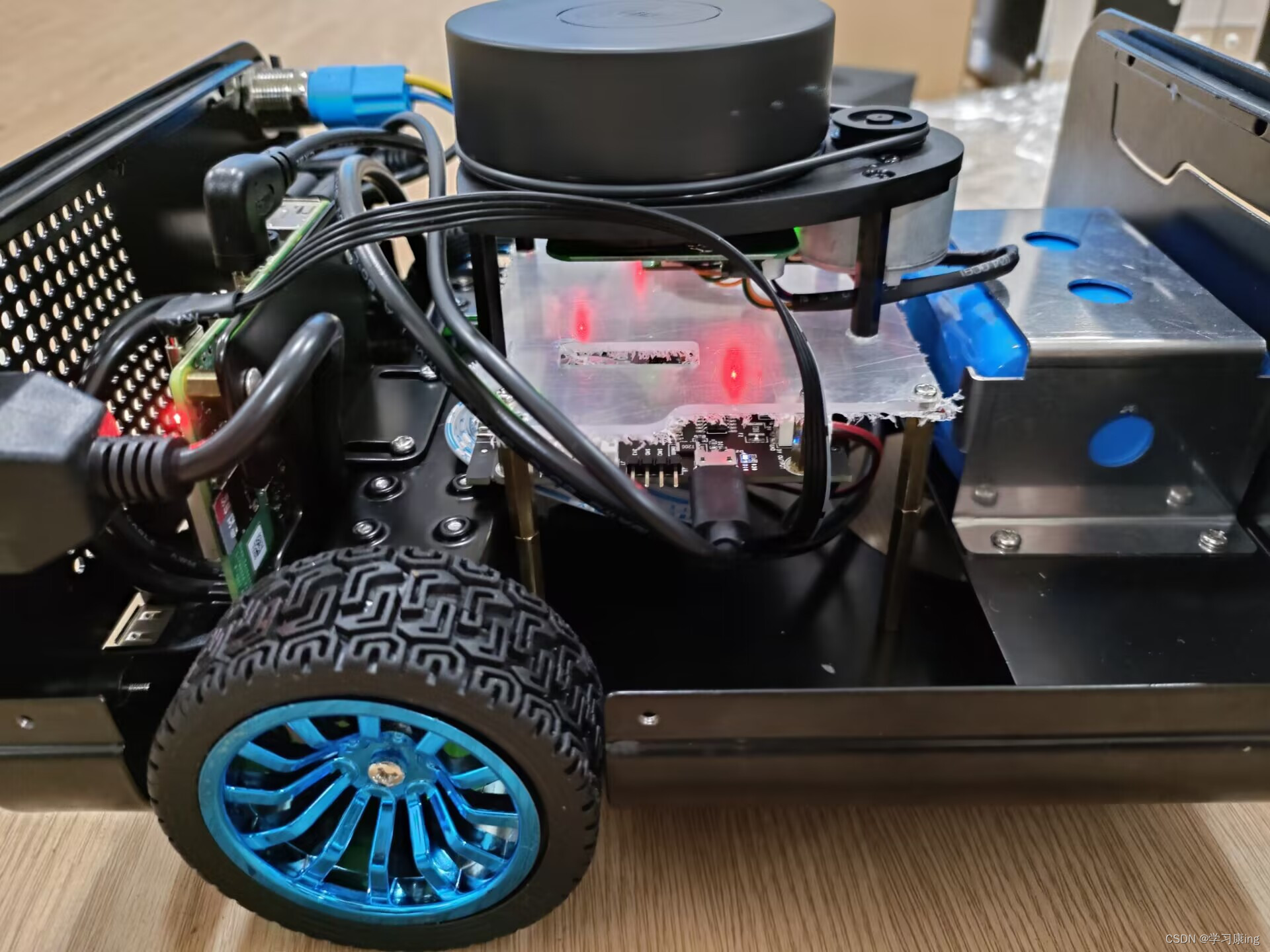
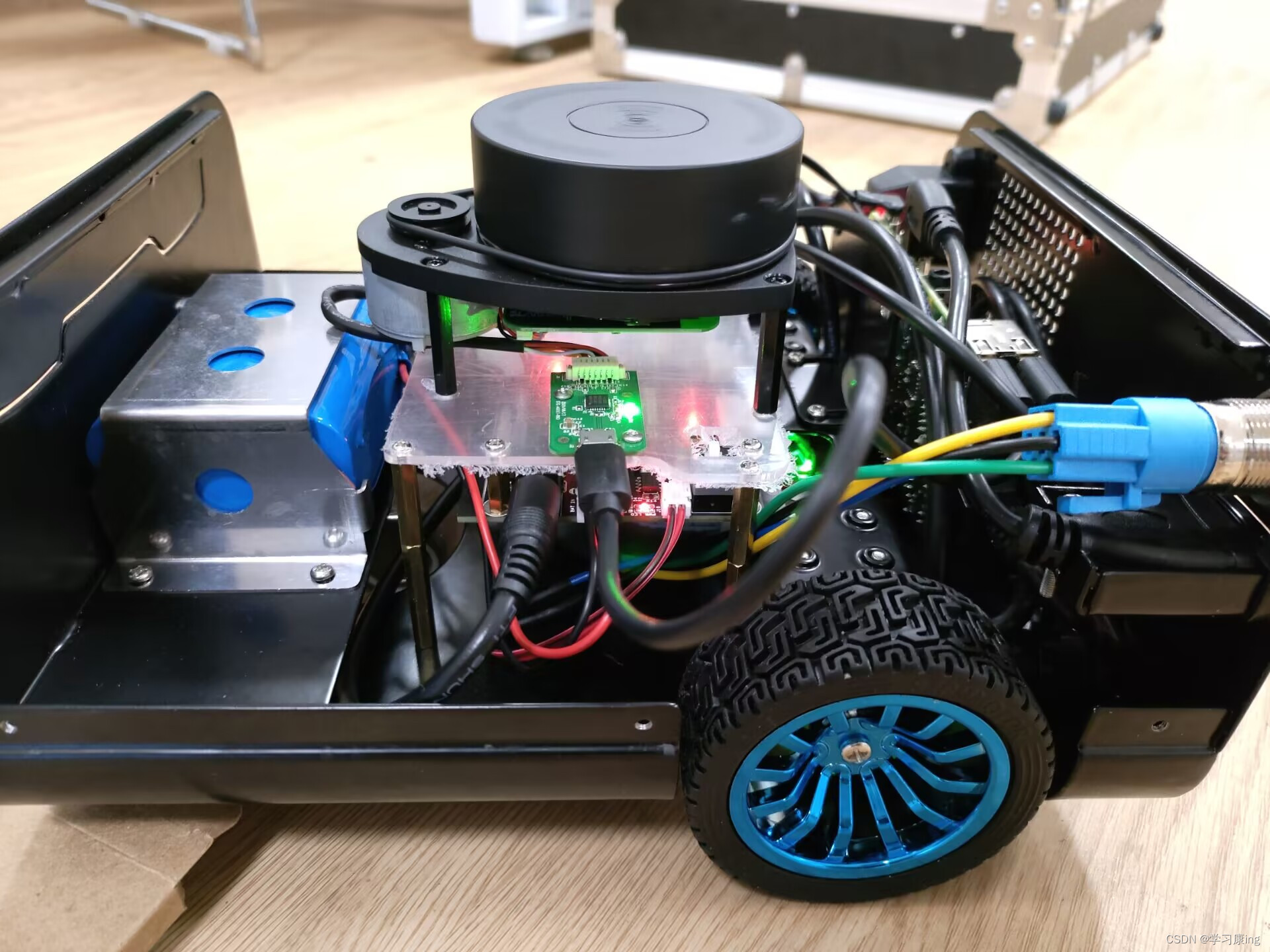
我的小车是能运行了,你的呢?

下面是ros的环节:
整个实验是我和一个朋友一同完成的,分工合作,我主要是负责装车,他主要负责是对其镜像文件进行处理和连接。
大家想想,现在只是控制车子的移动,试想,再将其装一个摄像头或者自感雷达是什么体验呢?