标定示意图
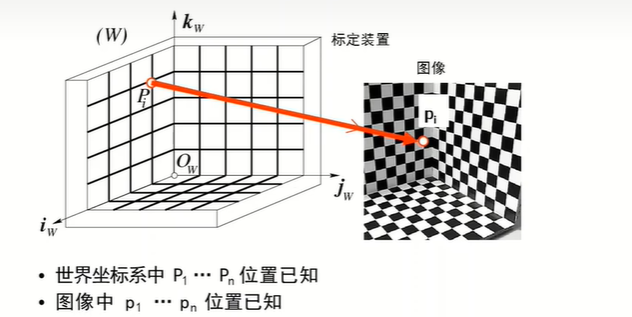
标定目标
P ′ = M P w = K [ R T ] P w P^{'}=MP_w=K[R \space T]P_w P′=MPw=K[R T]Pw
其中 K K K为内参数, [ R T ] [R \space T] [R T]为外参数。该式子需要使用至少六对内外点对进行求解内外参数(11个未知参数)。
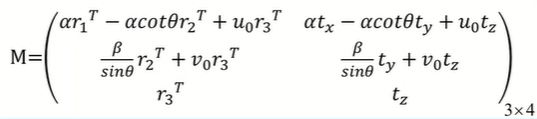
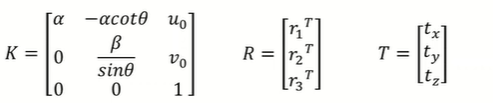
其中 R 3 × 3 , T 3 × 1 R_{3 \times 3}, T_{3 \times 1} R3×3,T3×1.
标定求解
- 使用齐次线性方程组
方程数量大于未知参数数量,求解近似解。
径向畸变标定
- 图像放大率随距光轴距离的增加而减少
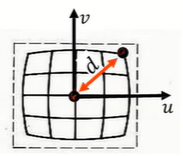
与常规求解,加入畸变因子:
λ = 1 ± ∑ p = 1 3 K P d 2 p d 2 = u 2 + v 2 \lambda =1\pm \sum_{p=1}^{3} K_P d^{2p}\\ d^2=u^2+v^2 λ=1±p=1∑3KPd2pd2=u2+v2
利用牛顿法和 L − M L-M L−M方法进行求解。