三维重建——摄像机几何
一、针孔摄像机
原理:小孔成像

我们会发现,这样的话胶片哪里对应的一个点可能会有很多个物体映射的点,所以我们可以在物体与胶片之间加一块带针孔的隔板,这样的话,物体每一个点在胶片上只有对应一个点。(但是小孔成像是等大反向的!)
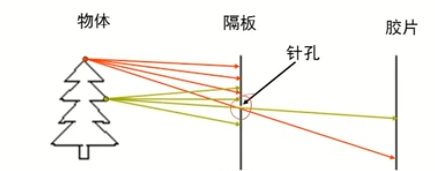
如下图:

三维重建所分析的一般都是与真实图相似的虚拟相平面,而相平面是一个反向的,这个基本没有啥区别,在最后只需要适当的调整即可。

接下来我们分析真实位置与像平面之间的位置关系:
(像平面是二维,空间是三维的,我们利用相似把其z轴上的位置替换,用二维的坐标进行替换)
这里我们利用的就是数学上简单的相似问题。像平面主要是在焦距位置上成像,我们利用相似就可以得到像x,y的位置。上图只表达了像平面上y的表达,至于x的表达我想就是依葫芦画瓢了。
针孔摄像机的光圈作用::
光圈越小越清晰但也更暗,光圈越大越模糊但也更明亮。这样的话我们在考虑清晰的情况下我们便要想办法来增大成像的亮度。这时候我们便需要用到透镜了。
二、透镜
**作用原理:**将物体辐散出的光线聚焦到胶片上的一个点上面,这样的话,光线的数量多了,光的亮度也就大了,这样就可以比较有效的解决缩小光圈,亮度减小的问题了。
特性: 1、所有平行于光轴的光线都会汇聚到一个点——焦点,焦点到透镜中心的距离成为焦距。
2、穿过中心的光线的方向不发生改变。
近轴折射模型;
f:焦距,**z’**小孔到像平面的距离
真实位置与像平面的转化关系在图中。
问题:
1、失焦:物体聚焦是有特定的距离的——焦距,如果你的物体投过去的位置超过或者小于的话,那么可能就不可以清晰的在胶片上展示了。
2、径向畸变:图像像素点以畸变中心为中心点,沿径向产生的位置偏差,从而导致图像中所成的像发生畸变
产生原因:光线在远离透镜中心的地方比靠近中心的地方更加弯曲
枕型畸变:沿径向向外发生偏移
桶形畸变:沿径向向中心发生偏移
三、像平面、像素、世界坐标系的关系
1、像平面------>像素平面
像平面的单位:米(m),像素平面的单位:像素(pixel)
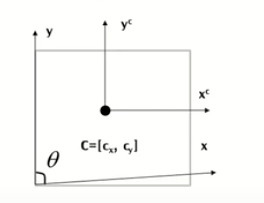
两个平面的坐标中心一般也不一样,

上图是一个偏置的问题,将一个空间中三维坐标转化为像素二维坐标中,并且单位和坐标原点都有变化。(Cx,Cy是摄像机的内部参数)。
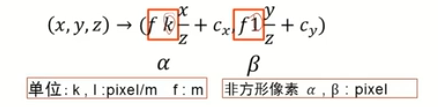
这里,讲的是将单位的转化,可能会有疑问,一个fk,一个fl是什么情况,这就和摄像机制作的工艺有关了,如果工艺好的话,那么可能k会等于l,但是一般都会有偏差,这个具体要参考摄像机的参数。
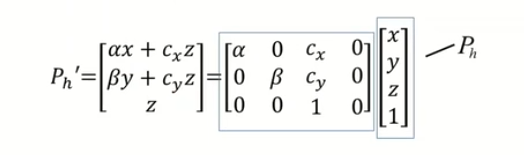
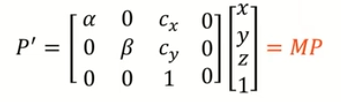
一般简化的话,我们把fk用α表示,fl用β表示,如下图:

这个就是一个空间坐标与像素坐标的映射公式了。
随说上面的公式看起来是线性的,但是,仔细一看,x,z,y都是变量,所以说,这就不是一个线性关系了。
齐次坐标与欧式坐标的转化:

由图片可以知道,这个就是通过线性代数的一些基本知识来进行转化,借此来方便后面的计算与表达。
这样,我们便可以将空间中的点转化成像品面上的点用齐次坐标来表示了:
也可以写成这样:
这里的M表示的是投影矩阵,之前也讲到了两个平面是不一样的,这样的话需要一个关系来将他们两联立起来,搭建一种关系来进行转化。我们可以看上面的α、β,cx,cy都是固定的,所以说他说是一个固定的矩阵。但是,这也不一定是固定的,如下图:
我们发现,这个摄像机是倾斜的,导致像素坐标系的两个坐标轴不垂直,这时候就要考虑夹角不是90°的情况了。

这个时候投影矩阵就可以写成这种形式了,当然,这个时候它又由了一个新的名字:摄像机的内参数矩阵(因为它是由摄像机的工艺决定的)
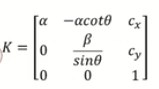
这个内参数矩阵由α,β,角度,cx,cy5个自由度。
世界坐标系: 我们在对一个物体进行运动描述的时候,我们都知道,如果我们采用不同的参考系的话,那么我们可能得到的描述可能不一样,这时候我们需要一个能够统一描述的参考系,而世界坐标系就是用来解决这样的问题的。
这时候我们就要考虑如何在像素坐标系与世界坐标系建立联系了

Pw是世界坐标系中的点,P‘是像素坐标系中的点的齐次坐标,P是摄像机坐标上的点,这个就是需要转化、替换等等,如将齐次坐标系P带入P’中去。
内参数:摄像机的点到像素坐标系中的映射。
外参数:摄像机与世界的关系。
三维的内部参数矩阵中的R、T各有三个自由度,再加上内部参数的5个自由度,我们可以发现投影矩阵M由11个自由度。
欧式坐标如下:

上面的m1、m2、m3都是投影矩阵。

图片资料来自于B站视频。