目录
一、注意
Robocup3D仿真平台对环境的要求极为苛刻,本人一开始使用 Ubuntu20.04 配置环境时遇到各种各样的问题,最后因能力有限还是无奈放弃。因此初学者最好使用 Ubuntu18.04LTS 或者 ubuntu16.04LTS 来搭建仿真环境。
二、Tips
1.所有 $ 符号表示 shell 命令的开始,不用输入。
2.请使用 Ubuntu16.04 或者 Ubuntu18.04 版本,本文用 Ubuntu18.04 顺利配置了仿真环境。
3.安装时请保持网络状况良好,如果有条件的话建议科学上网,其中第 1,2,3,6 步骤命令都涉及大量下载操作,若此类步骤失败多为网络问题导致。
4.命令中 cd 命令均以默认路径为例,若路径变动可自行修改。
5.各步骤之间存在依赖关系,请严格按照 1~10 先后顺序安装。
三、步骤
1、安装编译环境
打开终端,开始依次输入以下命令:
$ sudo apt-get update
$ sudo apt-get install g++
$ sudo apt-get install subversion
$ sudo apt-get install cmake
$ sudo apt-get install build-essential 或者也可以这样,分别执行下面两个命令:
$ sudo apt-get update$ sudo apt-get install g++ subversion cmake build-essential 2、安装依赖库
单步执行下面命令:
$ sudo apt-get install libfreetype6-dev
$ sudo apt-get install libode-dev
$ sudo apt-get install libsdl-dev
$ sudo apt-get install ruby
$ sudo apt-get install ruby-dev
$ sudo apt-get install libdevil-dev
$ sudo apt-get install libboost-dev
$ sudo apt-get install libboost-thread-dev
$ sudo apt-get install libboost-regex-dev
$ sudo apt-get install libboost-system-dev
$ sudo apt-get install qt4-default
或者一次性执行:
$ sudo apt-get install libfreetype6-dev libode-dev libsdl-dev ruby
ruby-dev libdevil-dev libboost-dev libboost-thread-dev libboost-regex-
dev libboost-system-dev qt4-default 3、下载simspark源码包
$ svn co https://svn.code.sf.net/p/simspark/svn/trunk simspark 下载成功后终端将显示版本号(这里能科学上网比较好)。
4、编译 simspark 源码并安装
4.1 编译安装 spark
$ cd ~/simspark/spark
$ mkdir build
$ cd build
$ cmake ..
$ make
$ sudo make install
$ sudo ldconfig 4.2 编译并安装 rcssserver3d
$ cd ~/simspark/rcssserver3d
$ mkdir build
$ cd build
$ cmake ..
$ make
$ sudo make install
$ sudo ldconfig
5、尝试运行
终端输入:rcsoccersim3d
能打开球场则初步安装成功,可以进行下面步骤。
6、安装 jdk
$ sudo apt-cache search jdk
$ sudo apt-get install openjdk-8-jdk 7、下载 roboviz 源码包
https://github.com/magmaOffenburg/RoboViz![]() https://github.com/magmaOffenburg/RoboViz自行下载后解压到 home 目录(**注意必须将 RoboViz-master 整个文件夹解压到当前的 home 下,否者后续步骤会出错**)
https://github.com/magmaOffenburg/RoboViz自行下载后解压到 home 目录(**注意必须将 RoboViz-master 整个文件夹解压到当前的 home 下,否者后续步骤会出错**)
8、编译 roboViz 源码
$ cd ~/RoboViz-master/scripts
$ chmod +x *
$ ./build.sh(注意,这里的build.sh是根据scripts文件夹中的文件名称来的,比如有时候可能是linux-amd64,请根据scripts文件夹里面的内容灵活更改)9、关联 roboviz
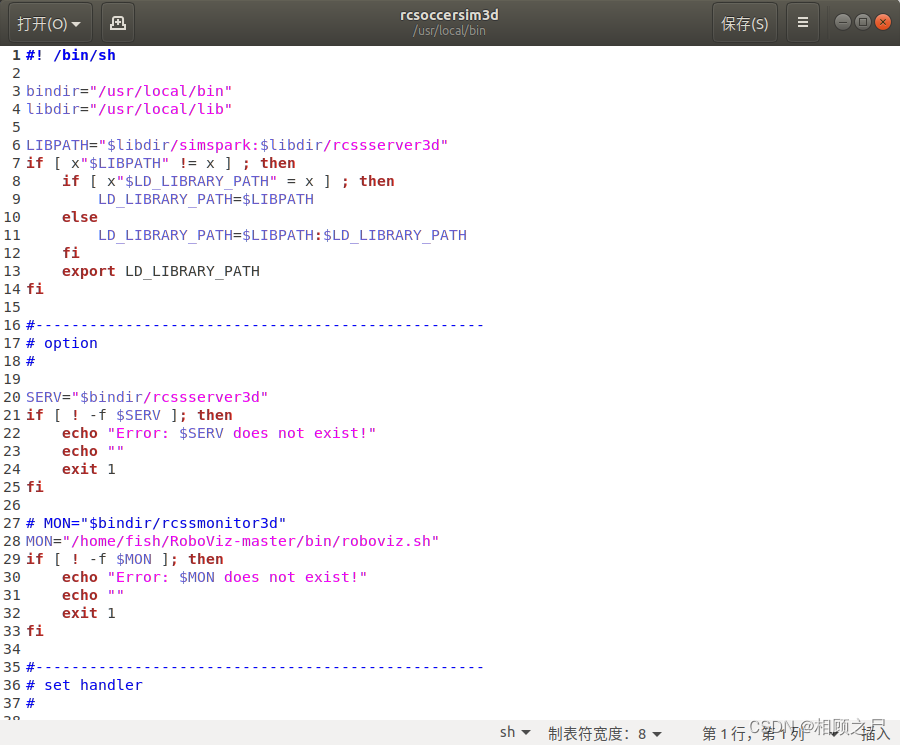
$ sudo gedit /usr/local/bin/rcsoccersim3d 输入命令后出现记事本
在找到记事本第 27行,在第 27行前用“#”注释
然后在 27行下面新增一行内容为:
MON=“/home/用户名/RoboViz-master/bin/roboviz.sh”,这里路径中的文件名都要以最新的文件名为标准灵活修改,如下图所示:
10、测试 roboviz
$ rcsoccersim3d 出现如下画面:
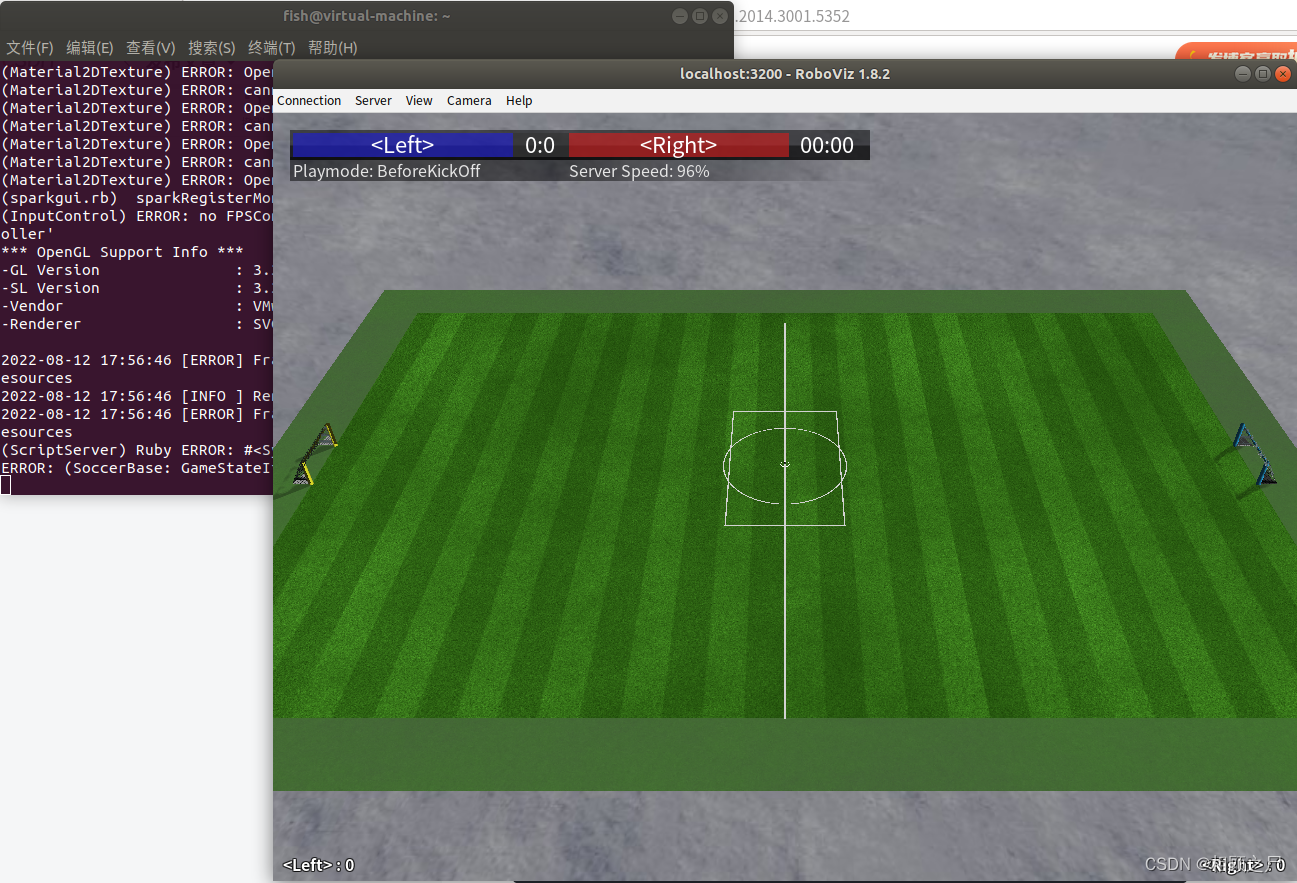
球场界面比第5步打开时更加清晰。
至此,Robocup3D 仿真环境配置完成。