ROS最早的设计目标就是开发这样一款PR2家庭服务机器人,这款机器人绝大部分时间都是独立工作,为了让他具备充足的能力:
它搭载了工作站级别的计算平台和各种先进的通信设备,不用担忧算力不够,有足够的实力支持各种复杂的实时运算和处理;
由于是单兵作战,通信绝大部分都自己内部完成,那就可以用有线连接,保证了良好的网络连接,没有丢数据或者黑客入侵的风险;
这台机器人最终虽然小批量生产,但是由于高昂的成本和售价,也只能用于学术研究。

系统架构进行了颠覆性的变化: ROS1中所有节点都需要在节点管理器ROS Master的管理下进行工作,一旦Master出现问题,系统就面临宕机的风险,ROS2实现了真正的分布式,不再有Master这个角色,借助一种全新的通信框架DDS,为所有节点的通信提供可靠保障。
软件API进行了重新设计,ROS1原有的接口已经无法满足需求,ROS2结合C++最新标准和Python3语言特性,设计了更具通用性的API,虽然导致原有ROS1的代码无法直接在ROS2中运行,但是尽量保留了类似的使用方法,同时提供了大量移植的说明。
编译系统进行了升级,ROS1中使用的rosbuild和catkin问题诸多,尤其是针对代码较多的大项目以及Python编写的项目,编译、链接经常会出错,ROS2对这些问题也进行了优化,重新优化后的编译系统叫做ament和colcon,大家在后续的课程中就会体验到新版编译器的使用方法。
ROS2 vs ROS1
系统架构
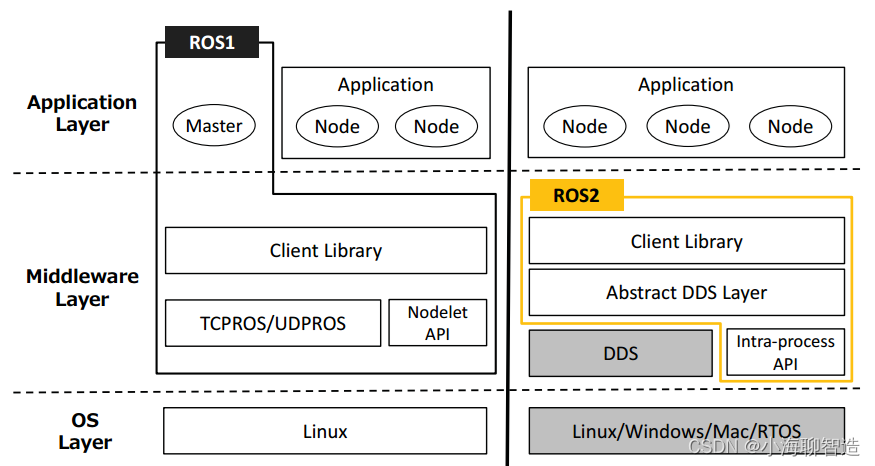
在这张图中,左侧是ROS1,右侧是ROS2,大家注意看两者最明显的变化,那就是Master。
在ROS1中,应用层里Master这个节点管理器的角色至关重要,所有节点都得听它指挥,类似是一个公司的CEO,有且只有一个,如果这个CEO突然消失,公司肯定会成一团乱麻。ROS2把这个最不稳定的角色请走了,节点可以通过另外一套discovery——自发现机制,找到彼此,从而建立稳定的通信连接。
中间层是ROS封装好的标准通信接口,我们写程序的时候,会频繁和这些通信接口打交道,比如发布一个图像的数据,接收一个雷达的信息,客户端库会再调用底层复杂的驱动和通信协议,让我们的开发变得更加简单明了。
在ROS1中,ROS通信依赖底层的TCP和UDP协议,而在ROS2中,通信协议更换成了更加复杂但也更加完善的DDS系统。
如果是在进程内需要进行大量数据的通信,ROS1和ROS2都提供了基于共享内存的通信方法,只不过名字不太一样而已。
最下边是系统层,也就是可以将ROS安装在哪些操作系统上,ROS1主要安装在Linux上,ROS2的可选项就很多了,Linux、windows、MacOS、RTOS都可以。
通过这样对比的方式,我们了解了ROS2的整体架构,如果大家有接触过ROS1,这个框架应该并不难理解,如果大家是从ROS2开始学习,先大致有一个印象,通过后续的学习,就会有更加深入的理解。
DDS通信
ROS2相比ROS1最大的变化,除了省略了Master之外,应该就是通信系统的变化了。ROS1中基于TCP/UDP的通信系统,频繁诟病于延迟、丢数据、无法加密等问题,ROS2中的DDS在通信层面的功能就丰富多了。
核心概念
ROS1应用已经非常广泛,全球有几百万开发者,大家已经熟悉了ROS1的开发方式以及其中的很多概念。ROS2尽量保留了这些概念,便于开发者从ROS1迁移到ROS2。

我们把ROS2和ROS1做了对比,总结而言就是:
节点干掉了Master
通信换成了DDS
核心概念没变化
编程难度有上升