梯度计算
[Note] 边缘检测的原理就是寻找像素值变化剧烈的点当作边缘
如何寻找变化剧烈的点?
以下分成两种情况:
一维
假如有这么一个数组
那么我们利用差分(Diff)来求解两点之间的变化程度,从而得出某点的梯度值。
例如,我们要算的梯度值,我们只需计算
即可 。
因此,当图片是一维的时候,的梯度等于
。
二维
假如有这么一个数组:

那么我们就要用二维差分来算某点的梯度。
二维差分包括和
。
如果我们要计算的梯度,我们先算出
和
。
然而这样的计算方法只考虑了两个方向的梯度:
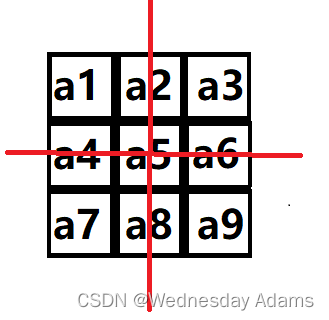
因此,后面又推出了改进版,即考虑4个方向的梯度计算方法:
