1、首先下载usb-cam的ros驱动源码(已经可以驱动单个摄像头的可以忽略第1步,直接看第2步)
代码链接:https://github.com/ros-drivers/usb_cam![]() https://github.com/ros-drivers/usb_cam
https://github.com/ros-drivers/usb_cam
并将代码复制到你的ros工作空间,没有ros工作空间需要先创建,关于如何创建ros工作空间可以参考我另一篇博客:
https://blog.csdn.net/qq_49959714/article/details/127028396?spm=1001.2014.3001.5502
进入到工作空间执行catkin_make编译一下。
执行下面命令即可启动单个摄像头:
source devel/setup.bash
roslaunch usb_cam usb_cam-test.launch2、同时启动多个摄像头
这里需要对相应的文件进行配置
1)编写子launch
比如说我这里有7个摄像头,那么就需要编写7个子launch
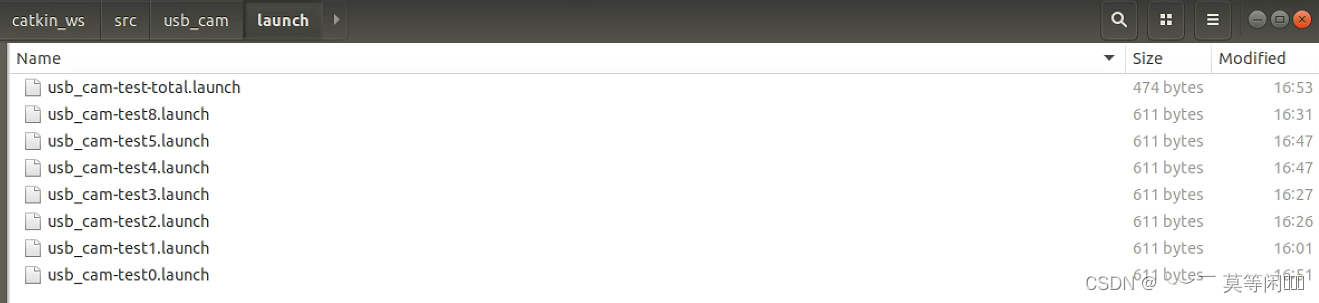
直接复制原来的usb_cam-test.launch进行修改
具体修改内容如下红框:

2)编写总launch文件
把子launch添加进来

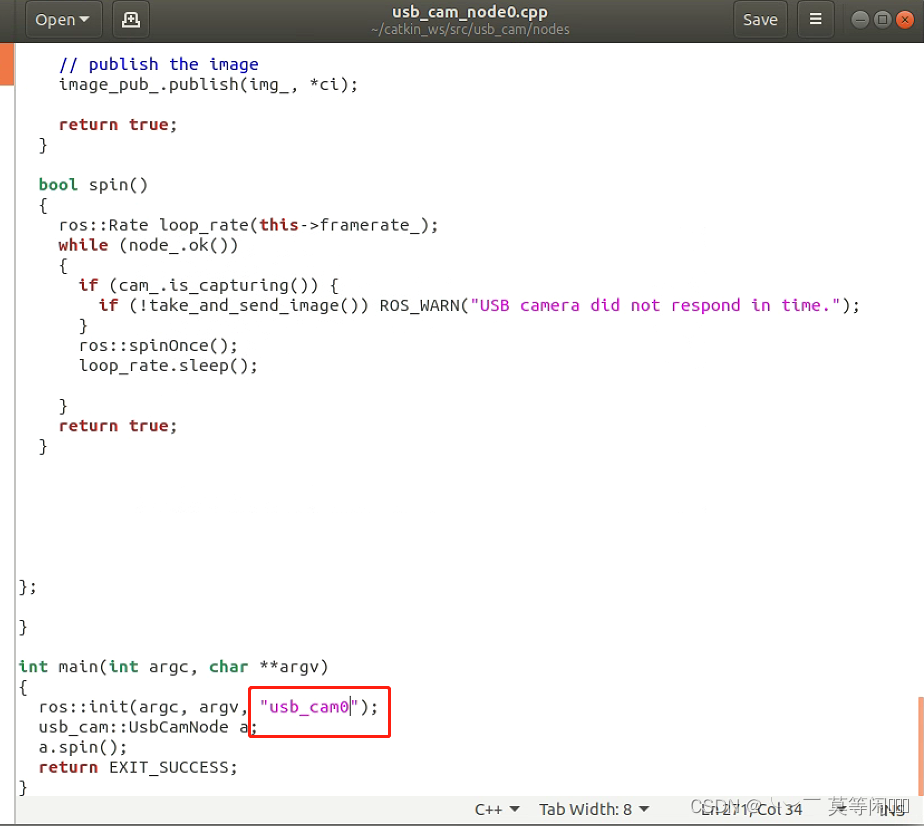
3)编写nodes节点
这里同样需要启动几个摄像头即编写几个node
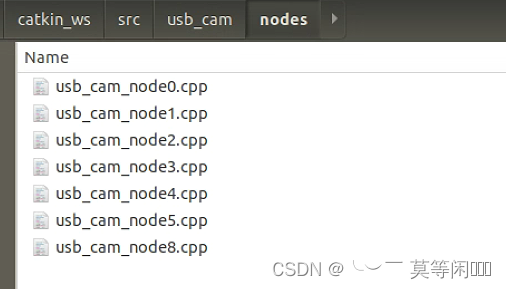
直接复制usb_cam_node.cpp进行修改,具体修改内容如下红框:

4)修改CMakeLists.txt配置文件
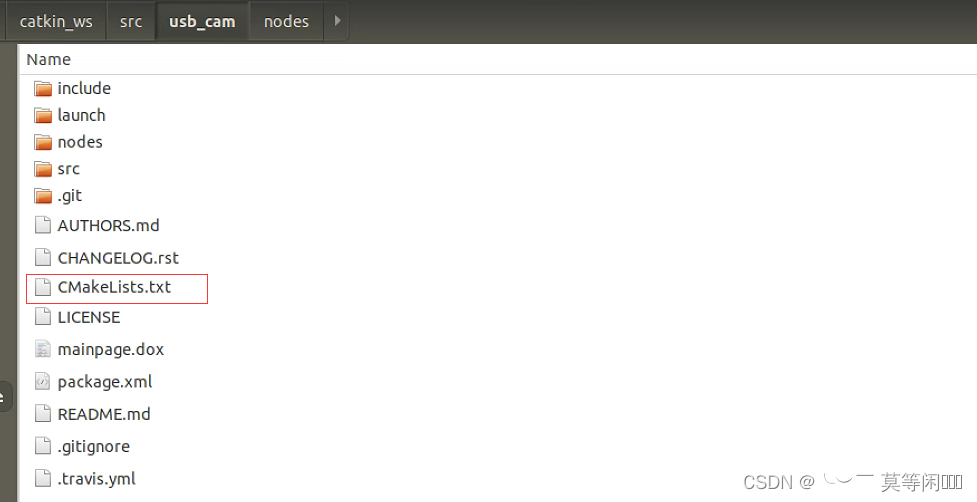
具体修改内容如何:


有几个node就有添加几个add_executable和install
至此文件配置方面已经配置完成。
5)进入工作空间目录重新编译
catkin_make 
6) 在新的终端执行roscore
7)启动launch
roslaunch usb_cam usb_cam-test-total.launch 
这里可以看到我们同时启动的7个摄像头
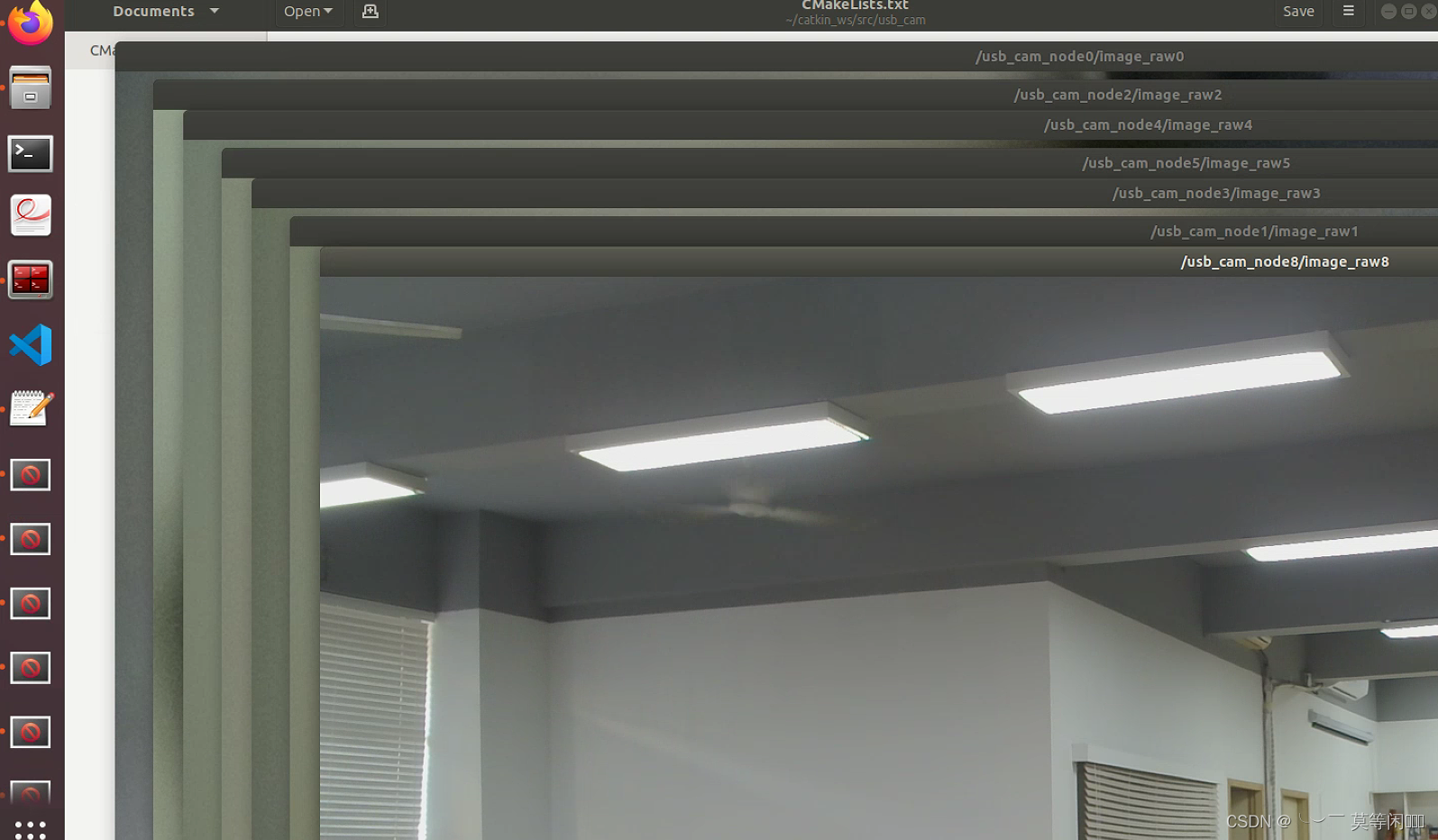
8)使用ros可视化
rosrun rviz rviz
打开RVIZ订阅7个摄像头的话题
