目录
(6)vector_average计算加权平均值和协方差矩阵
common模块中主要是包含了PCL库常用的公共数据结构和方法,比如PointCloud的类和许多用于表示点,曲面,法向量,特征描述等点的类型,用于计算距离,均值以及协方差,角度转换以及几何变化的函数等。这个模块是不依赖其他模块的,所以是可以单独编译成功,单独编译出来可利用其中的数据结构自行开发。
3.1 common模块中的头文件
官方文档:Point Cloud Library (PCL): Module common
中文说明:
| 头文件 | 功能 |
| angles.h | 定义了标准的C接口的角度计算函数 |
| distances.h | 定义标准的C接口用于计算距离 |
| random.h | 定义一些随机点云生成的函数 |
| time.h | 定义了时间计算的函数 |
| time_trigger | 定义计时触发器 |
| centriod.h | 定义了中心点的估算以及协方差矩阵的计算 |
| common.h | 标准的C以及C++类,定义了common所有的方法 |
| file_io.h | 定义了一些文件帮助写或者读方面的功能 |
| geometry.h | 定义一些基本的几何功能的函数 |
| intersection.h | 定义线与线相交的函数 |
| norm.h | 定义了标准的C方法计算矩阵的正则化 |
| Point_types | 定义了所有PCL实现的点云的数据结构的类型 |
| 其他常用功能方法 | |
| spring.h | 定义点云按行列扩展,或镜像翻转 |
| vector_average | 定义计算加权平均值和协方差矩阵 |
| color.h | 定义颜色生成函数 |
| . . . |
|
3.2 common模块中的基本函数
下面所有的程序共用如下的CmakeLists.txt文件
// CMakeLists.txt 文件
// 后面将projectname安装自己的名字更改
cmake_minimum_required(VERSION 2.6)
project(projectname)
find_package(PCL 1.10 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(projectname projectname.cpp)
target_link_libraries (projectname ${PCL_LIBRARIES} )
install(TARGETS projectname RUNTIME DESTINATION bin)
(1)angle角度转换
在pcl/common/angel.h文件中,有三个函数实现
// 从弧度到角度
pcl::rad2deg(float alpha)
// 从角度到弧度
pcl::deg2rad(float aipha)
// 正则化角度在(-PI,PI)之间
pcl::normAngle(float alpha)#include <iostream>
#include <pcl/common/angles.h>
using namespace std;
int main()
{
float alpha = 30;
cout << pcl::deg2rad(alpha) << "-" << 30.0*3.14159/180 << endl;
double beta = pcl::deg2rad(alpha)*2;
cout << pcl::rad2deg(beta) << endl;
return 0;
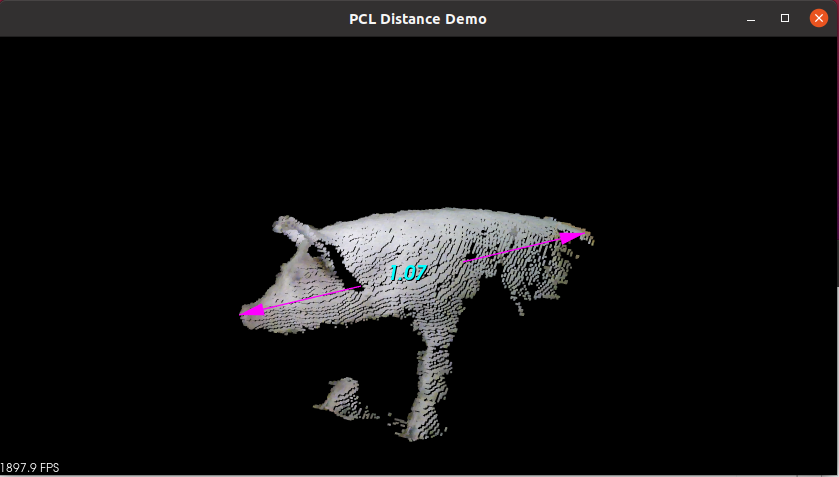
}(2)distance距离计算
在distance头文件中总共有五个函数,包括 lineToLineSegment 、sqrPointToLineDistance 、getMaxSegment、squaredEuclideanDistance 、euclideanDistance这五个函数。
// 获取两条三维直线之间的最短三维线段
pcl::lineToLineSegment (const Eigen::VectorXf &line_a, const Eigen::VectorXf &line_b, Eigen::Vector4f &pt1_seg, Eigen::Vector4f &pt2_seg)
// 在给定的一组点中获得最大分段,并返回最小和最大点。
pcl::getMaxSegment (const pcl::PointCloud< PointT > &cloud, PointT &pmin, PointT &pmax)
// 获取点到线的平方距离(由点和方向表示)
pcl::sqrPointToLineDistance (const Eigen::Vector4f &pt, const Eigen::Vector4f &line_pt, const Eigen::Vector4f &line_dir)
// 欧氏距离平方求解
pcl::squaredEuclideanDistance (const PointType1& p1, const PointType2& p2)
// 欧式距离求解
euclideanDistance (const PointType1& p1, const PointType2& p2)
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/common/distances.h>
using namespace std;
int main()
{
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);
viewer->setWindowName("PCL Distance Demo");
#if 0
// 1. lineToLineSegment
Eigen::VectorXf line_a(6),line_b(6);
Eigen::Vector4f pt1_seg, pt2_seg;
line_a << -5,0,0,10,0,0;
line_b << 0,-5,5,0,10,0;
pcl::ModelCoefficients line_coeff;
line_coeff.values.resize (6);
// line_a
line_coeff.values[0] = line_a(0);
line_coeff.values[1] = line_a(1);
line_coeff.values[2] = line_a(2);
line_coeff.values[3] = line_a(3);
line_coeff.values[4] = line_a(4);
line_coeff.values[5] = line_a(5);
viewer->addLine(line_coeff,"line_a");
// line_b
line_coeff.values[0] = line_b(0);
line_coeff.values[1] = line_b(1);
line_coeff.values[2] = line_b(2);
line_coeff.values[3] = line_b(3);
line_coeff.values[4] = line_b(4);
line_coeff.values[5] = line_b(5);
viewer->addLine(line_coeff,"line_b");
pcl::lineToLineSegment(line_a,line_b,pt1_seg, pt2_seg);
viewer->addLine(pcl::PointXYZ(pt1_seg.x(),pt1_seg.y(),pt1_seg.z()),
pcl::PointXYZ(pt2_seg.x(),pt2_seg.y(),pt2_seg.z()),
1.0,0,0,"lineseg");
// 2. sqrPointToLineDistance
double disSqr = pcl::sqrPointToLineDistance(pt1_seg,
Eigen::Vector4f(line_b(0),line_b(1),line_b(2),0),
Eigen::Vector4f(line_b(3),line_b(4),line_b(5),0));
cout << "pcl::sqrPointToLineDistance: " << disSqr << endl;
// 3. squaredEuclideanDistance
float dis = pcl::squaredEuclideanDistance(pcl::PointXYZ(pt1_seg.x(),pt1_seg.y(),pt1_seg.z()),
pcl::PointXYZ(pt2_seg.x(),pt2_seg.y(),pt2_seg.z()));
cout << "pcl::squaredEuclideanDistance: " << dis << endl;
// 4. euclideanDistance
dis = pcl::euclideanDistance(pcl::PointXYZ(pt1_seg.x(),pt1_seg.y(),pt1_seg.z()),
pcl::PointXYZ(pt2_seg.x(),pt2_seg.y(),pt2_seg.z()));
cout << "pcl::squaredEuclideanDistance: " << dis << endl;
#else
// 5. getMaxSegment
pcl::PointCloud<pcl::PointXYZRGB> cloud;
pcl::io::loadPCDFile("../pig1.pcd",cloud);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud.makeShared());
viewer->addPointCloud(cloud.makeShared(),rgb);
pcl::PointXYZRGB pmin,pmax;
double maxseg = pcl::getMaxSegment(cloud,pmin,pmax);
cout << "pcl::getMaxSegment: " << maxseg << endl;
viewer->addArrow(pmin,pmax,1.0,0.0,1.0,0,1.0,1.0);
#endif
while(!viewer->wasStopped())
viewer->spinOnce(100);
return 0;
}
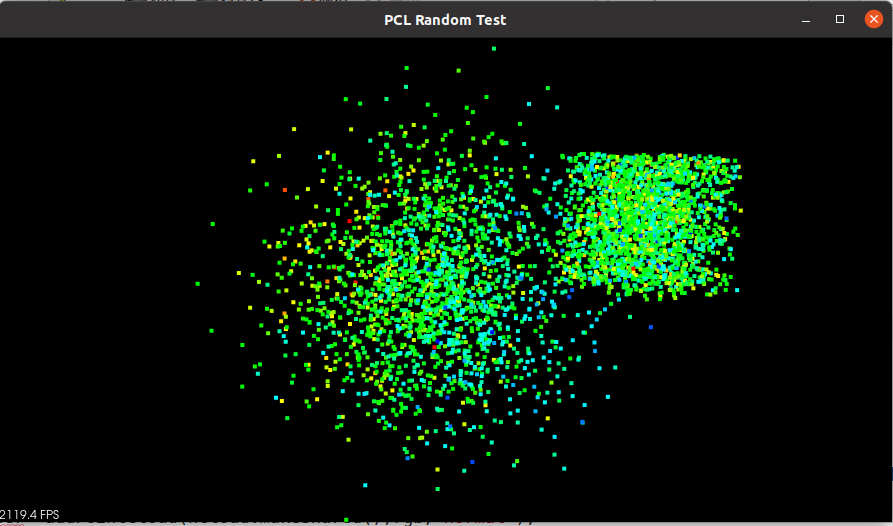
(3)random随机数生成
//高斯噪声产生器
pcl::common::CloudGenerator<pcl::PointXYZ, pcl::common::NormalGenerator<float> > generator;
//均匀分布噪声产生器
pcl::common::UniformGenerator<pcl::PointXYZ, pcl::common::NormalGenerator<float> >
//生成随机种子
uint32_t seed = static_cast<uint32_t> (time(NULL));
//根据参数添加x方向的噪声
pcl::common::NormalGenerator<float>::Parameters x_params(xmean, xstddev, seed++);
generator.setParametersForX(x_params);
//根据参数添加y方向的噪声
pcl::common::NormalGenerator<float>::Parameters y_params(ymean, ystddev, seed++);
generator.setParametersForY(y_params);
//根据参数添加z方向的噪声
pcl::common::NormalGenerator<float>::Parameters z_params(zmean, zstddev, seed++);
generator.setParametersForZ(z_params);
//产生等数据量的随机噪声
generator.fill((*cloud).width, (*cloud).height, *gauss_cloud); #include <iostream>
#include <ctime>
#include <pcl/common/random.h>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int main()
{
pcl::PointCloud<pcl::PointXYZ> ncloud,ucloud;
uint32_t seed = static_cast<uint32_t> (time(NULL));
pcl::common::NormalGenerator<float> normal(0,5,seed);
for(int i = 0; i < 2000; ++i)
{
ncloud.push_back(pcl::PointXYZ(normal.run(),normal.run(),normal.run()));
}
pcl::common::UniformGenerator<float> uniform(0,10,seed);
for(int i = 0; i < 2000; ++i)
{
ucloud.push_back(pcl::PointXYZ(uniform.run()+10,uniform.run(),uniform.run()));
}
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer());
viewer->setWindowName("PCL Random Test");
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> rgb(ncloud.makeShared(),"z");
viewer->addPointCloud(ncloud.makeShared(),rgb,"normal");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,4,"normal");
viewer->addPointCloud(ucloud.makeShared(),rgb,"uniform");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,4,"uniform");
while(!viewer->wasStopped())
viewer->spinOnce(100);
return 0;
}
(4)sping扩展模块
// 按行扩展
pcl::common::expandRows (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const PointT& val, const std::size_t& amount)
// 按列扩展
pcl::common::expandColumns (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const PointT& val, const std::size_t& amount)
// 复制行
pcl::common::duplicateRows (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const std::size_t& amount)
// 复制列
pcl::common::duplicateColumns (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const std::size_t& amount)
// 删除行
pcl::common::deleteRows (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const std::size_t& amount)
// 删除列
pcl::common::deleteCols (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const std::size_t& amount)
// 镜像翻转行
pcl::common::mirrorRows (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const std::size_t& amount)
// 镜像翻转列
pcl::common::mirrorColumns (const PointCloud<PointT>& input, PointCloud<PointT>& output,
const std::size_t& amount)#include <iostream>
#include <pcl/common/spring.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
using namespace std;
void printCloud(pcl::PointCloud<pcl::PointXYZ> &cloud)
{
int nrow = cloud.height;
int ncol = cloud.width;
for(int i = 0; i < nrow; ++i)
{
for(int j = 0; j < ncol; ++j)
{
cout << "(" << cloud.at(i*ncol + j).x << "," << cloud.at(i*ncol + j).y << "," << cloud.at(i*ncol + j).z << ") ";
}
cout << endl;
}
}
int main()
{
pcl::PointCloud<pcl::PointXYZ> cloud;
for(int irow = 0; irow < 3; ++irow)
{
for(int icol = 0; icol < 4; ++icol)
{
cloud.push_back(pcl::PointXYZ(irow,icol,irow+icol));
}
}
cloud.width = 3;
cloud.height = 4;
cout << cloud;
printCloud(cloud);
pcl::PointCloud<pcl::PointXYZ> ocloud;
pcl::common::expandRows(cloud,ocloud,pcl::PointXYZ(99,99,99),2);
cout << ocloud;
printCloud(ocloud);
cout << "----------------------------------" << endl;
pcl::common::duplicateColumns(cloud,ocloud,1);
cout << ocloud;
printCloud(ocloud);
cout << "----------------------------------" << endl;
pcl::common::deleteRows(ocloud,ocloud,1);
cout << ocloud;
printCloud(ocloud);
cout << "----------------------------------" << endl;
pcl::common::mirrorRows(ocloud,cloud,1);
cout << cloud;
printCloud(cloud);
return 0;
}
(5)time获取时间模块
#include <iostream>
#include <pcl/common/time.h>
using namespace std;
int main()
{
pcl::StopWatch watch;
pcl::EventFrequency freq;
{
pcl::ScopeTime scope("test for");
int res;
for(int i = 0; i < 1000000000; ++i)
{
res = i*i;
if(i%100 == 0) freq.event();
}
}
cout << watch.getTime() << "ms - " << watch.getTimeSeconds() << "s" << endl;
cout << (uint32_t)freq.getFrequency() << endl;
DO_EVERY(20,[]{ cout << "test do every" << endl;}());
return 0;
}(6)vector_average计算加权平均值和协方差矩阵
#include <iostream>
#include <pcl/common/vector_average.h>
using namespace std;
int main()
{
pcl::VECtor
pcl::VectorAverage<float,4> vec;
pcl::VectorAverage<float,4>::VectorType sample1;
sample1 << 1,2,3,4;
vec.add(sample1);
Eigen::Vector4f sample2;
sample2 << 2,5,7,1;
vec.add(sample2,2);
Eigen::Matrix<float, 4, 1> sample3;
sample3 << 0,7,8,4;
vec.add(sample3);
cout << vec.getMean() << endl << vec.getCovariance() << endl;
Eigen::Vector4f v,v1,v2,v3;
vec.doPCA(v,v1,v2,v3);
cout << v << endl << v1 << endl << v2 << endl << v3 << endl;
return 0;
}
(7)time_trigger计时触发器
#include <iostream>
#include <pcl/common/time_trigger.h>
using namespace std;
static int cnt = 0;
struct callBack
{
void operator() (){
cout << "callBack " << cnt++ << endl;
}
};
int main()
{
// 定义计时触发器类
pcl::TimeTrigger triger/*(1,callBack())*/;
triger.setInterval(0.5);
triger.registerCallback(callBack());
triger.start();
// 将主线程暂停100s
std::this_thread::sleep_for(std::chrono::seconds(100));
return 0;
}
(8)colors颜色生成函数
#include <iostream>
#include <pcl/common/colors.h>
#include <array>
using namespace std;
int main()
{
srand(time(nullptr));
pcl::RGB rgb = pcl::getRandomColor(0.5,1.5);
cout << "(" << (int)rgb.r << "," << (int)rgb.b << "," << (int)rgb.g << "," << (int)rgb.a << ")" << endl;
pcl::ColorLUT<pcl::LUT_GLASBEY> glut; //等价于pcl::GlasbeyLUT glut;
pcl::ColorLUT<pcl::LUT_VIRIDIS> vlut; //等价于pcl::ViridisLUT vlut;
cout << glut.at(127) << endl << vlut.at(127) << endl << glut.size() << " " << vlut.size() << endl;
cout << pcl::ColorLUT<pcl::LUT_GLASBEY>::at(100) << endl << pcl::ViridisLUT::at(100) << endl;
return 0;
}(9)centroid点云计算
// 计算点云质心
pcl::compute3DCentroid(*cloud_smoothed,centroid);
// 计算点云协方差矩阵
pcl::computeCovarianceMatrix<pcl::PointXYZRGB,double>
// 计算点云标准化协方差矩阵
pcl::computeCovarianceMatrixNormalized(*cloud,centroid1,covariance_matrix);#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/pcd_io.h>
#include <pcl/common/centroid.h>
#include <Eigen/Eigen>
using namespace std;
int main()
{
pcl::PointCloud<pcl::PointXYZRGB> cloud;
pcl::io::loadPCDFile("../pig.pcd",cloud);
Eigen::Matrix<float, 4, 1> centroid;
pcl::compute3DCentroid<pcl::PointXYZRGB,float>(cloud,centroid);
cout << "float centroid: \n" << centroid << endl;
Eigen::Matrix<double, 4, 1> centroid1;
pcl::compute3DCentroid<pcl::PointXYZRGB,double>(cloud,centroid1);
cout << "double centroid: \n" << centroid1 << endl;
Eigen::Matrix<double, 3, 3> covariance_matrix;
pcl::computeCovarianceMatrix<pcl::PointXYZRGB,double>(cloud,centroid1,covariance_matrix);
cout << "double covariance_matrix: \n" << covariance_matrix << endl;
pcl::computeCovarianceMatrixNormalized<pcl::PointXYZRGB,double>(cloud,centroid1,covariance_matrix);
cout << "double covariance_matrix Normalized: \n" << covariance_matrix << endl;
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer());
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud.makeShared());
viewer->addPointCloud(cloud.makeShared(),rgb);
while (!viewer->wasStopped()) {
viewer->spinOnce(1000);
}
return 0;
}
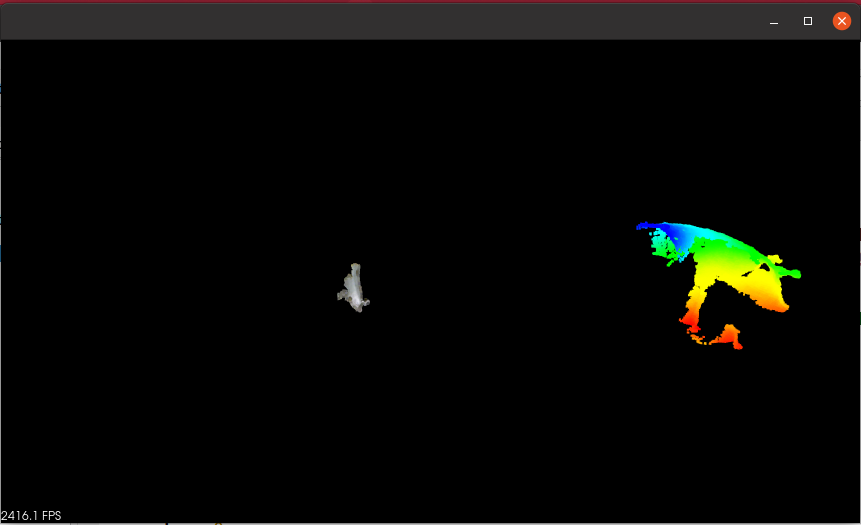
(10)transforms点云变换模块
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/pcd_io.h>
#include <pcl/common/transforms.h>
#include <pcl/common/centroid.h>
using namespace std;
using PCRGB = pcl::PointCloud<pcl::PointXYZRGB>;
void transform1(PCRGB &in_cloud,PCRGB &out_cloud)
{
#if 0
Eigen::Affine3f transform = Eigen::Affine3f::Identity();
transform.translation() << 20,-10,10;
transform.rotate(Eigen::AngleAxisf(M_PI/4,Eigen::Vector3f::UnitX()));
#else
Eigen::Transform<float,3,Eigen::Affine> transform = Eigen::Transform<float,3,Eigen::Affine>::Identity();
transform.translation() << 10,-5,5;
transform.rotate(Eigen::AngleAxisf(M_PI/4,Eigen::Vector3f::UnitX()));
transform.scale(2);
#endif
cout << transform.matrix() << endl;
pcl::transformPointCloud(in_cloud,out_cloud,transform);
}
void transform2(PCRGB &in_cloud,PCRGB &out_cloud)
{
#if 0
Eigen::Matrix4f transform = Eigen::Matrix4f::Identity();
float theta = M_PI/2;
// transform(0,0) *= 2;
transform(1,1) = cos(theta);
transform(2,2) = cos(theta);
transform(2,1) = sin(theta);
transform(1,2) = -sin(theta);
transform(0,3) = 20;
transform(1,3) = -10;
transform(2,3) = 20;
#else
Eigen::Matrix<float, 4, 4> transform = Eigen::Matrix<float, 4, 4>::Identity();
float theta = M_PI/2;
transform(0,0) *= 1;
transform(1,1) = 1*cos(theta);
transform(2,2) = 1*cos(theta);
transform(2,1) = 1*sin(theta);
transform(1,2) = -1*sin(theta);
transform(0,3) = 10;
transform(1,3) = -5;
transform(2,3) = 10;
#endif
pcl::transformPointCloud(in_cloud,out_cloud,transform);
}
void transform3(PCRGB &in_cloud,PCRGB &out_cloud)
{
#if 0
Eigen::Vector3f offset(20,-10,10);
Eigen::Quaternionf rotation(Eigen::AngleAxisf(-M_PI/2,Eigen::Vector3f::UnitX()));
#else
Eigen::Matrix<float,3,1> offset(10,-5,5);
Eigen::Quaternion<float> rotation(Eigen::AngleAxisf(-M_PI/2,Eigen::Vector3f::UnitX()));
#endif
pcl::transformPointCloud(in_cloud,out_cloud,offset,rotation);
}
void trans(PCRGB &in_cloud,PCRGB &out_cloud,int type)
{
switch(type){
case 1:
transform1(in_cloud,out_cloud);
break;
case 2:
transform2(in_cloud,out_cloud);
break;
case 3:
transform3(in_cloud,out_cloud);
break;
default:
break;
}
}
int main()
{
PCRGB in_cloud,out_cloud;
pcl::io::loadPCDFile("../pig.pcd",in_cloud);
Eigen::Matrix<float, 4, 1> centroid;
pcl::compute3DCentroid(in_cloud,centroid);
Eigen::Affine3f transform0 = Eigen::Affine3f::Identity();
transform0.translation() << -centroid(0),-centroid(1),-centroid(2);
pcl::transformPointCloud(in_cloud,in_cloud,transform0);
trans(in_cloud,out_cloud,2);
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer());
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(in_cloud.makeShared());
viewer->addPointCloud(in_cloud.makeShared(),rgb,"in_cloud");
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZRGB> rgbt(out_cloud.makeShared(),"z");
viewer->addPointCloud(out_cloud.makeShared(),rgbt,"out_cloud");
while(!viewer->wasStopped())
{
viewer->spinOnce(100);
}
return 0;
}
common模块中的基本函数
pcl::rad2deg(fllat alpha)
从弧度到角度
pcl::deg2rad(float aipha)
从角度到弧度
pcl::normAngle(float alpha)
正则化角度在(-PI,PI)之间
pcl::compute3DCentroid (const pcl::PointCloud< PointT > &cloud, Eigen::Matrix< Scalar, 4, 1 > ¢roid)
计算给定一群点的3D中心点,并且返回一个三维向量
pcl::computeCovarianceMatrix (const pcl::PointCloud< PointT > &cloud, const Eigen::Matrix< Scalar, 4, 1 > ¢roid, Eigen::Matrix< Scalar, 3, 3 > &covariance_matrix)
计算给定的三维点云的协方差矩阵。
pcl::computeMeanAndCovarianceMatrix (const pcl::PointCloud< PointT > &cloud, Eigen::Matrix< Scalar, 3, 3 > &covariance_matrix, Eigen::Matrix< Scalar, 4, 1 > ¢roid
计算正则化的3*3的协方差矩阵以及给定点云数据的中心点
pcl::demeanPointCloud (const pcl::PointCloud< PointT > &cloud_in, const Eigen::Matrix< Scalar, 4, 1 > ¢roid, pcl::PointCloud< PointT > &cloud_out)
pcl::computeNDCentroid (const pcl::PointCloud< PointT > &cloud, Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > ¢roid)
利用一组点的指数对其进行一般的、通用的nD中心估计。
pcl::getAngle3D (const Eigen::Vector4f &v1, const Eigen::Vector4f &v2, const bool in_degree=false)
计算两个向量之间的角度
pcl::getMeanStd (const std::vector< float > &values, double &mean, double &stddev)
同时计算给定点云数据的均值和标准方差
pcl::getPointsInBox (const pcl::PointCloud< PointT > &cloud, Eigen::Vector4f &min_pt, Eigen::Vector4f &max_pt, std::vector< int > &indices)
在给定边界的情况下,获取一组位于框中的点
pcl::getMaxDistance (const pcl::PointCloud< PointT > &cloud, const Eigen::Vector4f &pivot_pt, Eigen::Vector4f &max_pt)
给定点云数据中点与点之间的最大距离的值
pcl::getMinMax3D (const pcl::PointCloud< PointT > &cloud, PointT &min_pt, PointT &max_pt)
获取给定点云中的在XYZ轴上的最大和最小值
pcl::getCircumcircleRadius (const PointT &pa, const PointT &pb, const PointT &pc)
计算由三个点pa、pb和pc构成的三角形的外接圆半径。
pcl::getMinMax (const PointT &histogram, int len, float &min_p, float &max_p)
获取点直方图上的最小值和最大值。
pcl::calculatePolygonArea (const pcl::PointCloud< PointT > &polygon)
根据给定的多边形的点云计算多边形的面积
pcl::copyPoint (const PointInT &point_in, PointOutT &point_out)
从Point_in把字段数据赋值到Point_out
pcl::lineToLineSegment (const Eigen::VectorXf &line_a, const Eigen::VectorXf &line_b, Eigen::Vector4f &pt1_seg, Eigen::Vector4f &pt2_seg)
获取两条三维直线之间的最短三维线段
pcl::sqrPointToLineDistance (const Eigen::Vector4f &pt, const Eigen::Vector4f &line_pt, const Eigen::Vector4f &line_dir)
获取点到线的平方距离(由点和方向表示)
pcl::getMaxSegment (const pcl::PointCloud< PointT > &cloud, PointT &pmin, PointT &pmax)
在给定的一组点中获得最大分段,并返回最小和最大点。
pcl::eigen22 (const Matrix &mat, typename Matrix::Scalar &eigenvalue, Vector &eigenvector)
确定最小特征值及其对应的特征向量
pcl::computeCorrespondingEigenVector (const Matrix &mat, const typename Matrix::Scalar &eigenvalue, Vector &eigenvector)
确定对称半正定输入矩阵给定特征值对应的特征向量
pcl::eigen33 (const Matrix &mat, typename Matrix::Scalar &eigenvalue, Vector &eigenvector)
确定对称半正定输入矩阵最小特征值的特征向量和特征值
pcl::invert2x2 (const Matrix &matrix, Matrix &inverse)
计算2x2矩阵的逆。
pcl::invert3x3SymMatrix (const Matrix &matrix, Matrix &inverse)
计算3x3对称矩阵的逆。
pcl::determinant3x3Matrix (const Matrix &matrix)
计算3x3矩阵的行列式
pcl::getTransFromUnitVectorsZY (const Eigen::Vector3f &z_axis, const Eigen::Vector3f &y_direction, Eigen::Affine3f &transformation)
获得唯一 的3D旋转,将Z轴旋转成(0,0,1)Y轴旋转成(0,1,0)并且两个轴是正交的。
pcl::getTransformationFromTwoUnitVectorsAndOrigin (const Eigen::Vector3f &y_direction, const Eigen::Vector3f &z_axis, const Eigen::Vector3f &origin, Eigen::Affine3f &transformation)
得到将origin转化为(0,0,0)的变换,并将Z轴旋转成(0,0,1)和Y方向(0,1,0)
pcl::getEulerAngles (const Eigen::Transform< Scalar, 3, Eigen::Affine > &t, Scalar &roll, Scalar &pitch, Scalar &yaw)
从给定的变换矩阵中提取欧拉角
pcl::getTranslationAndEulerAngles (const Eigen::Transform< Scalar, 3, Eigen::Affine > &t, Scalar &x, Scalar &y, Scalar &z, Scalar &roll, Scalar &pitch, Scalar &yaw)
给定的转换中,提取XYZ以及欧拉角
pcl::getTransformation (float x, float y, float z, float roll, float pitch, float yaw)
从给定的平移和欧拉角创建转换矩阵
pcl::saveBinary (const Eigen::MatrixBase< Derived > &matrix, std::ostream &file)
保存或者写矩阵到一个输出流中
pcl::loadBinary (Eigen::MatrixBase< Derived > const &matrix, std::istream &file)
从输入流中读取矩阵
pcl::lineWithLineIntersection (const Eigen::VectorXf &line_a, const Eigen::VectorXf &line_b, Eigen::Vector4f &point, double sqr_eps=1e-4)
获取空间中两条三维直线作为三维点的交点。
pcl::getFieldIndex (const pcl::PCLPointCloud2 &cloud, const std::string &field_name)
获取指定字段的索引(即维度/通道)
pcl::getFieldsList (const pcl::PointCloud< PointT > &cloud)
获取给定点云中所有可用字段的列表
pcl::getFieldSize (const int datatype)
获取特定字段数据类型的大小(字节)。
pcl::concatenatePointCloud (const pcl::PCLPointCloud2 &cloud1, const pcl::PCLPointCloud2 &cloud2, pcl::PCLPointCloud2 &cloud_out)
连接 pcl::PCLPointCloud2类型的点云字段
参考文章
(1)官方文档:Point Cloud Library (PCL): Module common
(2)博客:PCL基础介绍_像话吗的博客-CSDN博客