存在的问题
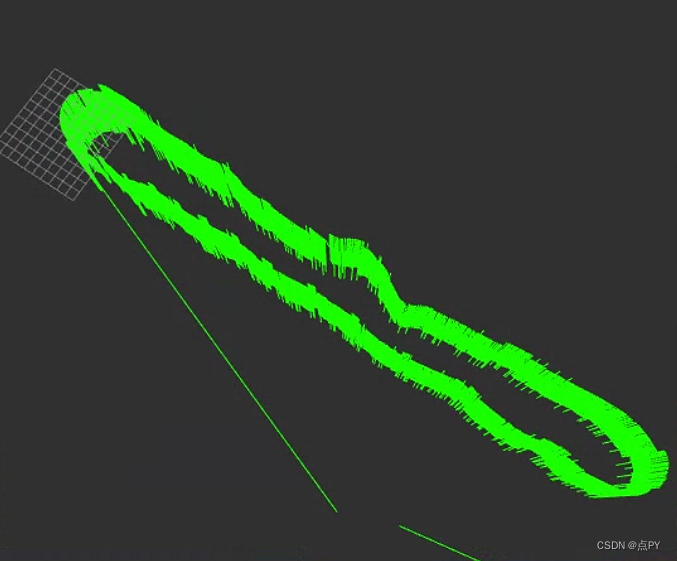
不同的传感器记录的时间存在差异,若是不进行同步操作,会导致融合结果异常,这是我可视化后的轨迹,存在大幅度抖动。
未同步的imu和gps融合
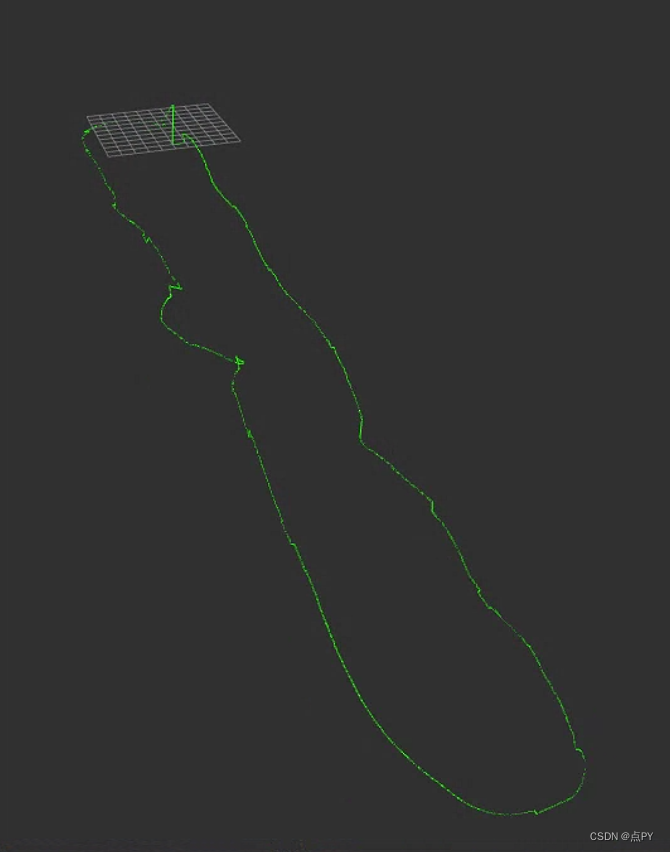
gps轨迹
可能的解决方法
在ROS中,实现多传感器的时间同步是非常重要的,以确保传感器数据在时间上保持一致,从而进行有效的数据融合和处理。以下是一些方法来实现多传感器时间同步:
-
使用message_filters包: message_filters是ROS中用于对消息进行同步和筛选的包。你可以使用它来实现多个传感器数据的时间同步。可以通过创建一个时间同步器,将不同传感器的消息进行同步,以确保它们的时间戳接近。
-
使用硬件同步: 如果你的传感器支持硬件同步,可以使用硬件同步来确保传感器的数据在硬件层面上保持同步。这可以在硬件电路中实现,例如通过触发信号或同步线。
-
使用时间戳对齐算法: 如果你的传感器不支持硬件同步,你可以使用时间戳对齐算法来校准传感器的时间戳。这可以通过计算不同传感器之间的时间偏移来实现。你可以使用统计学方法,例如最小二乘法,来估计时间偏移量。
-
使用tf库: tf库是ROS中的一个用于处理坐标变换的库。你可以使用tf库来同步不同传感器之间的坐标系,并将传感器数据变换到一个公共的坐标系中。
-
使用外部时间同步设备: 一些传感器可能配备了外部时间同步设备,例如GPS时间同步模块。这些设备可以用来确保传感器数据的时间戳与外部时间同步。
-
使用时间戳修正节点: 创建一个ROS节点,订阅不同传感器的数据,并根据其时间戳进行修正。你可以在这个节点中对传感器数据进行插值,以使它们在时间上保持一致。