目录
前言
前面总结了双向交错CCM图腾柱无桥单相PFC系统实现,后面把问题细分,关于SOGI锁相环的应用和学习在这里总结下。
双向交错CCM图腾柱无桥单相PFC学习仿真与实现(1)系统问题分解_卡洛斯伊的博客-CSDN博客
SOGI基本原理
SOGI也叫做二阶广义积分器,也叫正交信号发生器,目的就是得到单相的正交信号,其实说白了就是相当于一个观测器,通过SOGI之后得到电网侧的电压(幅值)和相位,如下图是TI的文档摘录下来的框图:
V'估算的同相位的电网电压
qv'相位相差90度

参考文档: Software Phase Locked Loop Design Using C2000™ Microcontrollers for Single Phase Grid Connected Inverter

为了方便理解,直接定义V' 为valpha, qv'为vbeta:从输入Vin到输出的传递函数可以表示如下,从上面的框图很容易就推导出来了,很多论文也都是这个表达式:

在Matlab里面创建脚本来帮助分析它们的传递函数,电网频率50Hz,K取1.414如下:
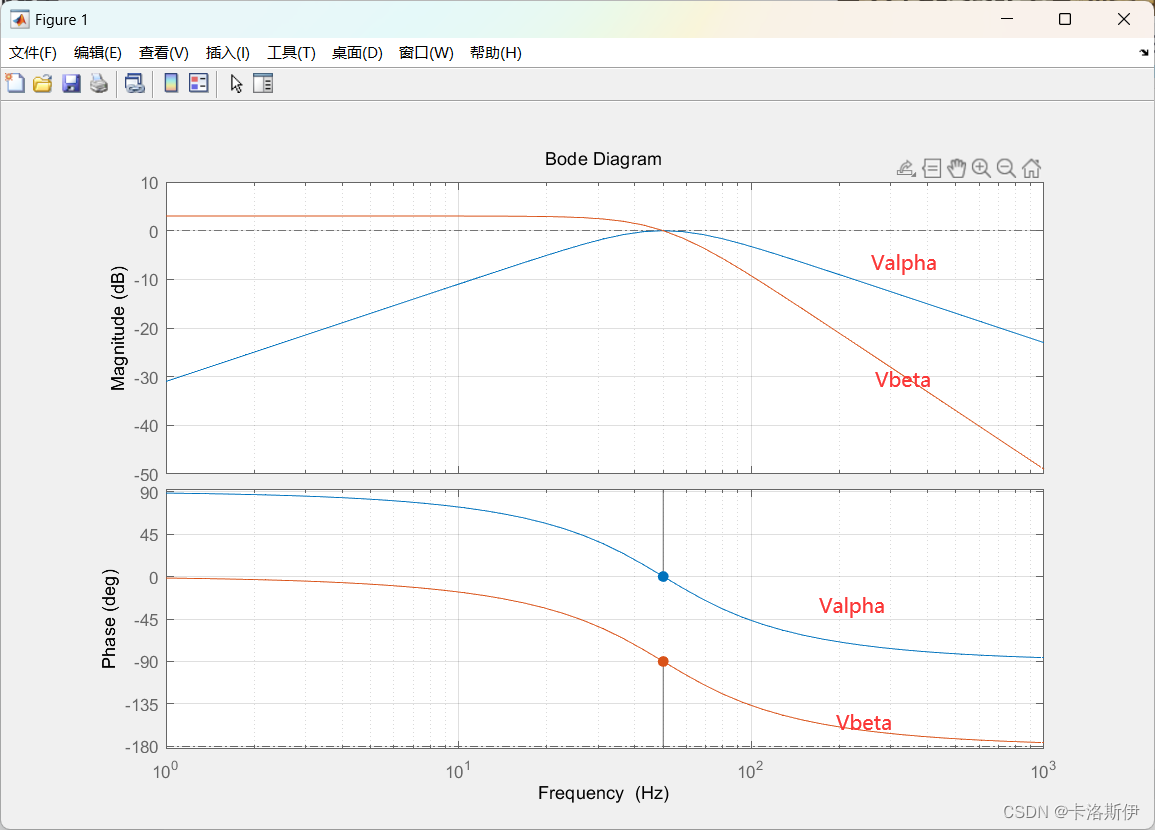
上图时k=1.414时,传递函数Valpha和Vbeta的频率响应曲线。当输入信号在50Hz时,有频率响应曲线可分析得出:增益 为0 db, 表明输出信号alpha和beta在50Hz幅度保持不变。相位在50Hz处:Valpha是0度,表示alpha成输入同相位,Vbeta是-90度,表示beta的输入滞后输入90度。另外,谐波次数越高,该系统对谐波的衰减作用越大。
改变k=0.414的值:
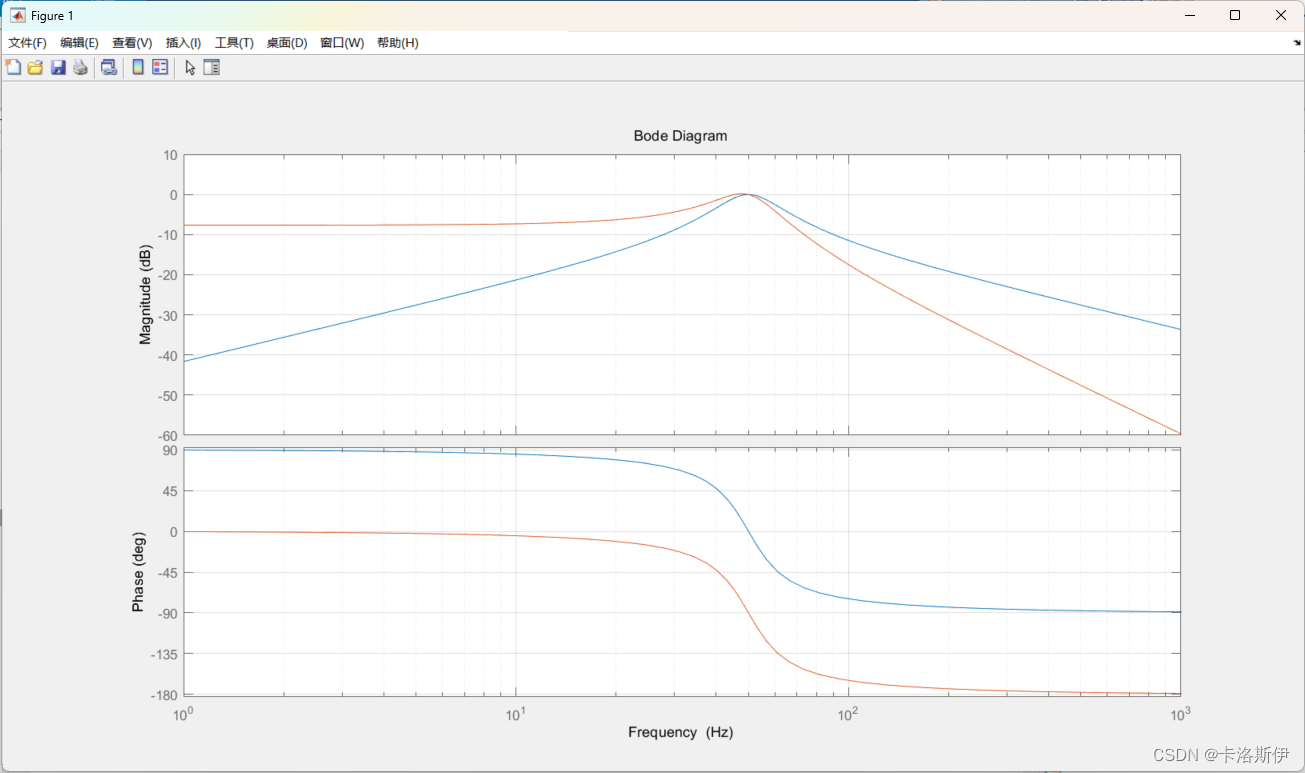
改变k=2.414的值:
从上图可以看出,K的值越大对高次谐波的抑制越小,通过的频率只与Wn有关
再看下三者的阶跃响应:
K越小,响应越快稳定性越差,K越大响应越慢,稳定性越好,综合下来K取1.414或者1附近都是可以的,具体也要看电网谐波情况和响应需要选择合适的值
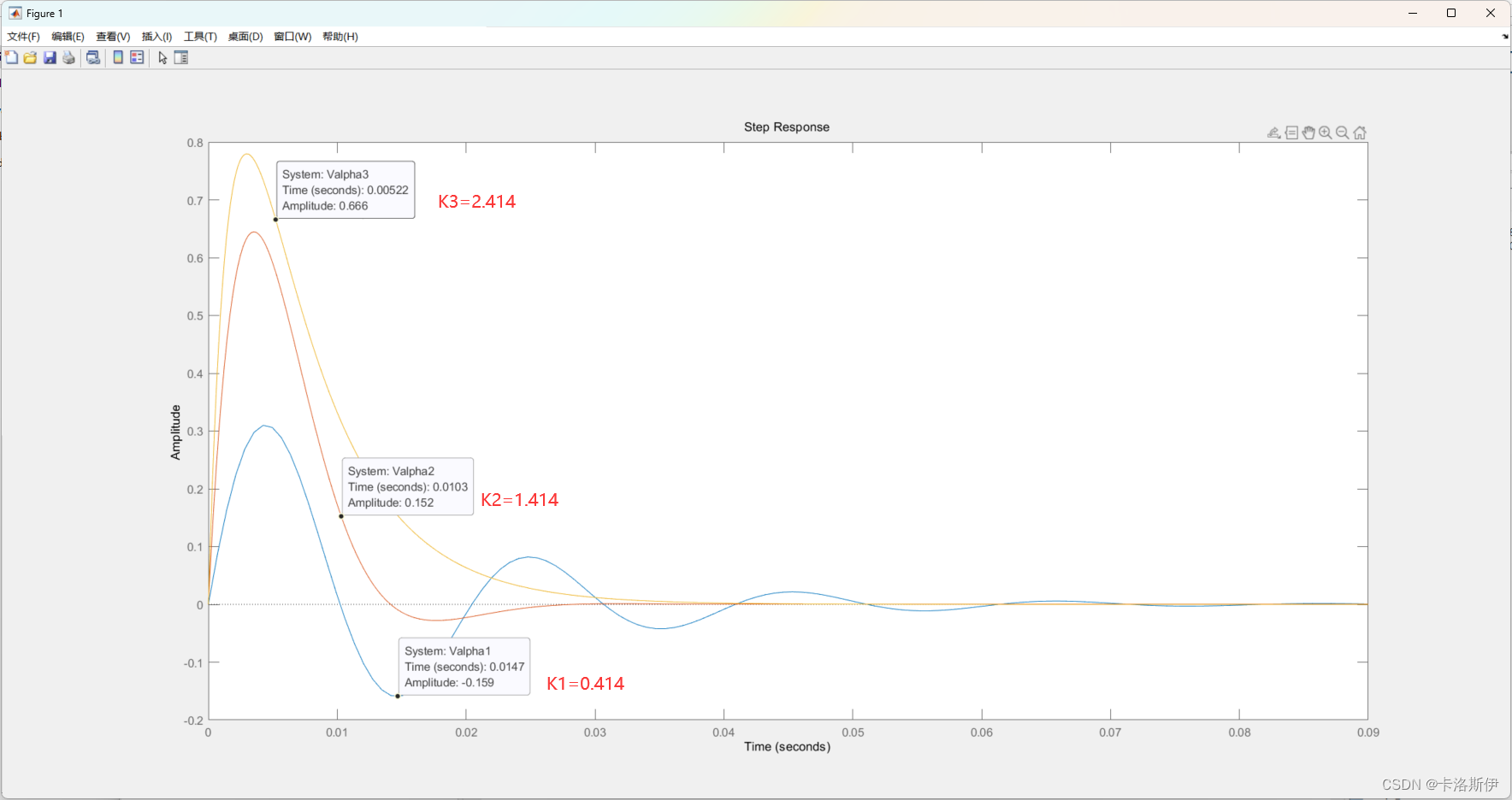
K值影响的就是Valpha观测的响应速度:
K=0.9
K=1.414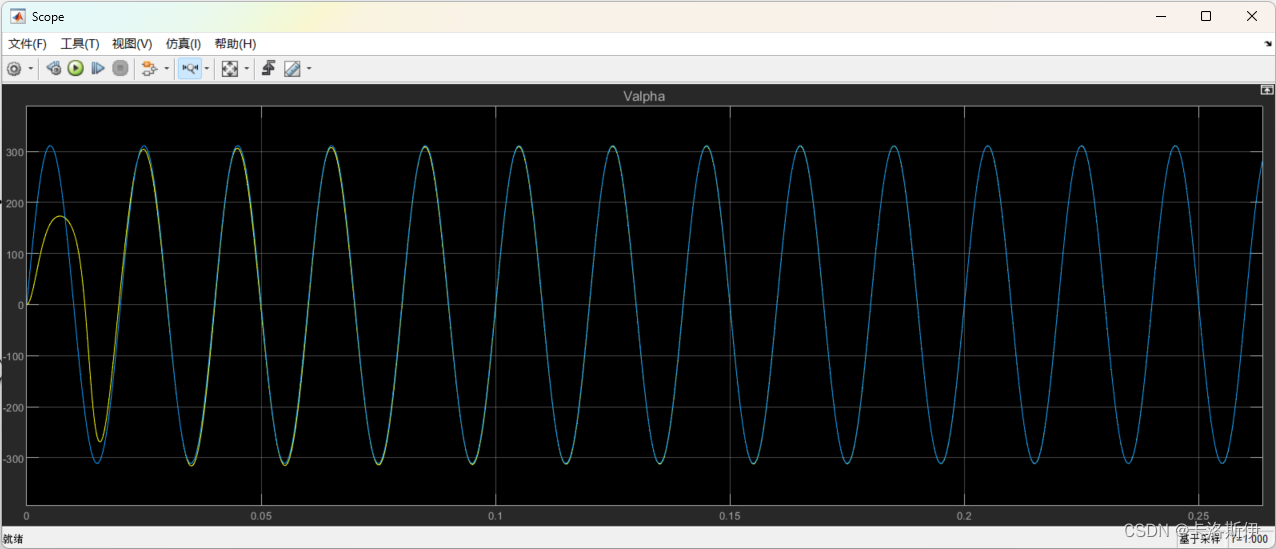
锁相环基本原理
前面介绍了SOGI的原理,接下来如何设计锁相环,通过SOGI得到了Valpha,Vbeta,当稳态时有:

经过Clark变换后有:

通过上式可以看出,当估算角度和实际角度一样时,利用这个特性,就可以设计出锁相环,把
当作锁相环的误差输入, 除以
相当于把输入误差归一化. 当估计角度接近实际角度,
可直接表示为:

这时候控制框图可等效为:

根据框图设计锁相环参数:
PLL_KP=33.3;
PLL_Ki=33.3*3;
W0sogi= 2*pi*50;
C_PLL_s=PLL_KP+(PLL_Ki/s)+W0sogi;
G_PLL_s=1/s;
controlSystemDesigner( G_PLL_s,C_PLL_s,1,1); 带宽50Hz

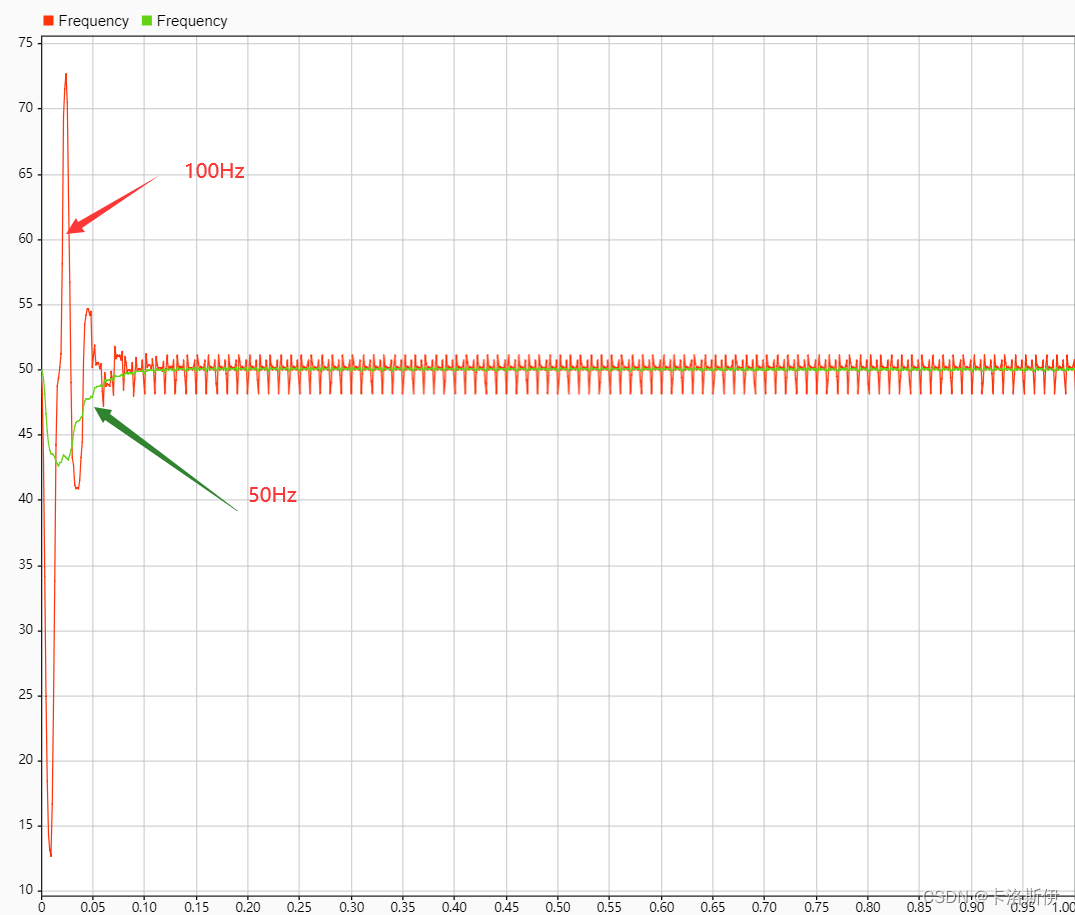
锁相环输出的频率, 这里对比了锁相环带宽50Hz和100Hz参数的估算的电频率的响应(电网频率50Hz).
仿真实现及说明
根据前面的理论, 搭建SOGI_PLL的仿真模型

1.模拟电网电压,这里添加了357次谐波来验证SOGI的特性
2.SOGI估算电网电压和正交的电网电压
3.利用Park变换设计的锁相环
4.计算电压RMS的值
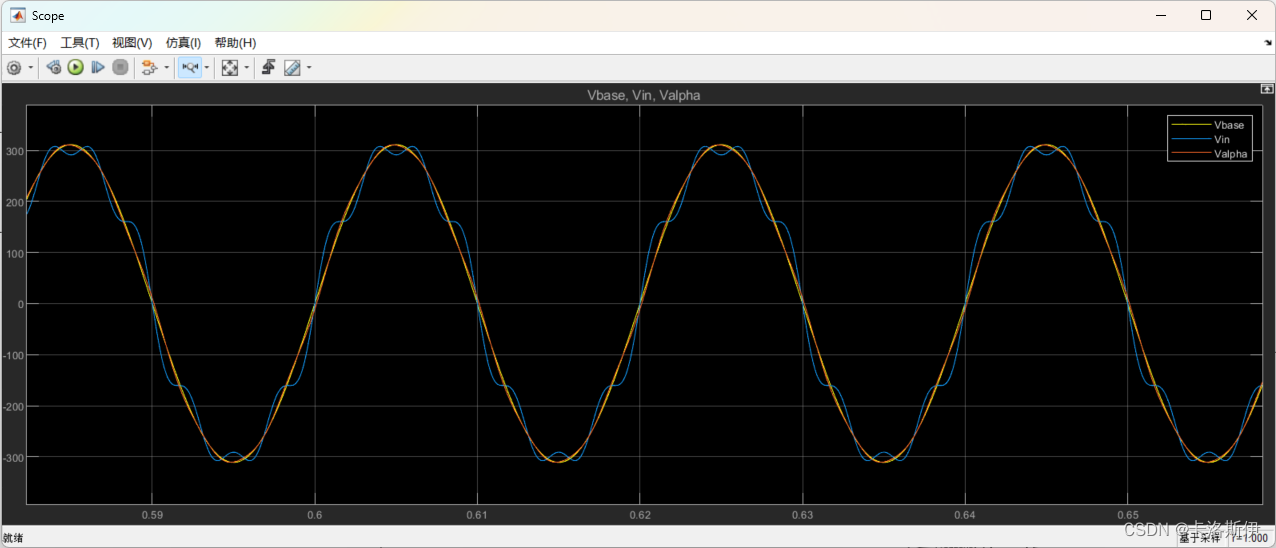
仿真效果:
黄色Vbase相当于实际的电网电压(理想电压), 蓝色Vin叠加了各种高次谐波, 经过SOGI后得到的估算电网电压和Vbase重合,避免高次谐波的干扰.
完整的仿真过程如下: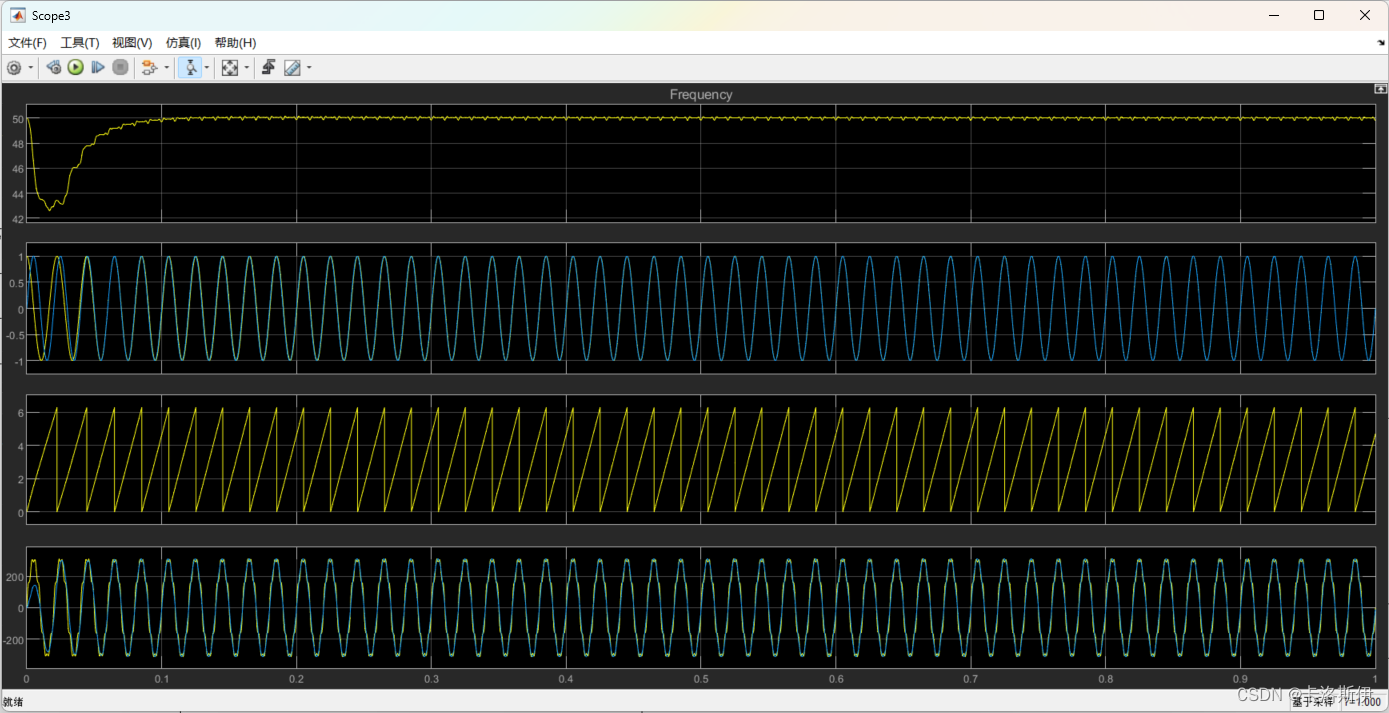
总结
以上, 根据个人的理解并构建了相应的仿真模型验证, 并解释了SOGI_PLL参数的特性和如何设计对应的参数。参考模型:
https://download.csdn.net/download/weixin_42665184/87936402?spm=1001.2014.3001.5503
代码生成和集成已经完成,实际硬件运行效果: