前言
上一次说到单相的PFC硬件功能已经实现,THD=3.15%满足了国标要求的范围,还是有优化的空间,目前系统设计的是6.6Kw,220V交流输出,400-800V直流输出。目前基本功能完成,但是还有很多细节需要优化,不只是THD,启动,空载运行等参数,还有不同电压下电流环路的参数都需要优化。下面进行一个简单的总结。

电流环参数优化
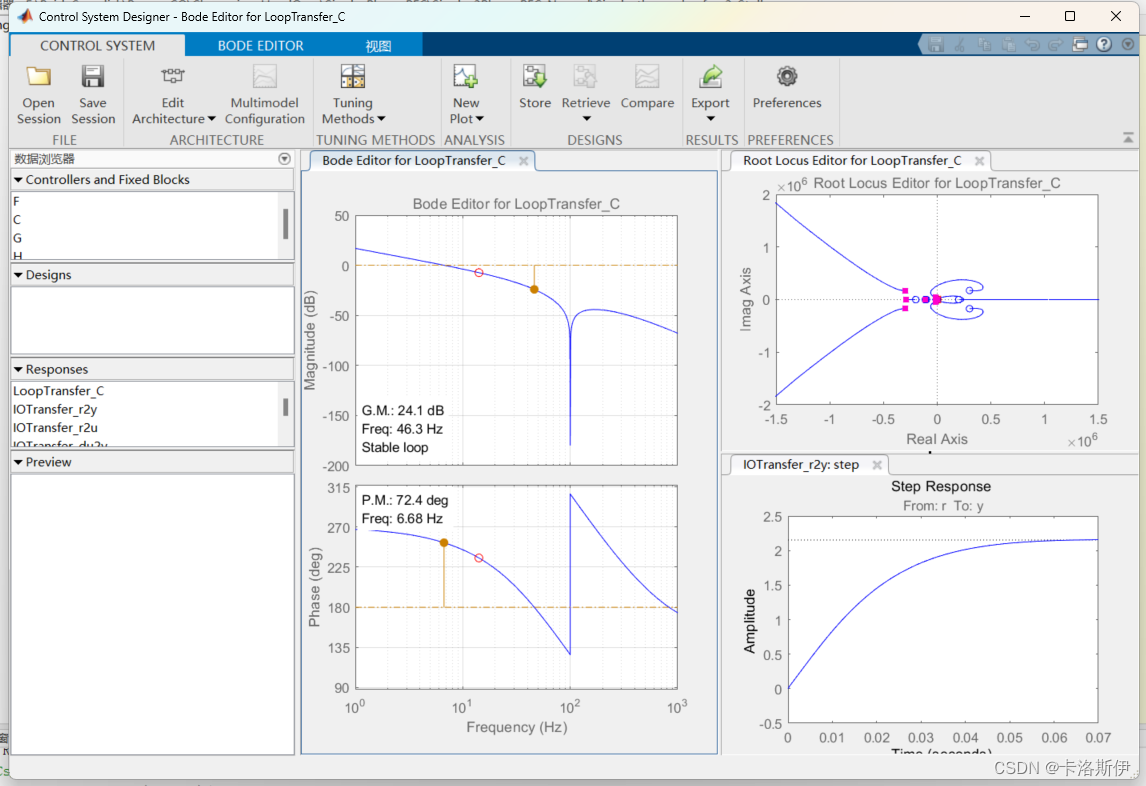
从电流环的传递函数就可以看出来,在设计电流环补偿器的时候,输出的电压会有很大的影响,只用一组控制参数是很难满足宽电压范围的需求的。
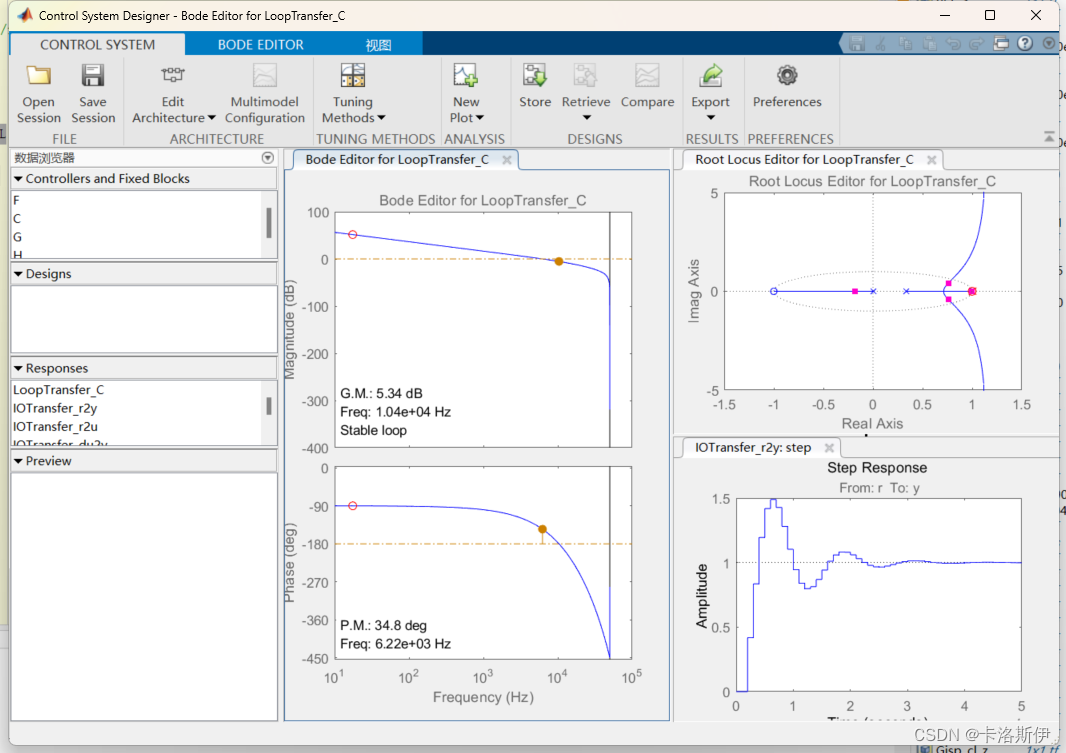
Vo=600V的带宽
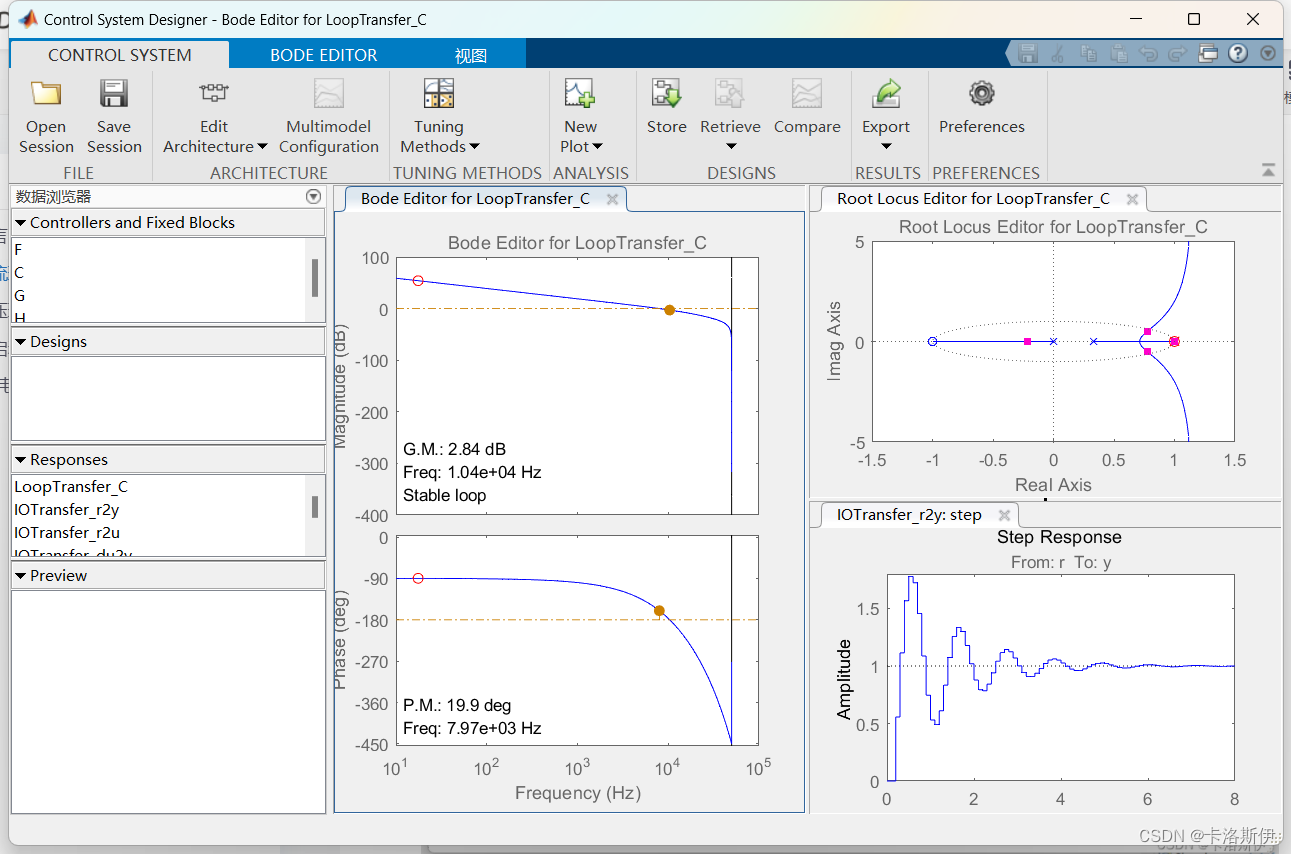
Vo=800V的带宽
 Vo=400V的带宽
Vo=400V的带宽
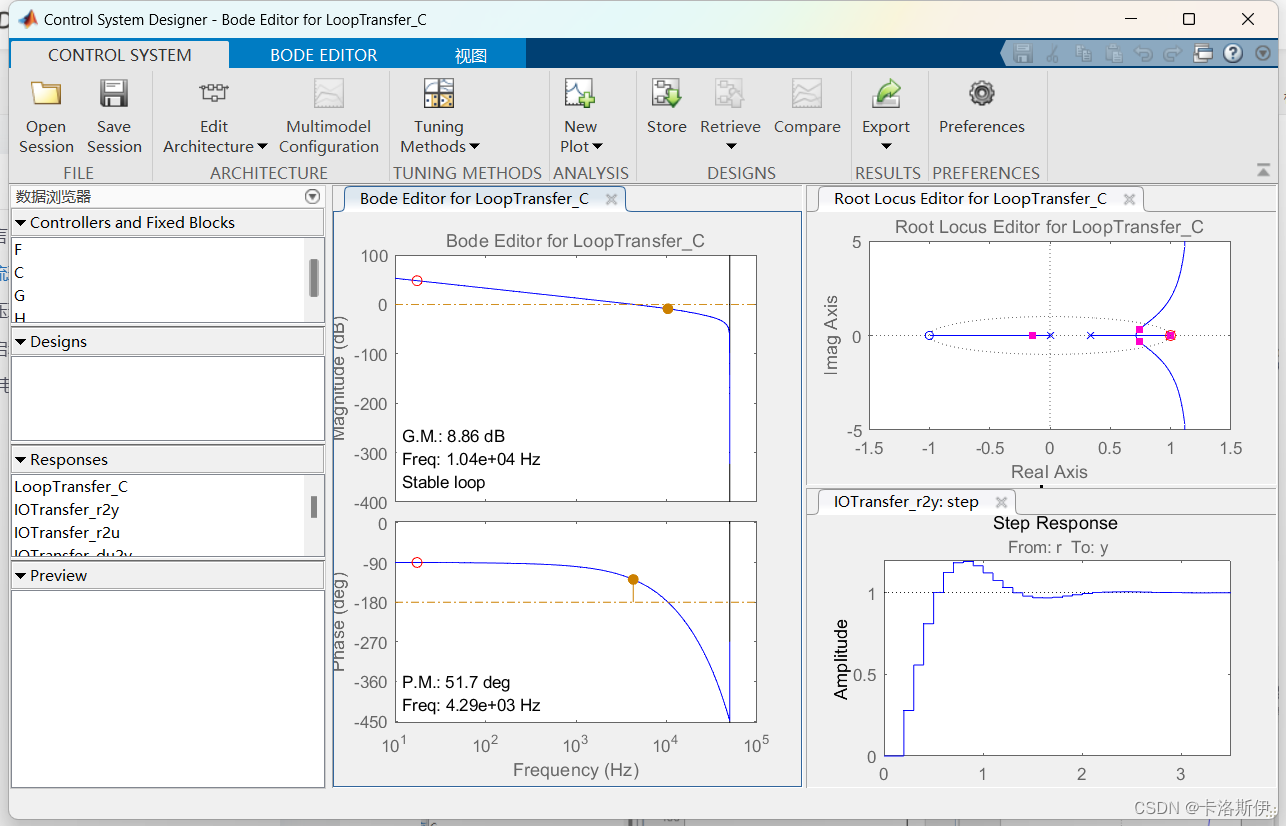
同样的补偿器和参数,输出电压越高,系统的带宽越大,控制效果表现出来就是高电压的时候系统稳定性差,低电压带宽不够。带宽不够THD也会变差。解决办法就是在稳态的时候根据输入电压动态调整补偿器的参数,保证每个电压范围带宽一致。
电压环参数优化
电压环带宽一般5-10Hz左右,电压环这个问题搞了挺久,下面来分析一下。


其他没什么好说的,电压环的带宽比较低,变化在个位数。而且负载的大小对电压环的带宽影响也会很大。实际调试中遇到一个问题:空载和满载的电压环控制效果不一样,导致空载启动容易失控。空载电压波动大,加一点负载就好了!
同样的电压环补偿器参数,满载的带宽是6Hz
空载的时候电压环不到1hz,启动稳定后很容易失控。

最后解决的办法也是动态调整电压环参数
如下黄色给定电压,蓝色反馈电压,空载运行一会儿后加负载能稳定控制

软启动优化
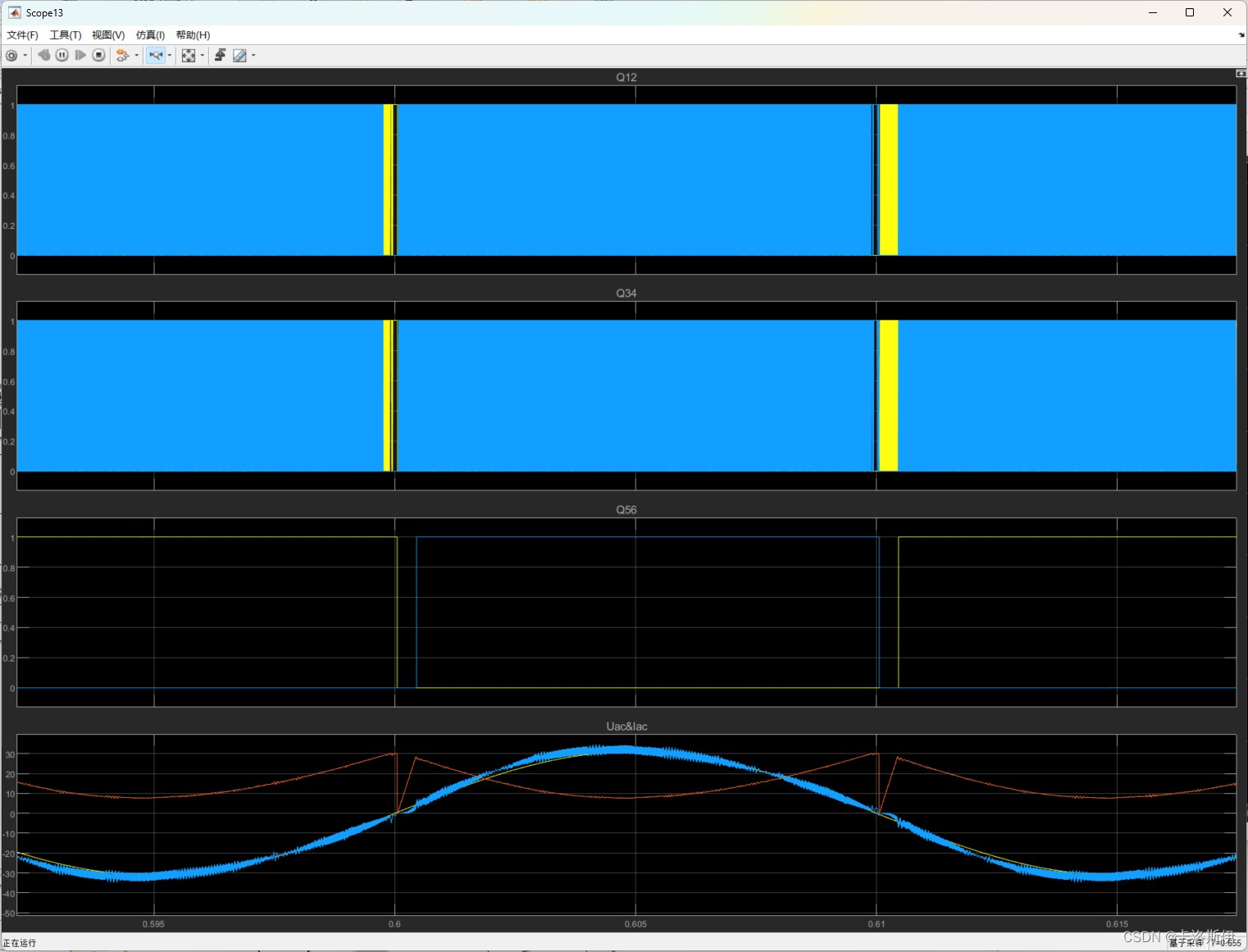
软启动没什么好说的,就是为了抑制过零点的尖峰电流,下面这个图出场率很高
参考TI的时序,判断过零点的时候开环增大占空比后再转到闭环控制就行了。这个时序给慢管Q1在过零点之前提前关了。
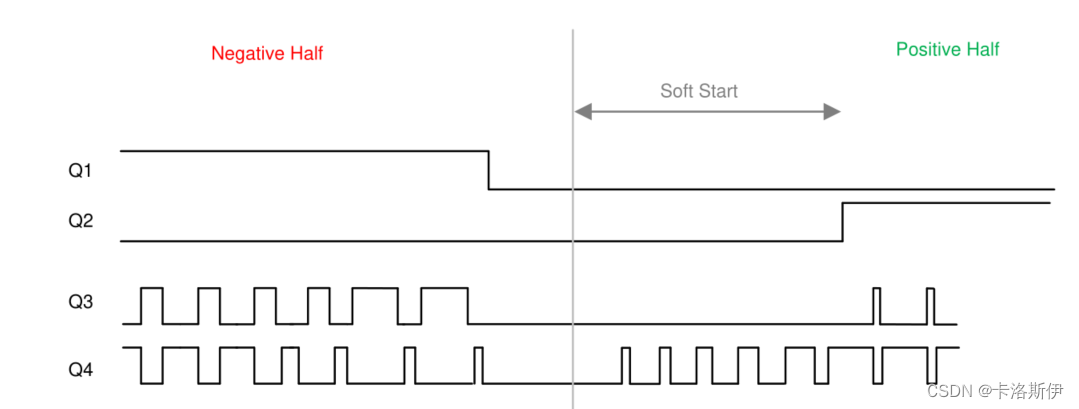
不过实测下来提前关和过零时刻关效果没什么区别,保证开环的占空比从小到大就行了。实际测试下来200us的开环时间就差不多了。仿真效果如下,如果时间太长,THD是会受影响的,太小也不好,根据实际硬件情况调整即可。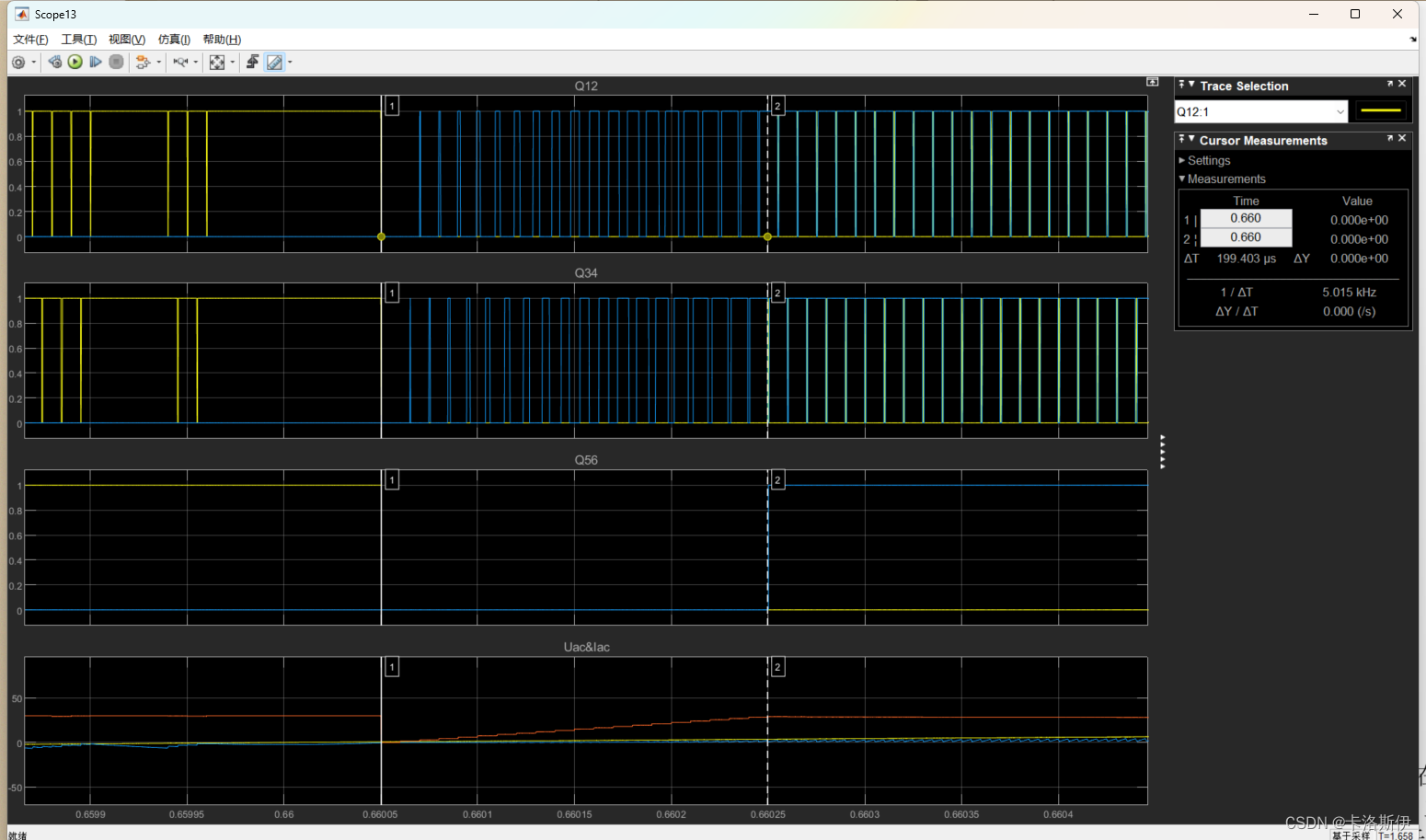
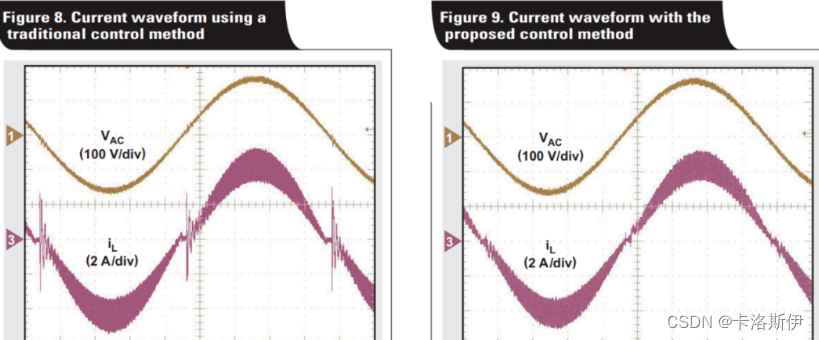
AC电压电流相位不一致优化
仿真如下,电感电流超前于电网电压相位,相位不一致也会影响到系统的THD。原因是:控制环路中输入导纳在低频处是存在90°超前,正是这个原因导致了CCM的电感电流超前。参考文献里有推导的结果,这里直接讲解决方法。
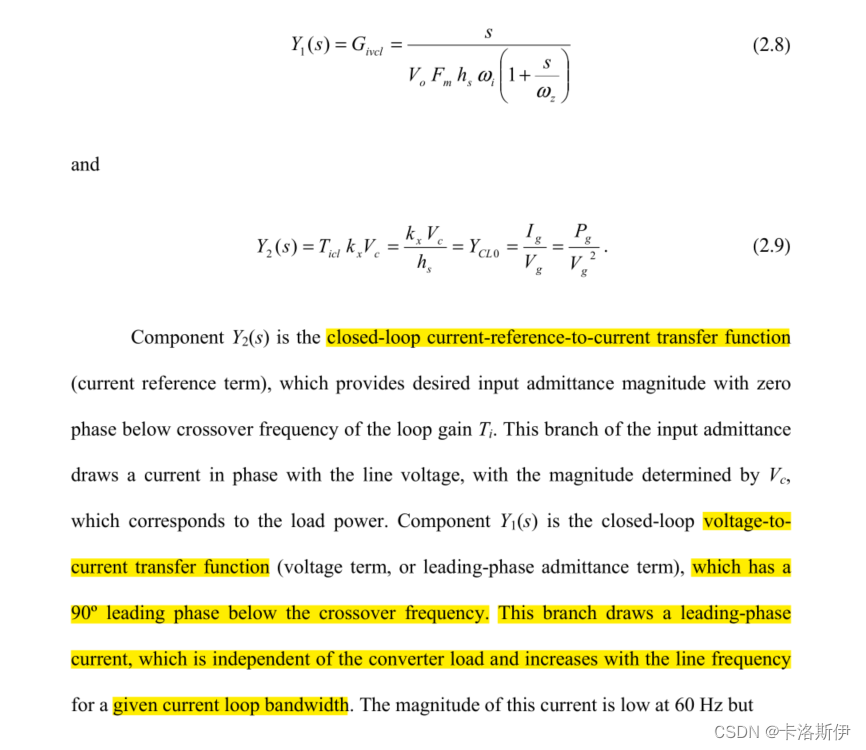
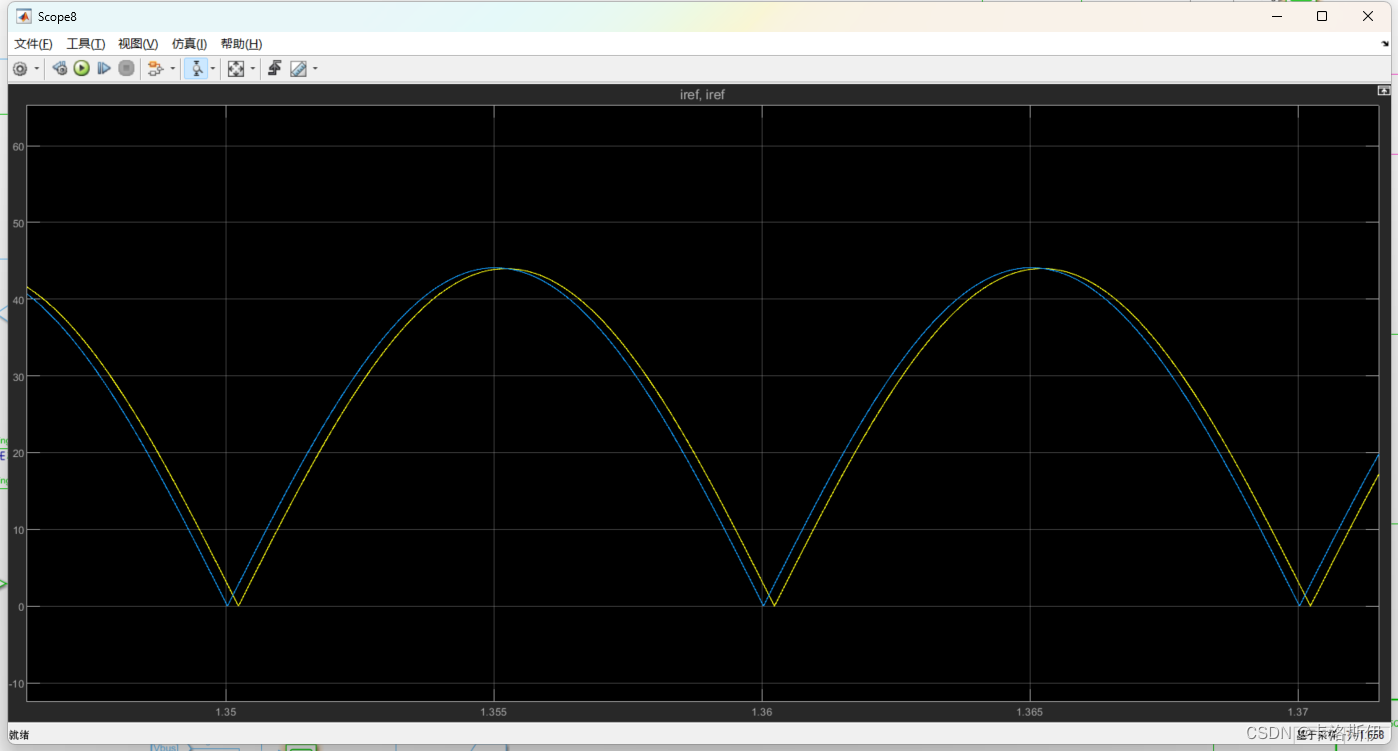
一种解决方法是加一阶低通滤波,让电流环指令滞后,别一种就是文献里面说的去掉Y(1)项,具体参考文献就知道了。实际中通过添加一阶低通滤波器效果也很好,仿真如下:添加完低通滤波后,电流环指令滞后,这样电流相位就能更接近电压相位,除低THD。
参考文献:GENERALIZED AVERAGE-CURRENT-MODE CONTROL OF SINGLE -PHASE AC-DC BOOST CONVERTERS WITH POWER FACTOR CORRECTION
总结
经过各种手段的优化,最后额定负责下THD从3.15%降到了2.5%。出于成本的考虑,最后没有用均流控制,而是用的总电流,如果采用均流控制应该THD会更好。