目录
前言
目前正在做双向交错CCM图腾柱无桥单相PFC的项目,硬件拓扑兼容三相和单相的PFC,三相PFC功能目前已经完成,准备把单相的PFC学习和开发过程记录一下,以及后面可能会踩到的坑,整个开发过程都是基于模型的开发,就是常说的MBD,应用算法层都是Simulink自动代码生成,在学习之前选择一份参考文档是很重要的,这里以Ti的这个文档做参考,把系统细分,一个问题一个问题解决
Design Guide: TIDM-2008/TIDM-1007
Bidirectional Interleaved CCM Totem Pole Bridgeless PFC
Reference Design Using C2000™ MCU
系统硬件架构
Ti的硬件结构是三组并联(三组快管+一组慢管),三组并联

项目实际的硬件结构为兼容三相PFC,且考虑到先给母线电容充电,选择通过继电器控制充电过程和工作模式(单相或者三相)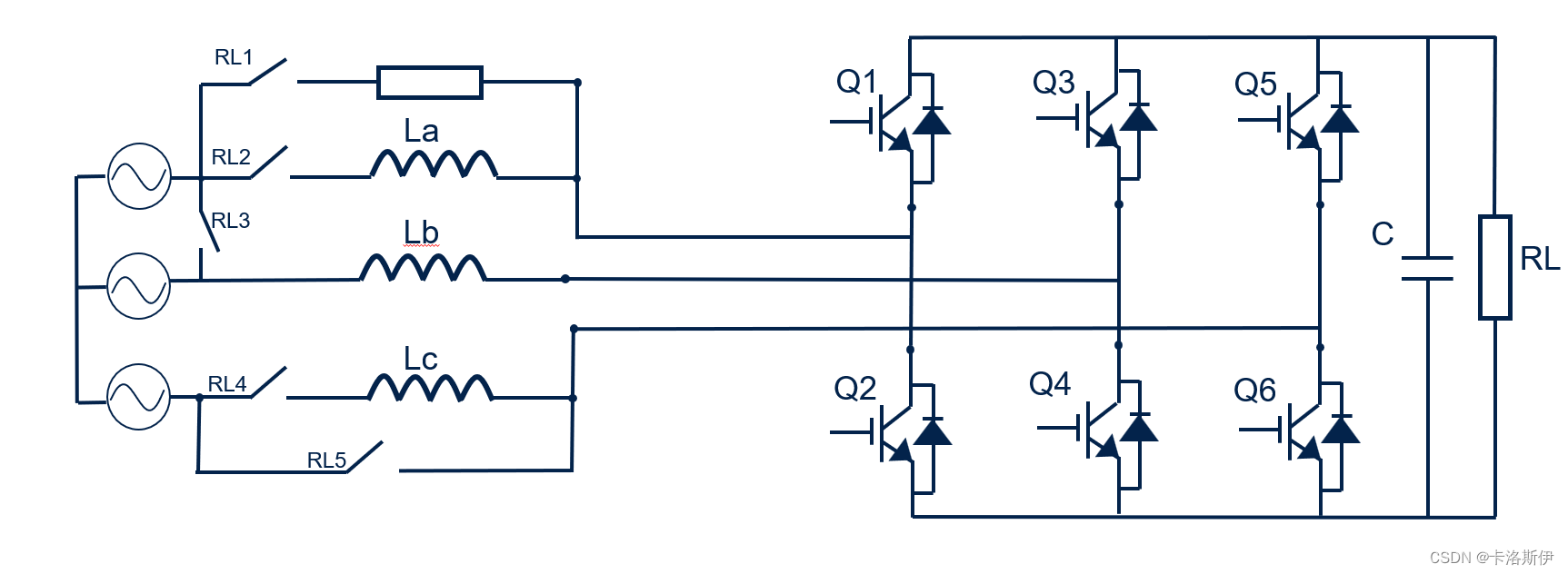
当选择单相工作模式时继电器1,5先导通,给母线电容充电 ,然后再闭合2,3。Q1-Q4作为快管,Q5和Q6作为慢管

且由于三相PFC是对三个电感电流进行采样,为了兼容,单相PFC需要对ab两个电感电流进行采样,控制上就需要两个电感电流,这样也可以实现均流控制。
系统软件架构
根据系统硬件结构可以在Simulink里面搭建硬件仿真电路,再设计系统软件,在实现仿真就要知道发波时序:

如果是两组并联的话PWM相位差180度,三组就是120度,这里我们使用的是相位差180度的PWM发波方式。
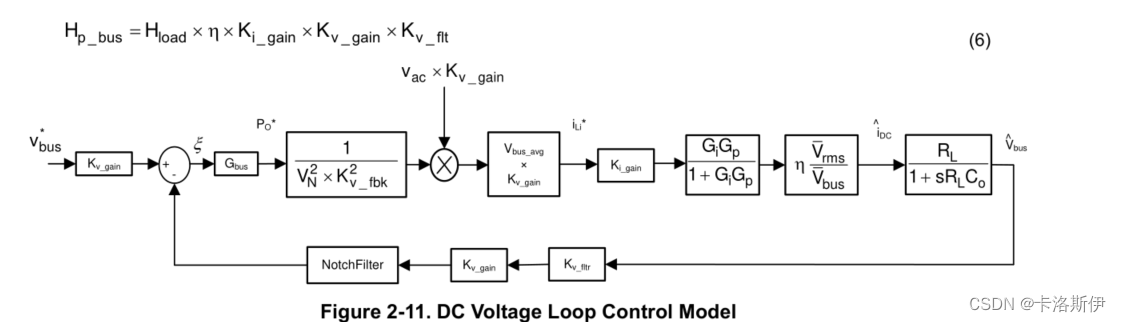
系统软件框图:

框图上,是对交流总电流进行采样控制,用到了SOGI锁相环,Notch Filter, 过零点软启动
从框图可以看出,要实现整个仿真系统并在实际电路上实现需要解决以下问题:
1. PWM发波时序逻辑
实际硬件需要相位差180度
2. SOGI锁相环
通过锁相环得到电压相位,并进行正负周期和过零点判断
3. 电流内环

4. 电压外环
Notch Filter由于输出的Bus电压有一个100Hz的公频波动,会影响到电压环的工作,需要用陷波滤波器对其进行抑制,刚刚好之前有用过:
Simulink 窄带陷波滤波器(Notch filter)仿真到代码生成_simulink 陷波滤波器_卡洛斯伊的博客-CSDN博客
5. 过零点软启动
避免由于功率管体二极管反向恢复造成的尖峰电流

6. 系统状态机
负责状态切换,如预充电,故障管理,状态反馈等
仿真实现
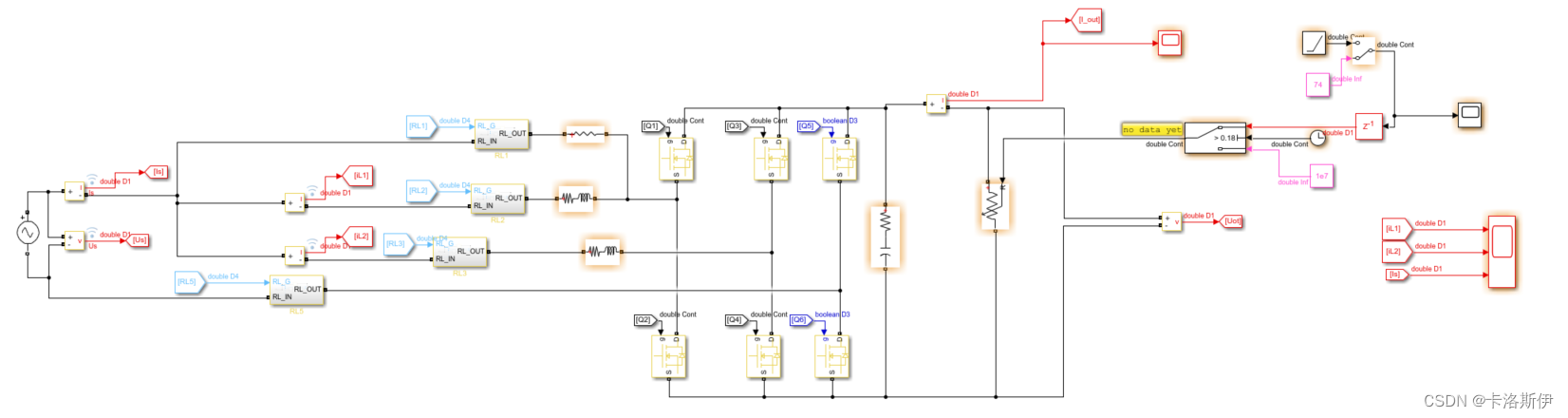
仿真系统如下:
包含了硬件系统,控制指令,PWM发波,控制系统,其中控制系统包含了状态机,电压电流环,锁相环,过零判断等

根据实际需求构建系统电路:
硬件拓扑如下:
包含了继电器开关,充电限流电阻,电感模型包含等效串联电阻,输出滤波电容也包含了ESR,负载采用可变电阻实现仿真时模拟负载变化。
仿真效果
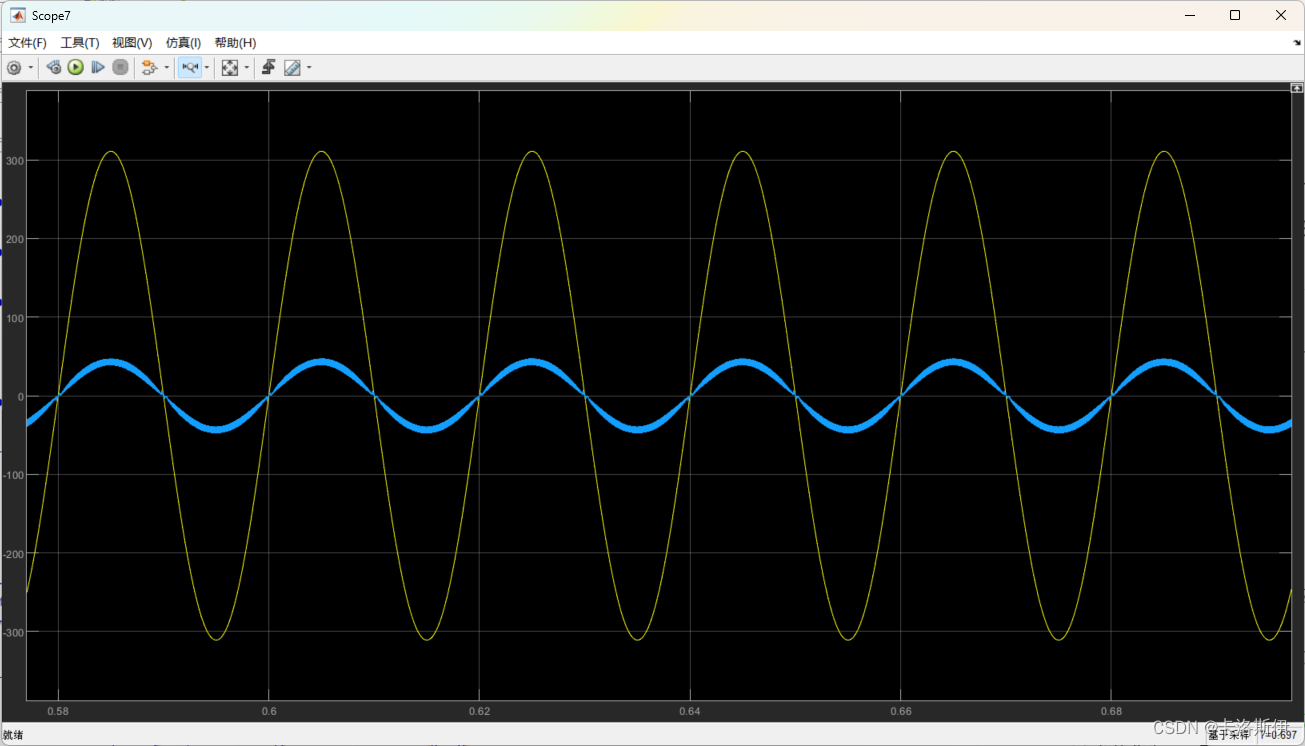
快管和慢管仿真效果,交流电压和电流波形如下:
通过总电流进行控制(模拟电感1和2参数不同),效果如下:
均流控制前: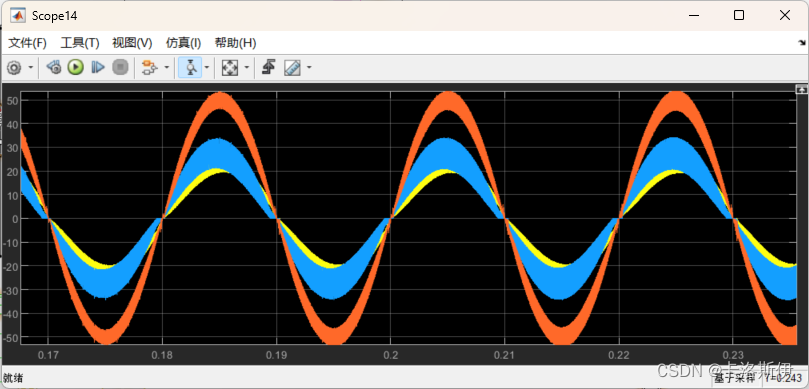
均流控制的话就可以看到L1和L2电流完全重合在一起了(仿真的电感L1和L2感值和阻值是不一样的),通过采用均流控制两者电流完全重合了。这里也是模拟了实际硬件电路电感之前是存在误差的,不可能百分之百一样,采用均流控制的话电感L1,L2电流一样。
均流控制后:

电流很理想是因为Simulink的功率器件是理想的,实际中在过零点的时候会出现二极管反向恢复产生的电流尖峰,这时候就需要软启动了
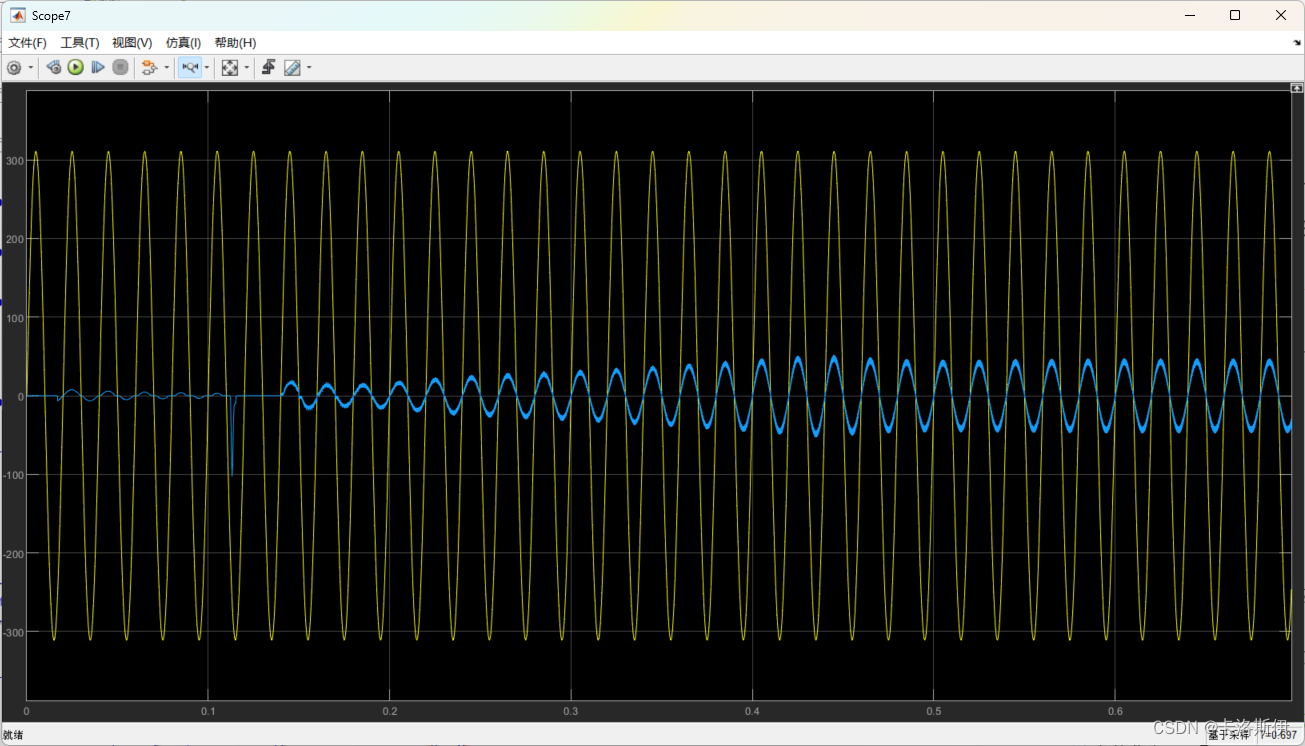
启动电压波形:
预充电--->电压缓慢上升--->到达目标电压
黄色是输入参考电压,蓝色是输出Bus电压

在送入电压环之前对Bus电压做了一个Notch filter,不然电压环容易震荡

启动电流波形:
总结
大体把一些功能实现了,后面再对细节部分进行总结,后续添加了SOGI_PLL.