其中表示为一个batch中有两张图片,且每一张图片中有两个通道(channel)。数字是每一个channel对应的。
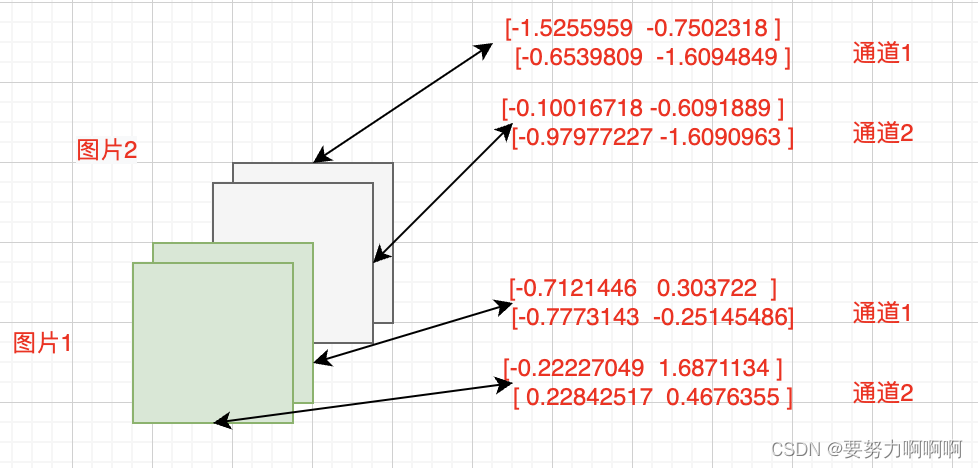
根据代码,可以观察出来首先是计算该batch中所有图片的通道1的均值和方差,然后再依次计算通道二的均值和方差。以及样本标准差。

接下来,使用更新公示来对标准化之后的数据进行更新。以及对新的均值和方差进行修改。
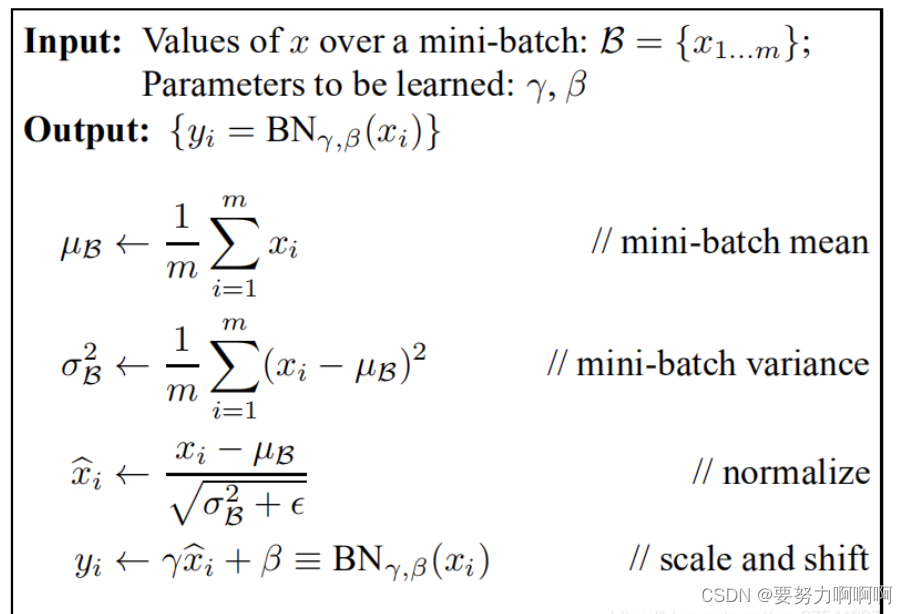
下面是参考公式以及代码

import numpy as np
import torch.nn as nn
import torch
def bn_process(feature, mean, var):
feature_shape = feature.shape
for i in range(feature_shape[1]):#遍历的是channel
# [batch, channel, height, width]
feature_t = feature[:, i, :, :]
mean_t = feature_t.mean()#依次进行计算,首先计算第一个通道的均值和方差。
# 总体标准差
std_t1 = feature_t.std()
# 样本标准差
std_t2 = feature_t.std(ddof=1)
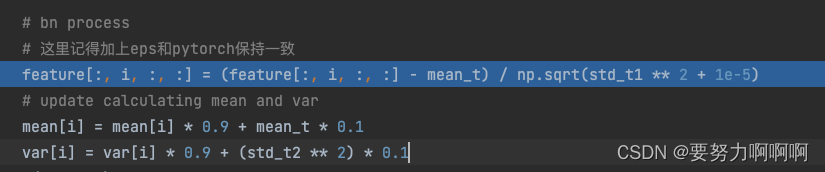
# bn process
# 这里记得加上eps和pytorch保持一致
feature[:, i, :, :] = (feature[:, i, :, :] - mean_t) / np.sqrt(std_t1 ** 2 + 1e-5)
# update calculating mean and var
mean[i] = mean[i] * 0.9 + mean_t * 0.1
var[i] = var[i] * 0.9 + (std_t2 ** 2) * 0.1
print(feature)
# 随机生成一个batch为2,channel为2,height=width=2的特征向量
# [batch, channel, height, width]
torch.manual_seed(1)
feature1 = torch.randn(2, 2, 2, 2)
# 初始化统计均值和方差
calculate_mean = [0.0, 0.0]
calculate_var = [1.0, 1.0]
print(feature1.numpy())
# 注意要使用copy()深拷贝
bn_process(feature1.numpy().copy(), calculate_mean, calculate_var)
bn = nn.BatchNorm2d(2, eps=1e-5)
output = bn(feature1)
print(output)
学习参考连接:
https://blog.csdn.net/wzk4869/article/details/127261308
https://blog.csdn.net/qq_37541097/article/details/104434557