pcmerge(ptCloudA,ptCloudB,gridStep)合并两个点云,并进行体素下采样
体素下采样:减少点云数据,集中点云数量。参考链接点云体素下采样 ❤️(体素质心 | 体素中心)
点云滤波—体素网格滤波器
体素网格滤波器:
体素的概念类似于像素,像素是二维的一个个点,而体素则是三维的一个个小空间。在输入点云数据上创建一个个3D体素网格(将体素网格视为一组空间中的微小3D小空间)。 然后,在每个体素中,所有存在的点将用它们的质心或者中心近似。 用体素的质心比用体素的中心直接代替它们要慢一些,但它可以更准确地保持宏观的几何外形。
程序:
%点云的合并
% pcmerge(ptCloudA,ptCloudB,gridStep)合并两个点云,并进行体素下采样
clc;clear all;close all;
%读取两个点云
ptCloudA = pcread('E:\程序库\点云\规则点云\1.pcd');
ptCloudB = pcread('E:\程序库\点云\规则点云\2.pcd');
%点云的合并
ptCloudC=pcmerge(ptCloudA,ptCloudB,0.001);%设置体素滤波器的边长为0.001m
%可视化
figure;
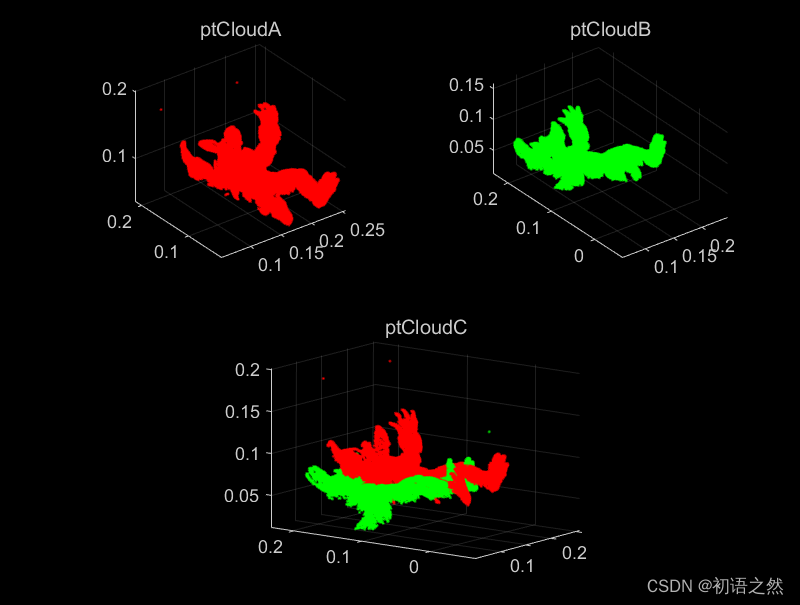
subplot(221);pcshow(ptCloudA);title('ptCloudA');
subplot(222);pcshow(ptCloudB);title('ptCloudB');
subplot(2,2,[3,4]);pcshow(ptCloudC);title('ptCloudC');
运行结果: