目录
1.算法仿真效果
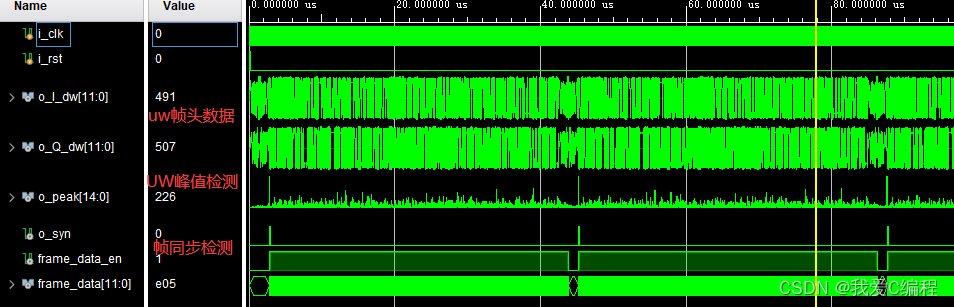
本系统进行了Vivado2019.2平台的开发,仿真结果如下所示:

2.算法涉及理论知识概要
UW序列是一种特殊类型的伪随机二进制序列,通常用于数据帧检测和帧同步。UW序列具有以下特性:
平衡性:UW序列中的1和0的数量大致相等,确保序列具有良好的自相关性。
低互相关:不同UW序列之间的互相关性非常低,减少误检测的可能性。
长周期:UW序列的周期非常长,保证在数据传输过程中不会重复。
在数据帧检测中,发送端会将数据帧的头部与UW序列进行异或操作,接收端通过检测UW序列的出现来识别数据帧的起始位置和帧同步。
数据帧通常由头部(header)、数据(payload)和尾部(tail)组成。在发送端,数据帧的头部会与UW序列进行异或操作,然后发送给接收端。接收端会通过以下过程来检测数据帧的起始位置和帧同步:
接收数据流并与UW序列进行互相关运算,得到互相关结果R。
将R与阈值进行比较,如果超过阈值,则认为找到了帧同步。
1 发送端实现
在发送端,首先确定数据帧的格式,包括头部、数据和尾部的长度。然后,选择一个合适的UW序列,并将数据帧的头部依次与UW序列进行异或操作。将得到的带有UW序列的头部发送给接收端。
2 接收端实现
在接收端的FPGA中,实现数据帧检测和帧同步需要进行以下步骤:
选择UW序列:在接收端选择与发送端使用的UW序列相同的UW序列。
互相关运算:将接收到的数据流与选定的UW序列进行互相关运算,得到互相关结果R。
阈值判定:将R与预先设定的阈值进行比较。阈值的选取要基于信噪比和系统性能考虑,通常通过实验来确定。
帧同步:当R超过阈值时,表示找到了帧同步,接下来可以开始解析数据帧。
3.Verilog核心程序
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2023/07/24 21:40:51
// Design Name:
// Module Name: TEST
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module TEST();
// Inputs
reg i_clk;
reg i_rst;
// Outputs
wire [11:0] o_I_dw;
wire [11:0] o_Q_dw;
wire[14:0] o_peak;
wire o_syn;
wire frame_data_en;
wire [11:0] frame_data;
// Instantiate the Unit Under Test (UUT)
UW_1_sycn uut (
.i_clk (i_clk),
.i_rst (i_rst),
.o_I_dw (o_I_dw),
.o_Q_dw (o_Q_dw),
.o_peak (o_peak),
.o_syn (o_syn),
.frame_data_en(frame_data_en),
.frame_data (frame_data)
);
initial begin
// Initialize Inputs
i_clk = 1;
i_rst = 1;
// Wait 100 ns for global reset to finish
#100
i_rst = 0;
// Add stimulus here
end
always #5 i_clk=~i_clk;
endmodule
00_031m4.完整算法代码文件
V