模型生成命令:
rosrun gazebo_ros spawn_model -h调用gazebo:
rosrun gazebo_ros gazebo可以拖动一些立方体,保存环境点file-save world as
insert里面可以添加插件
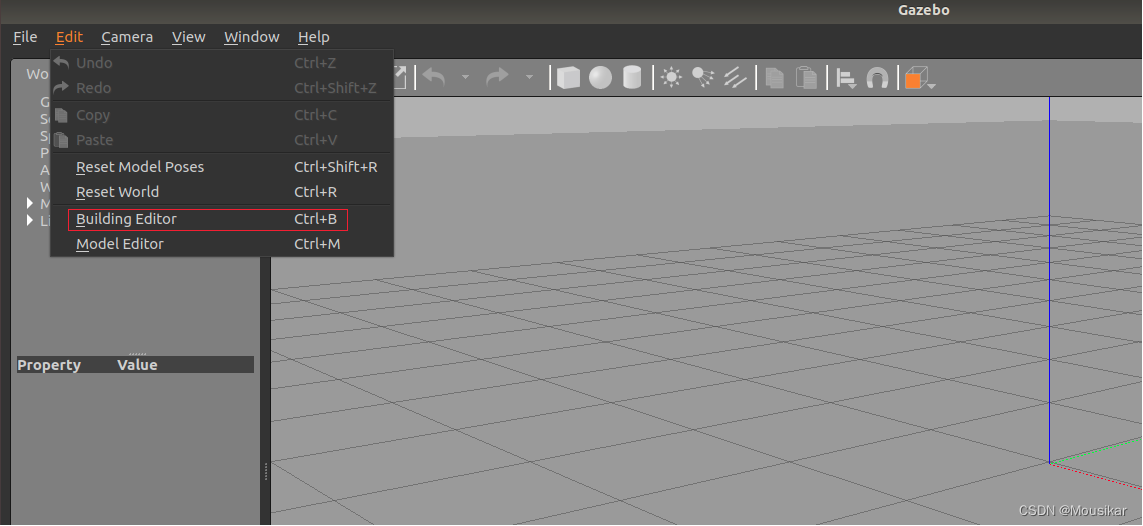
启动 gazebo 打开构建面板,绘制仿真环境
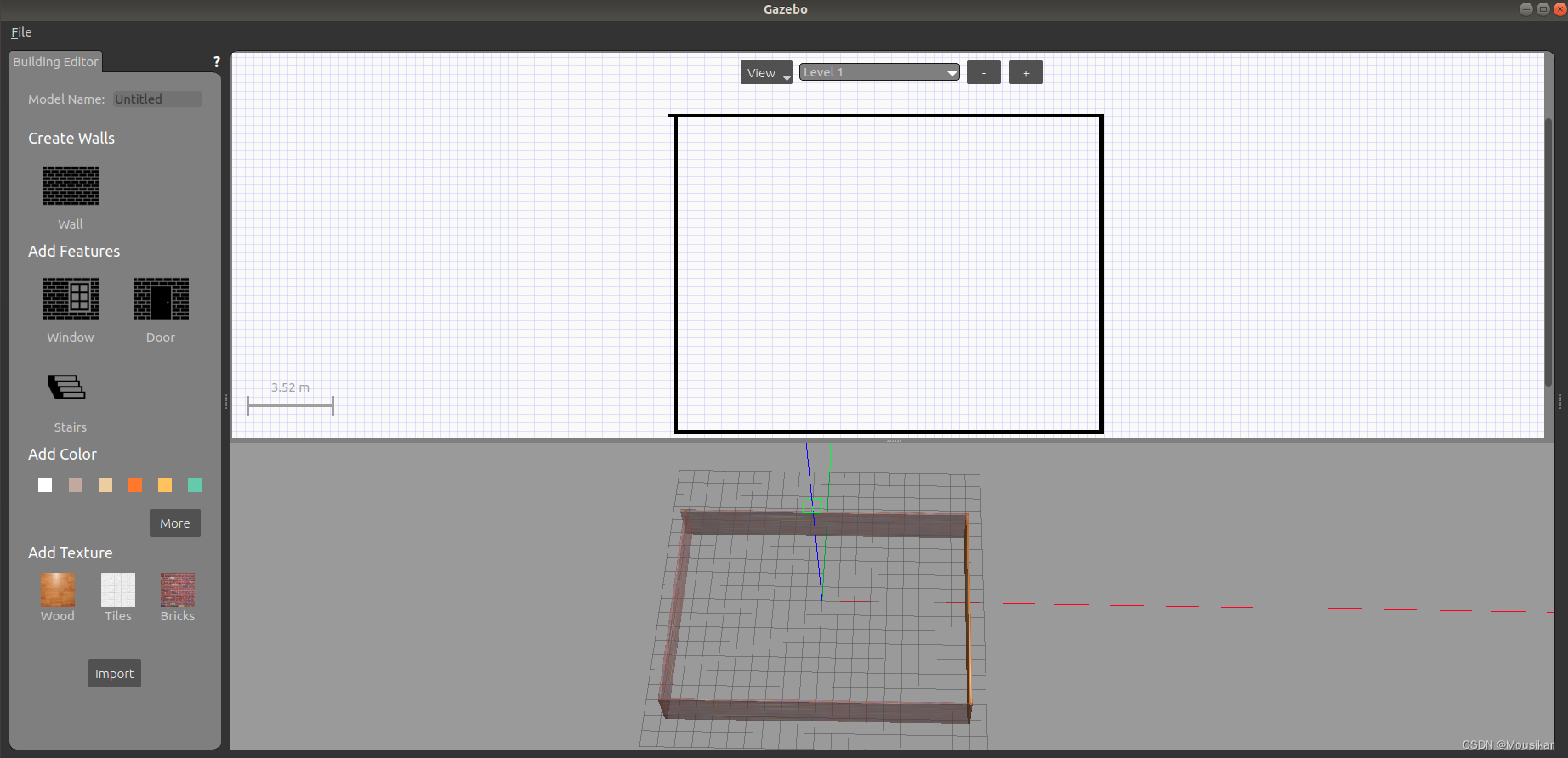
点击: 左上角 file ---> Save (保存路径功能包下的: models)
模型生成命令:
rosrun gazebo_ros spawn_model -h调用gazebo:
rosrun gazebo_ros gazebo可以拖动一些立方体,保存环境点file-save world as
insert里面可以添加插件
启动 gazebo 打开构建面板,绘制仿真环境
点击: 左上角 file ---> Save (保存路径功能包下的: models)