实时目标检测是计算机视觉领域的重要任务之一,它要求在图像或视频中快速准确地检测和定位目标物体。YOLO(You Only Look Once)是一种流行的实时目标检测算法,以其高速和较好的准确度而受到广泛关注。本文将介绍YOLO算法的实现原理,重点讨论其如何在速度和准确度之间进行平衡。
YOLO如何实现实时目标检测?它的速度和准确度如何平衡?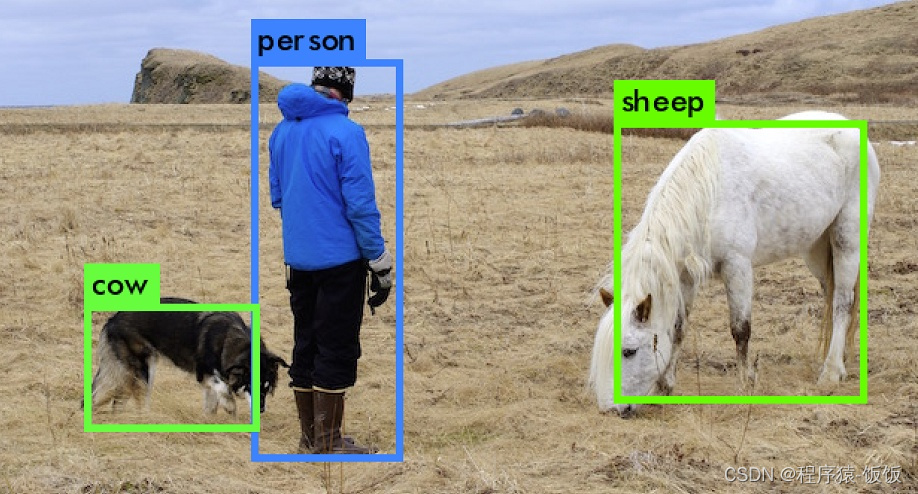
YOLO算法概述
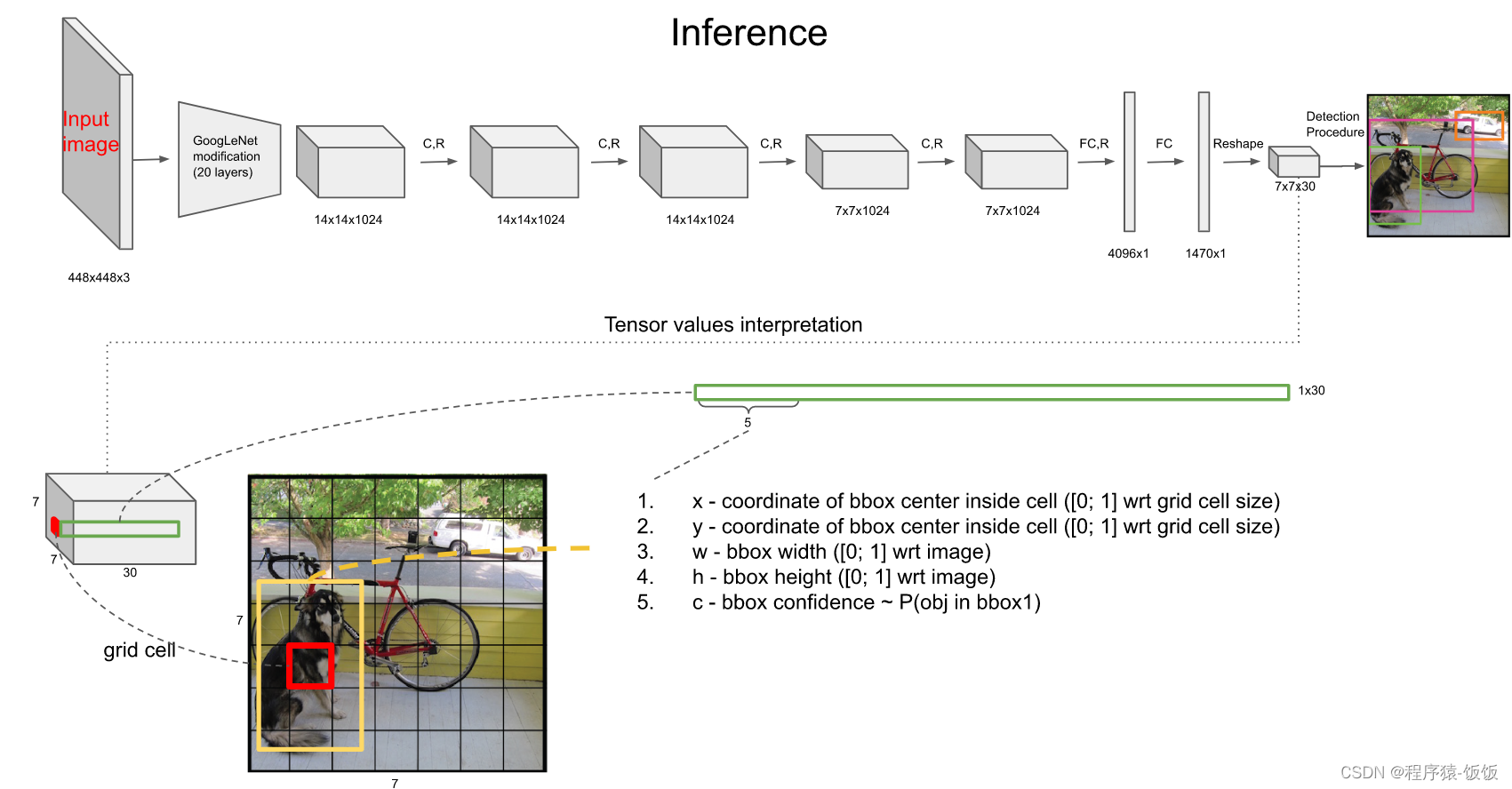
YOLO算法是一种基于深度学习的目标检测算法,其核心思想是将目标检测任务转化为一个回归问题。与传统的目标检测算法相比,YOLO算法具有以下特点:
-
单阶段检测:YOLO一次性对整个图像进行检测,不需要候选区域提取的过程,因此速度较快。
网络设计:YOLO采用卷积神经网络结构,如YOLOv3中的Darknet,提供了较好的特征提取能力。 -
多尺度预测:YOLO在不同层次的特征图上进行目标预测,可以检测不同尺寸的目标。
实时目标检测的挑战
实时目标检测需要在有限的时间内完成目标检测和定位任务,但在保证速度的同时,也要尽可能提高准确度。这是一个权衡问题,因为过于追求速度可能会降低准确度,而追求准确度可能会导致速度下降。 -
速度和准确度的平衡策略
YOLO通过一系列策略来平衡速度和准确度,以实现实时目标检测:
-
特征金字塔:YOLO利用不同尺度的特征图进行目标预测,从而检测不同大小的目标。这种多尺度的预测使得算法对于小目标和大目标都有较好的表现。
-
网络设计:YOLO使用了简化的卷积神经网络结构,减少了参数数量和计算量,提高了速度。同时,网络设计还要考虑特征提取和感受野的平衡,以保证较好的准确度。
-
先验框和锚框:YOLO引入了先验框和锚框的概念,通过预定义的框来辅助目标定位和分类,提高了定位的准确性。
-
NMS(非极大值抑制):YOLO使用NMS来抑制多个重叠的检测结果,避免重复检测同一个目标,提高了准确度。
实时目标检测的应用
YOLO算法的速度和准确度平衡使其在许多实时目标检测应用中得到广泛应用,包括: -
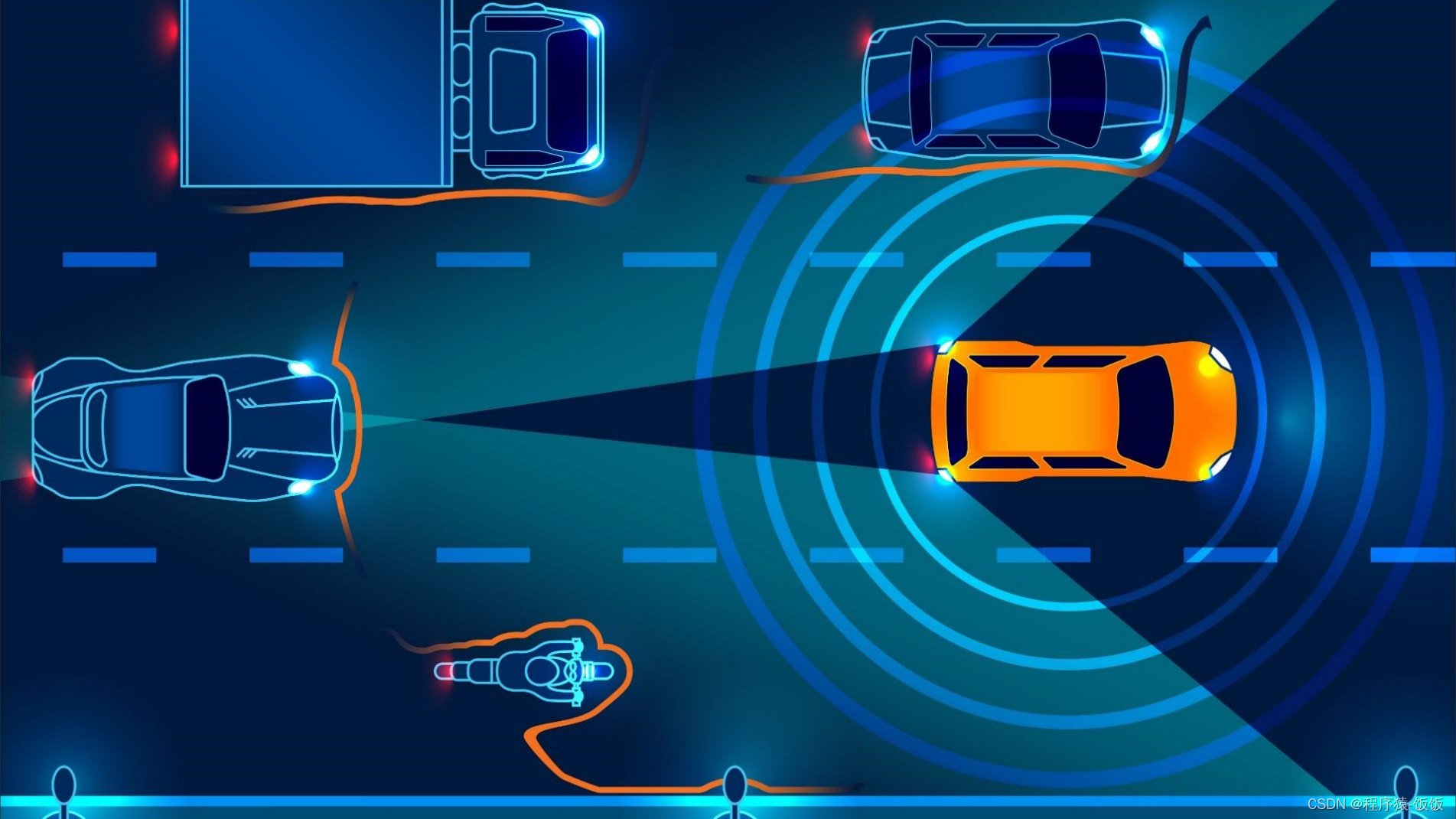
自动驾驶:用于实时检测道路上的车辆、行人和交通标志等,提供环境感知和决策支持。
-
视频监控:用于实时监测场景中的异常行为、人员聚集、目标追踪等,提供安全监控和事件识别。

物体识别和分类:用于实时识别图像或视频中的物体,如商品识别、动物识别等。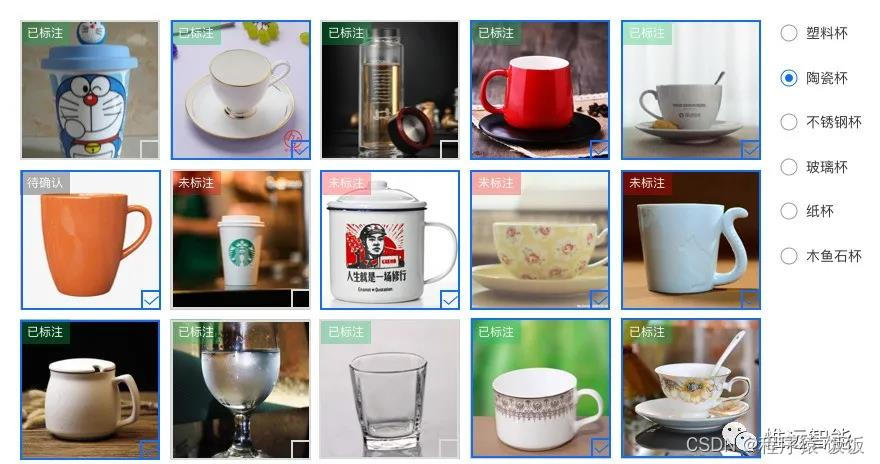
-
增强现实:用于实时识别现实场景中的物体,为增强现实应用提供目标定位和跟踪能力。
-YOLOV1-V8资料up整理的人工智能CV零基础入门资料包
关注公众H:AI技术星球 回复 123 人工智能公开课、论文、面试指导、技术答疑、学习规划***

实时目标检测是人工智能领域的热门研究方向,YOLO算法以其高速和较好的准确度在该领域发挥了重要作用。通过合理的设计和优化,YOLO在速度和准确度之间取得了良好的平衡,成为实时目标检测的首选算法之一。随着技术的不断进步,我们可以期待更多创新和改进,使得实时目标检测在各个领域的应用更加广泛和高效。