NVIDIA CUDA 高度并行处理器编程(四):CUDA性能优化
kernel 函数的执行速度在不同设备上差异很大,这是因为不同设备的资源约束不同。下面将会讨论资源约束的主要类型,以及它们如何限制 kernel 函数的执行性能。在特定设备上,可通过用一种资源代替另一种资源的方式来提高程序的性能。
1.WARP 和线程执行
(二)中写到,CUDA 设备将若干线程捆绑执行。把每个线程块划分成 warp。warp 的执行由 SIMD 硬件完成。
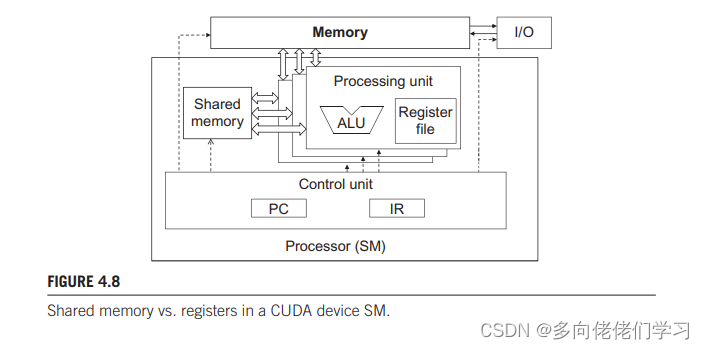
上图说明了 warp 的组织形式。处理器只有一个控制单元进行取指和译码操作,同一个控制信号进入多个处理单元,每个处理单元执行 warp 中的一个线程。由于所有处理单元都由一条指令控制,所以它们执行结果差异就取决于各各单元寄存器中不同的操作数。
线程块根据线程索引划分为 warp。当前所有 CUDA 设备都是每个 warp 包括 32 个线程,线程块根据索引划分为 warp ,不同维度的线程块划分形式不同:
-
一维:warp n 从线程 32 x n 开始到32(n + 1)- 1 结束,对于线程数不是 32 倍数的线程块,最后一个 warp 将会用别的快中的线程填充至 32 个。例如一个块有 48 个线程, warp 0 从线程 0 - 31,warp 1 从线程 32 - 63,后16个线程是用其他块中的线程来填充的。
-
二维:在划分 warp 前会把维度映射到一个线性顺序中,可以将二维线程块中每个线程看成成 TthreadIdx.y,threadIdx.x 的形式。对应的一维形式如下图下部,前四个对应 threadIdx.y = 0 的线程,按 threadIdx.x 递增的顺序排列,第五个到第八个对应 threadIdx.y = 1 的线程,以此类推。在这个例子中,16个线程组织成半个 warp ,会用另外 16 个线程填充这个 warp 。
-
三维:会先将 threadIdx.z = 0,的二维线程块线性排列,再将 threadIdx.z = 0,的二维线程块线性排列,以此类推。

CUDA warp 中的线程可能同时执行相同的指令,此时效率最高,也可能执行不同的指令,此时效率会降低。书上的说法就是,当一个 warp 中的所有线程处理他们的数据时采用相同的控制流路径,它的工作效率最高,例如在一个 if-else 结构中,所有线程都执行 if 部分或 else 部分时。当一个 warp 中的线程分别采用不同的控制流路径时,warp 按顺序执行这些路径,增加执行时间,例如一个 warp 中的线程有些执行 if 语句,有些执行 else 语句时。
当同一个 warp 中的线程执行控制流中的不同路径时,这些线程在执行过程中就出现了分支(diverge)。分支出现时硬件需要遍历其他路径,确保所有线程能自己做出选择。假定一个 warp 中不同的线程要执行的 for 循环的次数不同,可能会迭代 7, 8次,所有线程都会经历前 7 次迭代,执行第 8 次迭代会使用两条路径,继续迭代的线程通过其中一条路径,不需要继续迭代的线程会经过另一条路径。
求和归约算法(一):
并行归约(Reduction)是一种很基础的并行算法,简单来说,我们有N个输入数据,使用一个符合结合律的二元操作符作用其上,最终生成1个结果。这个二元操作符可以是求和、取最大、取最小、平方、逻辑与或等等。
由于加法的交换律和结合律,数组可以以任意顺序求和。所以我们会自然而然产生这样的思路:首先把输入数组划分为更小的数据块,之后用一个线程计算一个数据块的部分和,最后把所有部分和再求和得出最终结果。
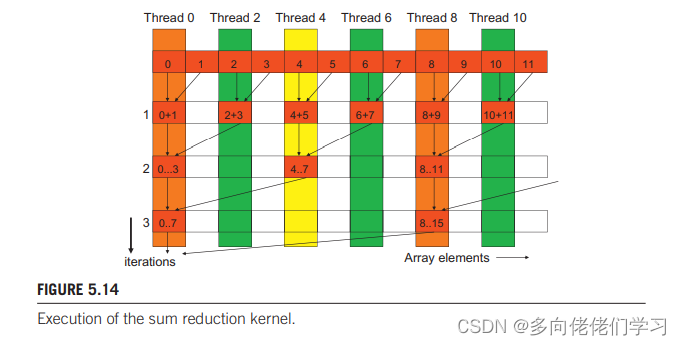
上面演示了单个线程块内的归约求和过程,结合下面的代码解释:
- 13行第一轮循环,对应上图的第二行,数组中索引为偶数的值被对应部分和替代。
- 第二轮循环,对应上图第三行,数组中索引为 4 的整数倍的值被对应部分和替代。
- 第三轮循环,对应上图第四行,数组中索引为 8 的整数倍的值被对应部分和替代。
- …
- 直至 stride 的值为 blockDim.x 的一半,这一步块内和就计算完了,并存储在threadIdx.x 为 0 的线程中。
但对于不同块内的和,就需要将每个块内 threadIdx.x 为 0 的线程的和相加才能求得总的向量和。
归约求和代码(一):
#include<stdio.h>
#include<stdlib.h>
#include<cuda.h>
#define THREAD_LENGTH 256
__global__ void reduceSum(double *d_A, int n){
unsigned int t = threadIdx.x;
__shared__ double partialSum[THREAD_LENGTH];
if(blockIdx.x*blockDim.x + t < n)
partialSum[t] = d_A[blockIdx.x*blockDim.x + t];
else
partialSum[t] = 0;
__syncthreads(); //将数组加载到共享存储器。
for(unsigned int stride = 1; stride < blockDim.x; stride *= 2){
if(t % (2*stride) == 0)
partialSum[t] += partialSum[t + stride];
__syncthreads();
}
/*将每个线程块内 threadIdx.x 为零的线程中的值传回d_A。
主机函数中将会对这几个线程求和,以得到最终的和。*/
if(t == 0)
d_A[blockIdx.x*blockDim.x + t] = partialSum[t];
}
void test(double *A, int n){
double *d_A;
int size = n * sizeof(double);
cudaMalloc(&d_A, size);
cudaMemcpy(d_A, A, size, cudaMemcpyHostToDevice);
reduceSum<<<ceil((double)n/THREAD_LENGTH), THREAD_LENGTH>>>(d_A, n);
cudaMemcpy(A, d_A, size, cudaMemcpyDeviceToHost);
cudaFree(d_A);
double result = 0;
for(int i = 0;i < ceil((double)n/THREAD_LENGTH);++i){
result += A[i*THREAD_LENGTH]; //对每个块内部分和求和
}
A[0] = result; //通过A[0]传回
}
int main(int argc, char **argv){
int n = atoi(argv[1]);
double *A = (double *)malloc(n * sizeof(double));
for(int i = 0; i < n;++i){
A[i] = 1.0;
}
test(A, n);
printf("%lf\n", A[0]);
free(A);
return 0;
}
测试结果如下:
算法分析:
第一轮需要进行 N/2 次加法操作,第二轮需要 N/4 次加法操作,最后一轮只需进行 1 次加饭操作。总共有 log2(N)轮计算。kernel 函数完成的加法操作总数为 N/2 + N/4 + N/8 + … + 1 = N-1。因此归约算法的计算复杂度为 O(N)。很明显时间复杂度为 O(log2N)。
上面的 kernel 函数中明显有分支。同一个 warp 在全程循环中都有两个控制流路径,即一部分满足 if 条件参与运算,另一部分不满足 if 条件不参与运算。
求和归约算法(二):
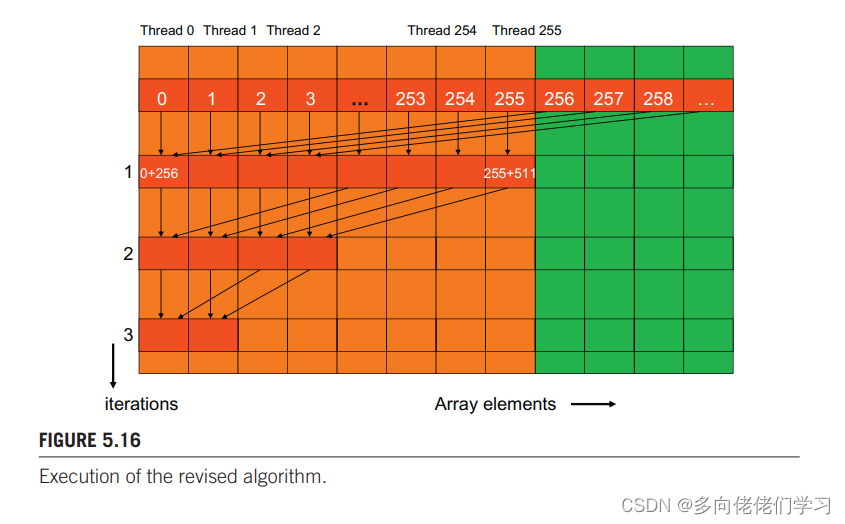
继续结合下面的代码解释。
- 第一轮循环中不在采用相邻元素相加,两个相加元素中间的距离是每一部分大小的一半。把 stride 初始化为线程块大小的一半,能实现上述操作。
- 第二次迭代时 stride 为线程块大小的 1/4,即相加元素之间的距离是线程块大小的 1/4。
- …
- 最后一次迭代 stride 大小为1。
kernel 函数:
__global__ void reduceSum(double *d_A, int n){
unsigned int t = threadIdx.x;
__shared__ double partialSum[THREAD_LENGTH];
if(blockIdx.x*blockDim.x + t < n)
partialSum[t] = d_A[blockIdx.x*blockDim.x + t];
else
partialSum[t] = 0;
__syncthreads(); //将数组加载到共享存储器。
for(unsigned int stride = blockDim.x / 2; stride > 0; stride /= 2){
if(t < stride)
partialSum[t] += partialSum[t + stride];
__syncthreads();
}
if(t == 0)
d_A[blockIdx.x*blockDim.x + t] = partialSum[t];
}
例如有 256 个线程的线程块计算 256 个元素的和,第一次迭代期间,线程 0 ~ 128执行加法语句,即warp 0~3 都执行加法语句,warp 4~7 都不执行加法运算,这就达到了一个 warp 中只有一个控制流路径的效果。但是后几步循环还是需要在一个 warp 中存在两个控制流路径的。
2.全局存储器的宽带
warp 加载数据与运行指令类似,如果一个 warp 的所有线程都执行一条加载指令时,如果这些线程访问的是全局存储器的连续内存单元,此时的访问效率最高,接近全局存储器宽带的峰值。
在介绍如何高效利用存储器宽带前,先来看一下 CUDA C 中多维数组的存储方式:
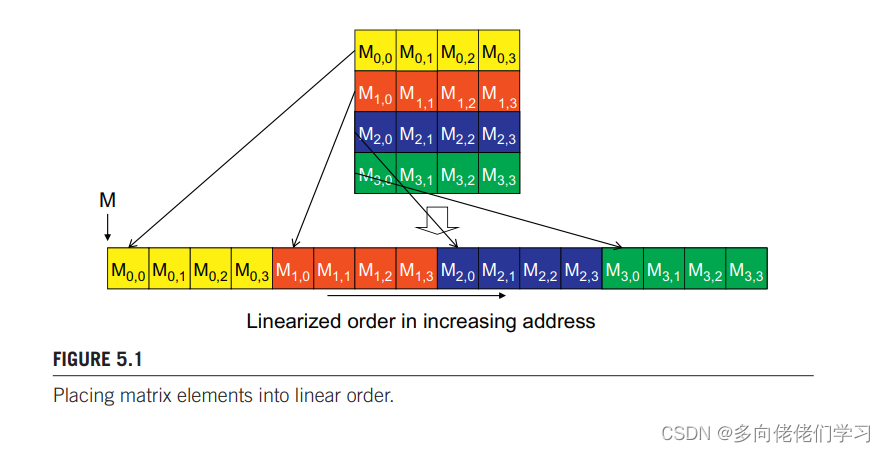
即以行序为主序
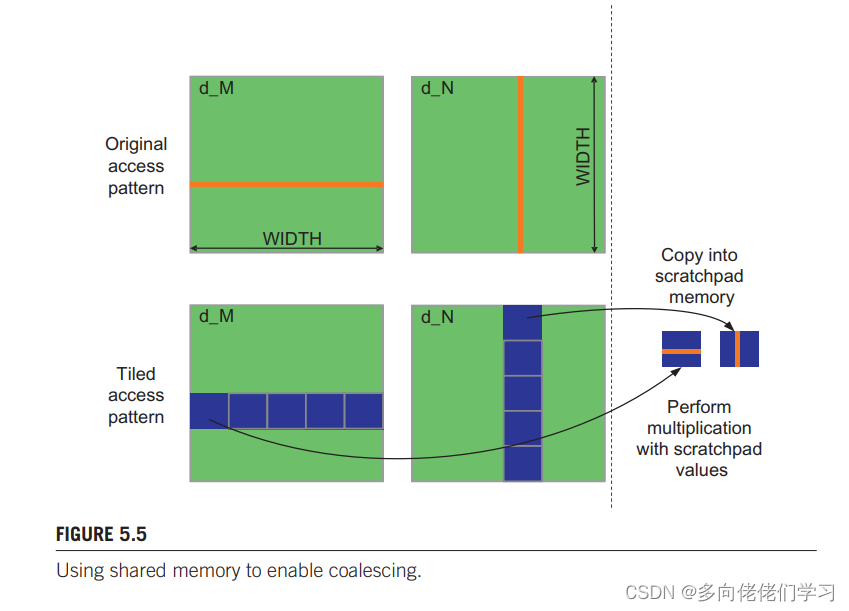
(二)中的简单矩阵乘法正好说明了两种最坏和最好的数组访问模式。
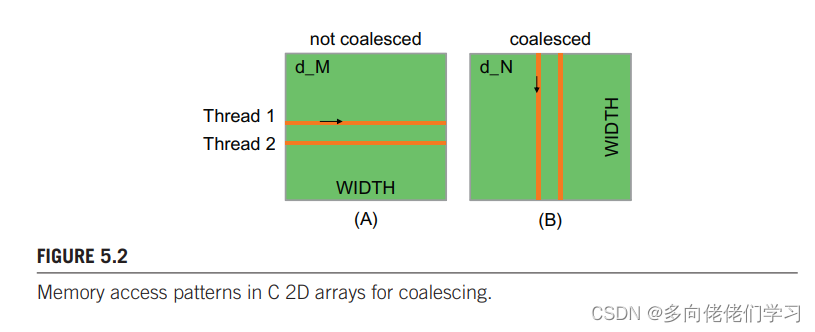
每个线程访问矩阵 d_M 的一行和 d_N 的一列。
以 4x4 矩阵 d_M 与 4x4 的线程块为例,介绍d_M 的访问模式:
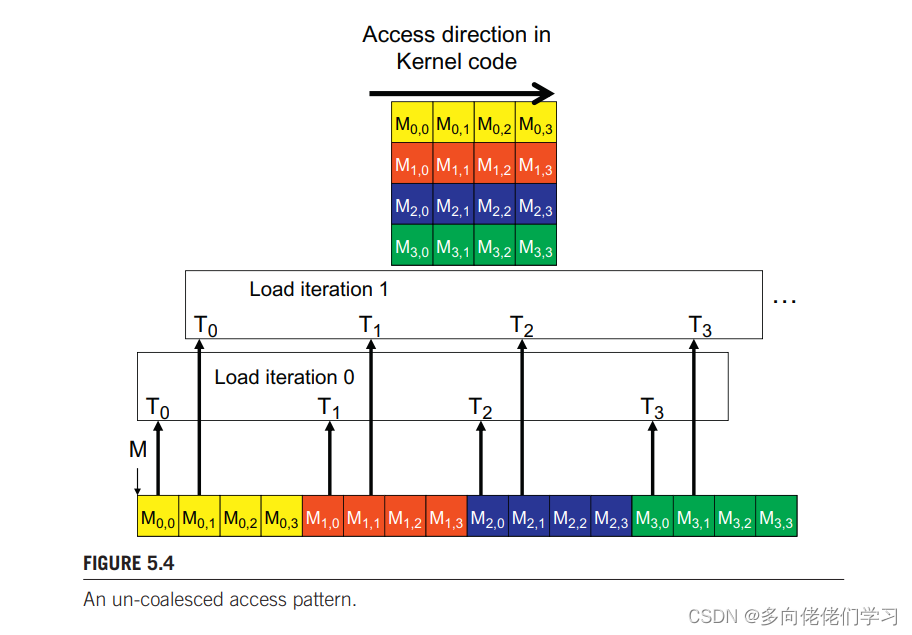
在第 0 次加载迭代中要访问 M0,0,M1,0,M2,0, M3,0 ,在第 1 次加载迭代中要访问 M0,1,M1,1,M2,1, M3,1 ,以此类推,每次加载迭代访问的四个数在内存中不是连续存放的,硬件就不能将这些访问加载成合并访问。
以 4x4 矩阵 d_N 与 4x4 的线程块为例,介绍d_ 的访问模式:
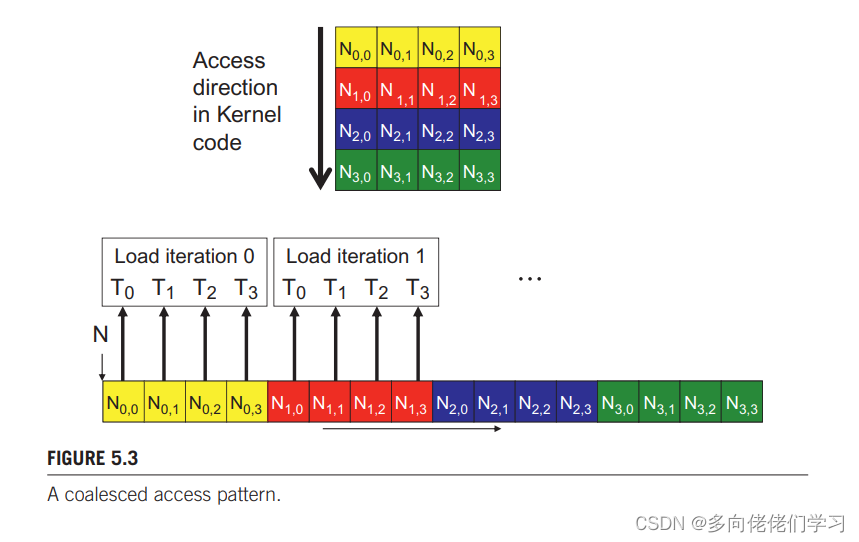
在第 k 次加载迭代中要访问 Mk,0,Mk,0,Mk,0, Mk,0 ,每次加载迭代访问的四个数在内存中是连续存放的,硬件就能将这些访问加载成合并访问。
所以,kernel 函数遍历一行的效率要远低于遍历一列的效率。
对于算法要求的必须按行读取矩阵元素时,可以使用共享存储器实现存储的合并访问。例如使用分块矩阵乘法:
__global__ void MatrixMulKernel(float *d_M, float *d_N, float *d_P, int m, int k, int n){
__shared__ float Mds[TILE_WIDTH][TILE_WIDTH];
__shared__ float Nds[TILE_WIDTH][TILE_WIDTH];
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;
int row = by * blockDim.y + ty;
int col = bx * blockDim.x + tx;
float Pvalue = 0; //in every thread
for(int ph = 0; ph < ceil(k/float(TILE_WIDTH));++ph){
if(row < m && (ph * TILE_WIDTH + tx) < k)
Mds[ty][tx] = d_M[row * k + ph * TILE_WIDTH + tx];
else Mds[ty][tx] = 0.0;
if(col < n && (ph * TILE_WIDTH + ty) < k)
Nds[ty][tx] = d_N[(ph * TILE_WIDTH + ty) * n + col];
else Nds[ty][tx] = 0.0;
__syncthreads();
for(int i = 0;i < TILE_WIDTH;++i){
Pvalue += Mds[ty][i] * Nds[i][tx];
}
__syncthreads();
}
if (row < m && col < n)//将计算后的矩阵块放到结果矩阵d_P中
d_P[row*n + col] = Pvalue;
}
14行按照索引公式d_M[row * k + ph * TILE_WIDTH + tx],17行按照索引公式d_N[(ph * TILE_WIDTH + ty) * n + col] 从全局存储器中读取内容到块中。如果将 TILE_WIDTH 设置成与 warp 的大小相同的话, d_M 与 d_N 每个块中行的访问都可以通过 一个warp 完成。因为块内同一行的元素在在存储器中是连续存放的,所以同一个 warp 中的线程访问将被结合成一个合并的访问。
将块加载到共享存储器后,再对 d_M 的一块按行读取,对 d_N 的一块按行读取,因为共享存储器是高速的片上存储器,按行按列访问对访问速度没有影响。
3.执行资源的动态划分
SM 中的执行资源包括寄存器、共享存储器 、线程块槽和线程槽,这些资源冬天分配给线程。
例如一个 SM 有 8 个块槽,1536 个线程槽,如果每个线程块有 512 个线程,那么一个 SM 分配 3 个线程块,如果一个线程块有 128 个线程,那么一个 SM 分配 8 个块槽,共有1024个线程,这就是对线程槽的不充分利用。
另一个例子,我们知道 kernel 自动变量保存在寄存器中,在矩阵乘法中,假定每个 SM 包含 16384 个寄存器,每个线程用 10 个寄存器,每个块 16x16 个线程。则每个块中需要 2560个寄存器,6 个块需要用到 15360 个寄存器,7个块要用到 17920 个寄存器,超出限制,所以寄存器限制了每个线程块共有 6 个块,共有 1536 个线程在每个 SM 上运行。
假设在 kernel 中又声明了两个变量,现在每个块需要 12x16x16 = 3072 个寄存器。6个块需要 18432 个寄存器,只能在 SM 中减少一个块,那么一个 SM 就只有1280 个线程。多使用了两个寄存器,warp 的性能降低了 1/6。
所以在编写 kernel 函数时,要先了解硬件信息,以设计高效的 kernel 函数。