1.性能优化里面的两个归约 kernel 函数在使用线程时很浪费,每个块中有一半线程根本没执行。修改 kernel 来消除这种浪费现象。给出 kernel 启动时与之相关的配置参数的值。在运算操作方面是否需要更多额外成本?这种修改能消除哪种类型的资源限制?
答:修改后的第一个:
unsigned int t = threadIdx.x * 2;
for(int stride = 1;stride <= blockDim.x;stride <<= 1){
if(t % (2*stride) == 0){
partialSum[t] +=partialSum[t + stride];
}
__syncthreads();
}
修改后的第二个:
__shared__ double partialSum[];
unsigned int t = threadIdx.x;
for (unsigned int stride = blockDim.x; stride > 0; stride >>=1 )
{
__syncthreads();
if (t < stride)
partialSum[t] += partialSum[t+stride];
}
启动配置:
reduction_sum<<<ceil((double)n/THREAD_LENGTH/2), THREAD_LENGTH>>>(d_A, n);
第一个将线程 ID 的二倍赋给 t,同时循环结束条件由 blockDim.x/2 变成了 blockDim.x ,所以多了两个额外操作。
第二个将循环中初始条件:stride乘 2,所以多了一个循环的额外操作。
2.将上一题修改后的kernel函数进行比较,那种修改方案引入的运算操作较少?
第二种比第一种少了线程 ID 的乘法。
3.在习题1的基础上编写一个完整的kernel函数:(1)添加几条语句,实现把输入数组的部分数据从全局存储器加载到共享存储器中;(2)利用变量 blockIdx.x 让多个块作用于数组的不同部分;(3)根据 blockIdx.x 将这每部分的归约值写入到一个位置中。
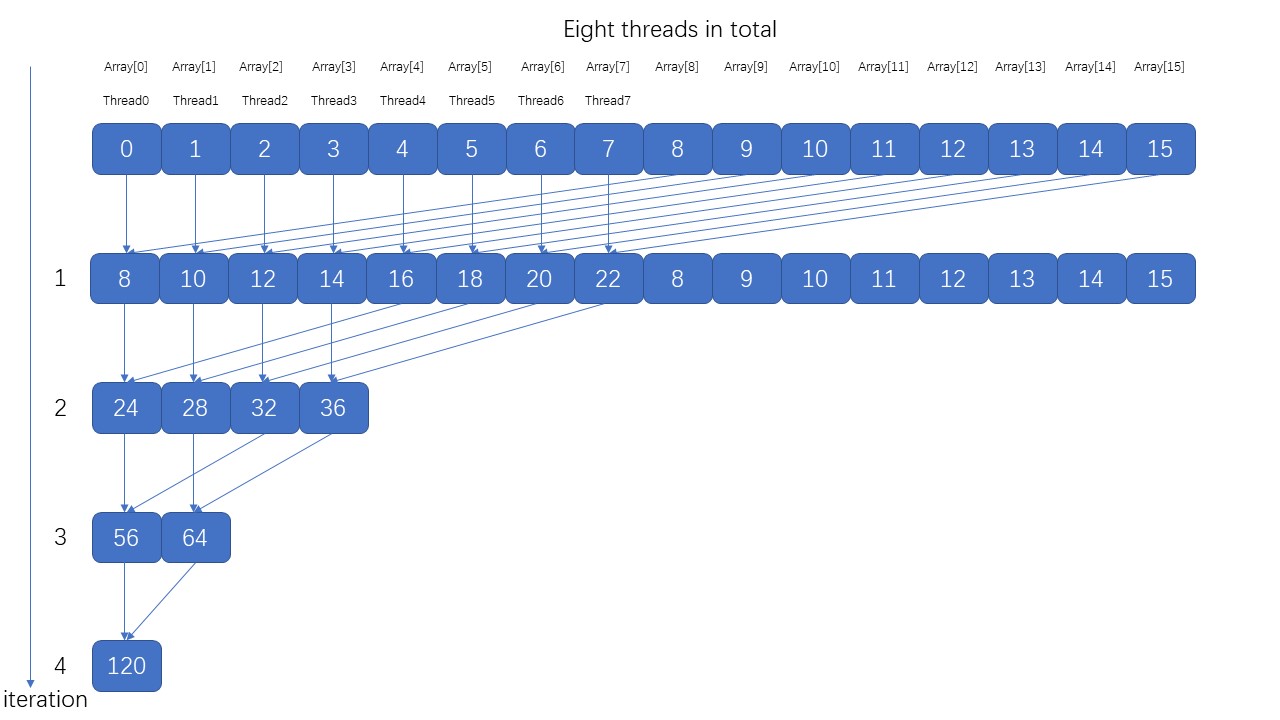
kernel:
__global__ void reduction_sum(double *X, size_t input_size){
__shared__ double partialSum[2 * THREAD_LENGTH];
int i = 2 * blockIdx.x * blockDim.x + threadIdx.x;
if(i < input_size) partialSum[threadIdx.x] = X[i];
else partialSum[threadIdx.x] = 0.0;
if(i + blockDim.x < input_size) partialSum[threadIdx.x + blockDim.x] = X[i + blockDim.x];
else partialSum[threadIdx.x + blockDim.x] = 0.0;
__syncthreads();
unsigned int t = threadIdx.x;
for(int stride = blockDim.x; stride >= 1; stride /= 2){
if(t < stride)
partialSum[t] += partialSum[t + stride];
__syncthreads();
}
// unsigned int t = threadIdx.x * 2;
// for(int stride = 1;stride <= blockDim.x;stride <<= 1){
// if(t % (2*stride) == 0){
// partialSum[t] +=partialSum[t + stride];
// }
// __syncthreads();
// }
if(t == 0){
X[blockIdx.x] = partialSum[t];
}
}
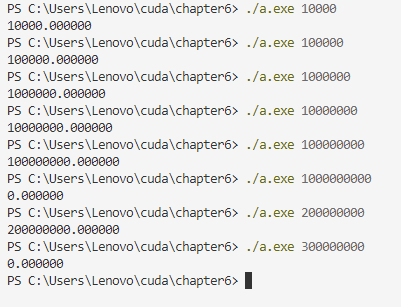
4.以3中的客人了为基础设计一个归约程序。主机代码包括:(1)将大输入数组传入全局存储器中;(2)利用反复循环调用习题3中编写的kernel函数并调整配置参数的值,以便产生整个输入数组的归约结果。
#include<cuda.h>
#include<stdlib.h>
#include<stdio.h>
#define THREAD_LENGTH 1024
//the same as before
__global__ void reduction_sum(double *X, size_t input_size){
__shared__ double partialSum[2 * THREAD_LENGTH];
int i = 2 * blockIdx.x * blockDim.x + threadIdx.x;
if(i < input_size) partialSum[threadIdx.x] = X[i];
else partialSum[threadIdx.x] = 0.0;
if(i + blockDim.x < input_size) partialSum[threadIdx.x + blockDim.x] = X[i + blockDim.x];
else partialSum[threadIdx.x + blockDim.x] = 0.0;
__syncthreads();
//without console stream
unsigned int t = threadIdx.x;
for(int stride = blockDim.x; stride >= 1; stride /= 2){
if(t < stride)
partialSum[t] += partialSum[t + stride];
__syncthreads();
}
//with console stream
// unsigned int t = threadIdx.x * 2;
// for(int stride = 1;stride <= blockDim.x;stride <<= 1){
// if(t % (2*stride) == 0){
// partialSum[t] +=partialSum[t + stride];
// }
// __syncthreads();
// }
if(t == 0){
X[blockIdx.x] = partialSum[t];
}
}
//host code
double reduceArray(double* array, unsigned int length){
double *d_A;
int size = length*sizeof(double);
cudaMalloc(&d_A, size);
cudaMemcpy(d_A, array, size, cudaMemcpyHostToDevice);
int num_blocks = (length - 1)/THREAD_LENGTH/2 + 1;
while(num_blocks >= 1){
reduction_sum<<<num_blocks, THREAD_LENGTH>>>(d_A, length);
if(num_blocks == 1)
break;
length = num_blocks;
num_blocks = (num_blocks - 1)/THREAD_LENGTH/2 + 1;
}
double result(0);
cudaMemcpy(&result, d_A, sizeof(double), cudaMemcpyDeviceToHost);
cudaFree(d_A);
return result;
}
//test
int main(int argc, char **argv){
int n = atoi(argv[1]);
double *A = (double *)malloc(n * sizeof(double));
for(int i = 0; i < n;++i){
A[i] = 1.0;
}
double result = reduceArray(A, n);
printf("%lf\n", result);
free(A);
return 0;
}
运行结果:
5.对于性能优化中的矩阵乘法 kernel 函数,以一个 16 × 16 16\times16 16×16的小型矩阵为例画出同一个 warp 中所有线程在第 9 行和第 10 行中的访问模式。计算同一个 warp 中每个线程的 tx 和 ty 的值,并在第 9 行和第 10行中计算 d_M 和 d_N 的索引值时使用 tx 和 ty 的值。说明在每次迭代过程中线程确实访问全局内存中连续的d_M和d_N位置。
假设线程块大小为 16 × 16 16\times16 16×16,第一个warp就是包含列索引为 0 1 的两行thread。
d_M的索引:
( b l o c k I d x . y × T I L E _ W I D T H + t h r e a d I d x . y ) × W i d t h + m × T I L E _ W I D T H + t h r e a d I d x . x (blockIdx.y \times TILE\_WIDTH + threadIdx.y)\times Width + m \times TILE\_WIDTH + threadIdx.x (blockIdx.y×TILE_WIDTH+threadIdx.y)×Width+m×TILE_WIDTH+threadIdx.x
= ( ( b l o c k I d x . y × W i d t h + m ) × T I L E _ W I D T H ) + t h r e a d I d x . y × W i d t h + t h r e a d I d x . x ((blockIdx.y \times Width + m) \times TILE\_WIDTH) + threadIdx.y \times Width + threadIdx.x ((blockIdx.y×Width+m)×TILE_WIDTH)+threadIdx.y×Width+threadIdx.x
d_N的索引:
( m × T I L E _ W I D T H + t h r e a d I d x . y ) × W i d t h + b l o c k I d x . x × T I L E _ W I D T H + t h r e a d I d x . x (m \times TILE\_WIDTH + threadIdx.y)\times Width + blockIdx.x \times TILE\_WIDTH + threadIdx.x (m×TILE_WIDTH+threadIdx.y)×Width+blockIdx.x×TILE_WIDTH+threadIdx.x
= ( ( m × W i d t h + b l o c k I d x . x ) × T I L E _ W I D T H ) + t h r e a d I d x . y × + t h r e a d I d x . x ((m \times Width +blockIdx.x) \times TILE\_WIDTH) + threadIdx.y \times + threadIdx.x ((m×Width+blockIdx.x)×TILE_WIDTH)+threadIdx.y×+threadIdx.x
括号内的值对于每次循环时单个block内的线程是相同的,所以只证明括号外的值: t h r e a d I d x . y × 16 + t h r e a d I d x . x threadIdx.y \times 16+ threadIdx.x threadIdx.y×16+threadIdx.x产生了相邻的地址即可。
| tx | ty | t h r e a d I d x . y × W i d t h + t h r e a d I d x . x threadIdx.y \times Width + threadIdx.x threadIdx.y×Width+threadIdx.x |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 0 | 2 |
| 3 | 0 | 3 |
| 4 | 0 | 4 |
| 5 | 0 | 5 |
| 6 | 0 | 6 |
| 7 | 0 | 7 |
| 8 | 0 | 8 |
| 9 | 0 | 9 |
| 10 | 0 | 10 |
| 11 | 0 | 11 |
| 12 | 0 | 12 |
| 13 | 0 | 13 |
| 14 | 0 | 14 |
| 15 | 0 | 15 |
| 0 | 1 | 16 |
| 1 | 1 | 17 |
| 2 | 1 | 18 |
| 3 | 1 | 19 |
| 4 | 1 | 20 |
| 5 | 1 | 21 |
| 6 | 1 | 22 |
| 7 | 1 | 23 |
| 8 | 1 | 24 |
| 9 | 1 | 25 |
| 10 | 1 | 26 |
| 11 | 1 | 27 |
| 12 | 1 | 28 |
| 13 | 1 | 29 |
| 14 | 1 | 30 |
| 15 | 1 | 31 |
得证。
但所用线程块较小时,只是同一行访问是连续的,不同行的访问并不能合并。
10.对于下图的设计,编写矩阵乘法 kernel 函数。
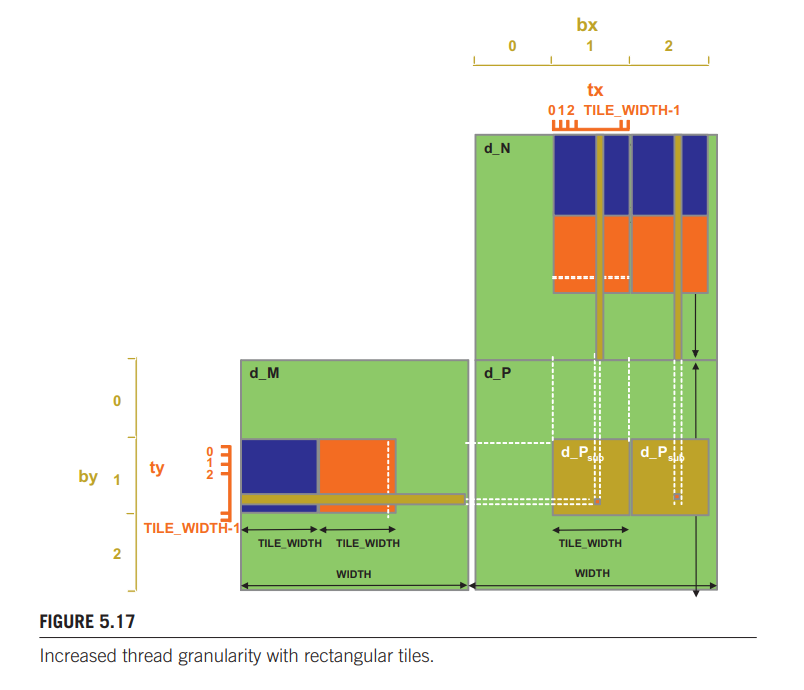
#define BLOCK_SIZE 16
__global__ void
matrixMul(float *Pd, float *Md, float *Nd, int widthM, int widthN)
{
unsigned int bx = blockIdx.x;
unsigned int by = blockIdx.y;
unsigned int tx = threadIdx.x;
unsigned int ty = threadIdx.y;
__shared__ float Ms[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float Ns[BLOCK_SIZE][BLOCK_SIZE * 2];
// M 的第一个子矩阵左上元素索引
int mBegin = widthM * BLOCK_SIZE * by;
// M 的最后一个子矩阵右上元素索引,用来控制循环何时结束
int mEnd = mBegin + widthM - 1;
// M 子矩阵每次循环需要加上的距离
int mStep = BLOCK_SIZE;
// N 的第一个子矩阵左上元素索引
int nBegin = BLOCK_SIZE * bx;
// N 子矩阵每次循环需要加上的距离
int nStep = BLOCK_SIZE * widthN;
//Psub 用来存储结果矩阵每块元素的部分和
float Psub1 = 0.0f;
float Psub2 = 0.0f;
// 遍历所有子矩阵
for (int m = mBegin, n = nBegin; m <= mEnd; m += mStep, n += nStep)
{
// 将数组加载到共享存储器,每个线程加载 3 个元素
Ms[ty][tx] = Md[m + widthM * ty + tx];
Ns[ty][tx] = Nd[n + widthN * ty + tx];
Ns[ty][tx + blockDim.x] = Nd[n + widthN * ty + tx + blockDim.x];
__syncthreads();
// 一次计算两个矩阵
for (int k = 0; k < BLOCK_SIZE; ++k)
{
Psub1 += Ms[ty][k] * Ns[k][tx];
Psub2 += Ms[ty][k] * Ns[k][tx + blockDim.x];
}
__syncthreads();
}
// 写回计算结果,每个线程写一个
int p = widthN * BLOCK_SIZE * by + BLOCK_SIZE * bx;
p += widthN * ty + tx;
Pd[p] = Psub1;
Pd[p + blockDim.x] = Psub2;
}
12.一个年轻的工程师为了提高性能使用如下的kernel进行归约。(A)你认为性能会提升吗?(B)这个工程师应该受奖还是受罚?为啥?
__shared__ float partialSum[];
unsigned int tid = threadIdx.x;
for (unsigned int stride = n >> 1; stride >= 32; stride >>= 1)
{
__syncthreads();
if (tid < stride)
shared[tid] += shared[tid + stride];
}
__syncthreads();
if (tid < 32)
{
// unroll last 5 predicated steps
shared[tid] += shared[tid + 16];
shared[tid] += shared[tid + 8];
shared[tid] += shared[tid + 4];
shared[tid] += shared[tid + 2];
shared[tid] += shared[tid + 1];
}
会提升,会受奖赏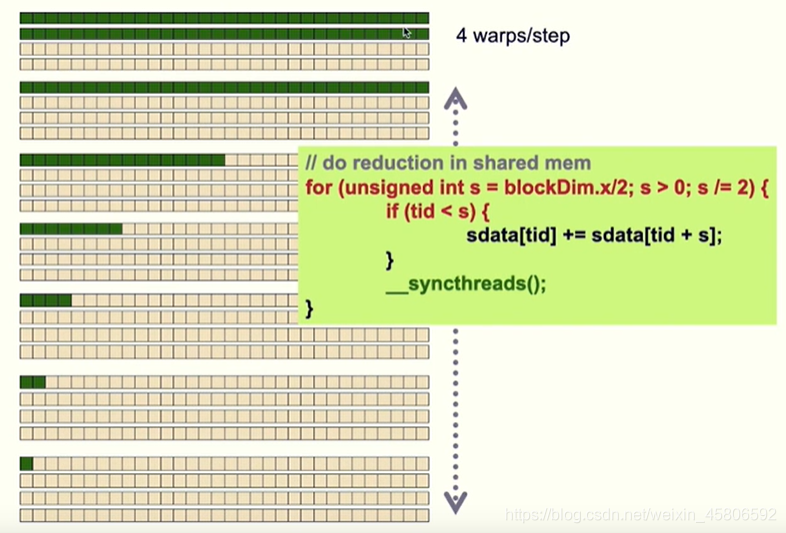
当执行到只有 32 个线程在计算时,每次循环都只有一个warp在使用,其他warp没有使用,会造成资源浪费。将最后一次计算时的warp单独展开,减少了要执行指令的数量,从而可以提高性能。