一、2D图像的仿射变换
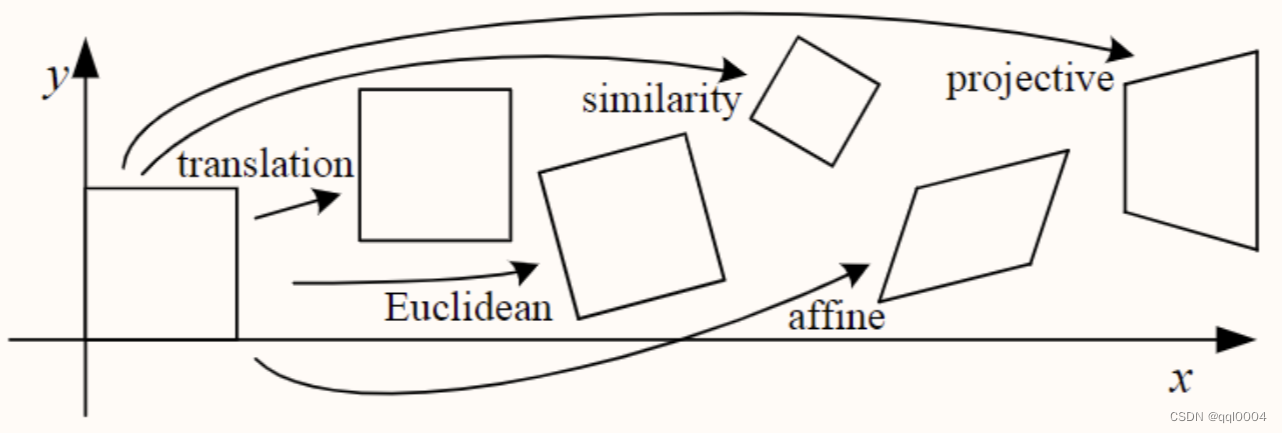
仿射变换包括 平移、旋转、错切、放缩(各向同性和各向异性)
欧式变换(刚体变换)包括 平移和旋转
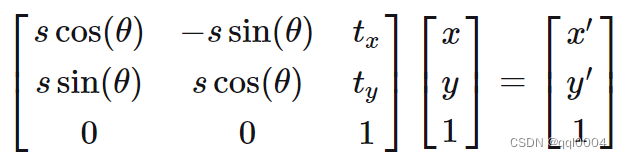
相似变换包括平移、旋转、放缩(各向同性)
相似变换矩阵有4个自由度 s,θ,tx,ty:
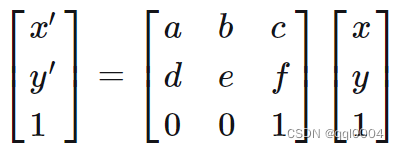
仿射变换矩阵有6个自由度:
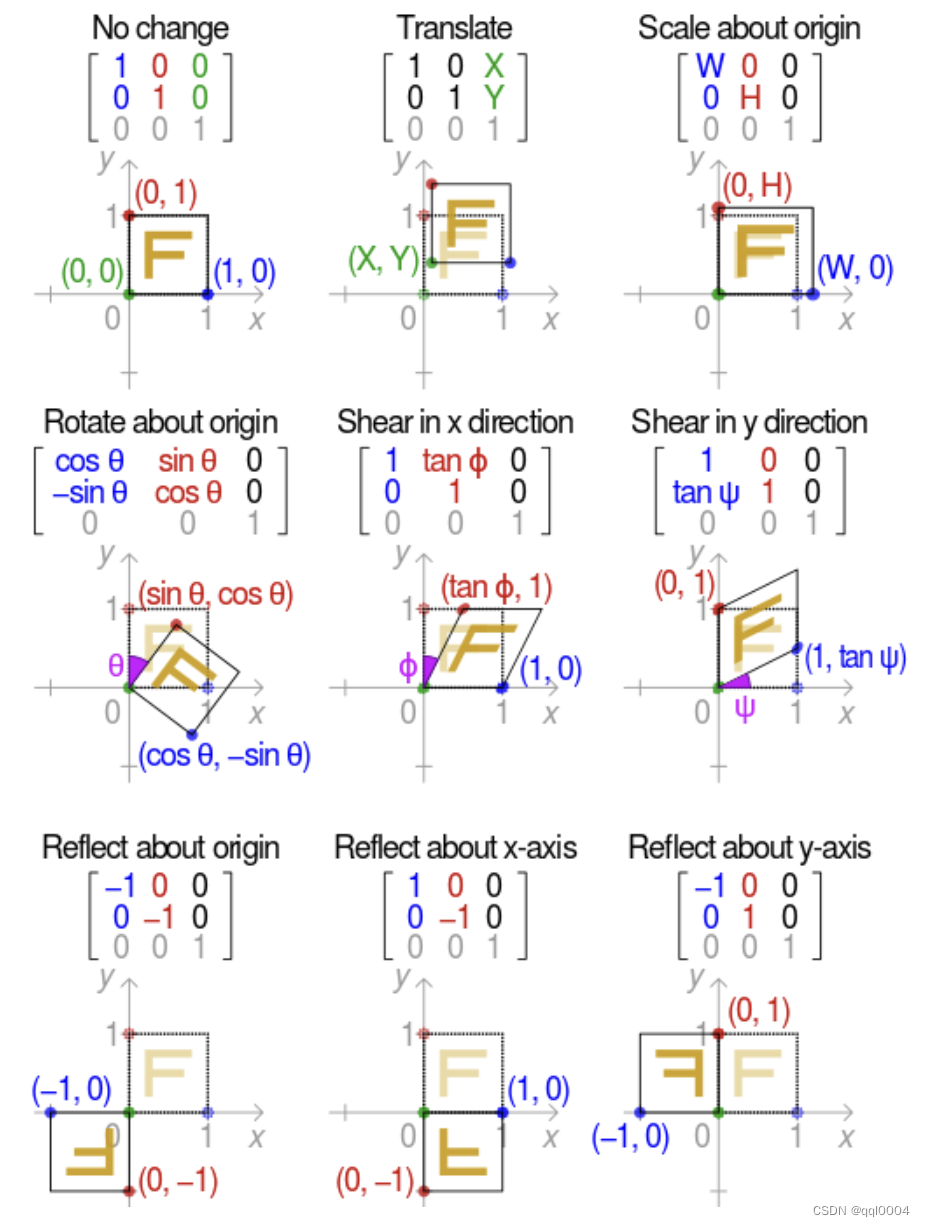
- 所有变换矩阵只需关注一点:坐标系的变化,即基向量和原点的变化;
- 坐标系变化到哪里,坐标系中的所有点也跟着做同样的变化;
参考:
https://www.cnblogs.com/shine-lee/p/10950963.html
二、3D图像的仿射变换
2d变换矩阵推广到3d,其他变换矩阵推广较为简单,只介绍旋转变换矩阵和错切变换矩阵
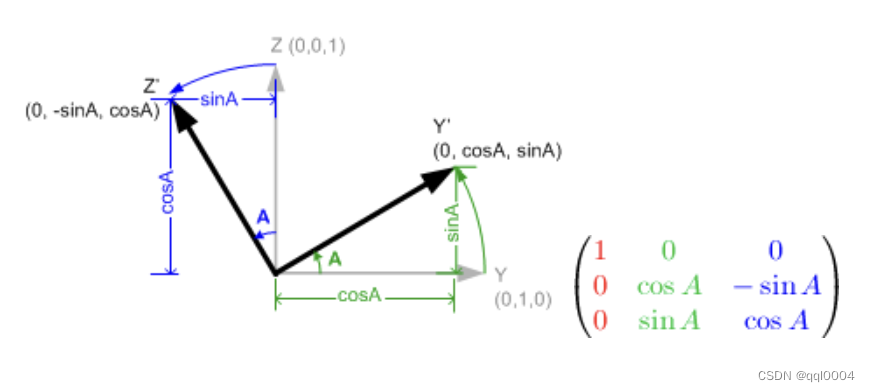
绕x轴旋转:
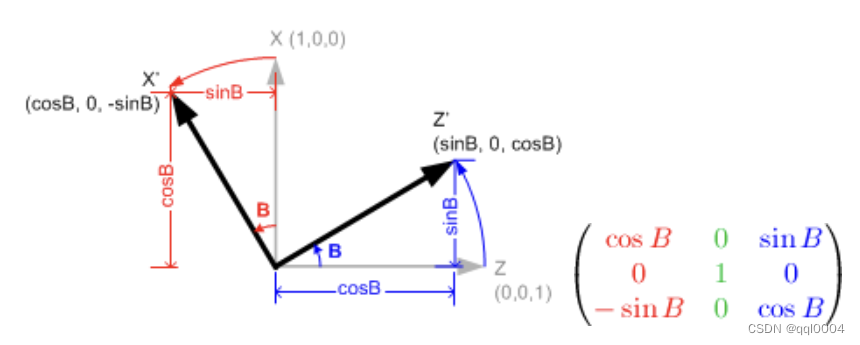
绕y轴旋转:
绕z轴旋转:

错切变换矩阵:
参考: