问题简述
在3D模式下如何模拟实现Unity摄像机对象锁定旋转运镜,可以分为两个部分,第一是实现对象锁定,第二是实现旋转运镜。对象锁定就是无论摄像机如何运动,始终保持对象位于摄像机成像区域的固定位置,旋转运镜就是使得摄像机围绕对象进行旋转运动。
解决思路
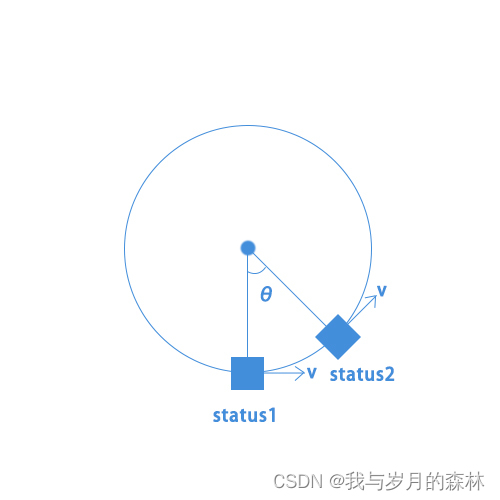
从图1我们可以把摄像机的运动定格到两个状态,status2可以看作status1一帧后摄像机的运动位置和状态,摄像机始终存在一个速度v并且要求这个速度始终沿着圆的切线方向,这样我们才能实现摄像机的旋转运镜,实际上我们只是给摄像机一个status1所示方向上的速度,之所以出现图1中status2的情景,是因为我们对摄像机进行了旋转,否则摄像机就会始终按照图2所示的方式运动。


图3所示是模拟了摄像机的坐标系,这个正方体就代表摄像机,图中的坐标系是摄像机的Local坐标系,z轴指向的是摄影区域的中点,我们结合图1和图3,假设给摄像机施加了一个x轴方向的速度v,那么我们就需要以y轴为轴线对摄像机进行旋转,使得z轴始终指向我们要锁定的游戏对象。
对于对象锁定,我们知道摄像机有一个摄像区域,位于这个区域内的物体才会显示到成像区域中,在Unity中这个区域可以是一个长方体也可以是一个四棱锥,我们将之投影到摄像机Local坐标系的x和y轴构成的二维平面上,在默认参数下则二者的成像区域都是一个长方形A(如图4),蓝色的圆就代表锁定的游戏对象。

对于摄像机的Local坐标系,无论我们怎么旋转摄像机,z轴都始终指向长方形A的中点,所以说到这里我想你应该想到了对象锁定的实现思路了,假设我们就让对象锁定在成像区域(即长方形A)的中点,那么我们就需要让摄像机进行旋转使得摄像机的Local坐标系的z轴指向我们要锁定的游戏对象。
对于旋转运镜,具体我们要让摄像机旋转多少角度,这里进行了一个近似处理,因为我们是每一帧进行一次更新,图2展示的是在没有进行旋转的情况下摄像机的运动,此时status2是status1的下一帧摄像机的位置和状态,在一帧的情况下图2中的status2和status1非常接近,就好比“微分思想”一样,如此我们可以将图2转换为一个直角三角形。假设锁定的游戏对象的世界坐标为(x1,y1,z1),status1时摄像机的世界坐标为(x2,y2,z2),status2时摄像机的世界坐标为(x3,y3,z3),就有以下结论:

如果摄像机是按照图1所示逆时针运动,那么摄像机从status1到status2针对Local坐标系所需要旋转的角度就是-θ,我们已知cosθ的值,就可以计算出θ。
代码示例(C#)
using UnityEngine;
public class CameraLookAt : MonoBehaviour
{
[Header("必要组件")]
[Tooltip("相机注视对象")]
public Transform lookAtObject;
[Header("必要属性")]
[Tooltip("相机移动速度")]
[Range(1, 10)]
[SerializeField] private float moveSpeed;
float d1;
float d2;
Vector3 lookAtPos;
Vector3 mPos;
float mAngle;
void Start()
{
lookAtPos = lookAtObject.position;
mPos = transform.position;
}
void FixedUpdate()
{
Move();
AngleUpdate();
Rotation();
}
//摄像机移动
void Move()
{
transform.Translate(moveSpeed * Time.fixedDeltaTime, 0, 0);
}
//角度更新
void AngleUpdate()
{
d1 = Mathf.Pow(mPos.x - lookAtPos.x, 2) + Mathf.Pow(mPos.y - lookAtPos.y, 2) + Mathf.Pow(mPos.z - lookAtPos.z, 2);
mPos = transform.position;
d2 = Mathf.Pow(mPos.x - lookAtPos.x, 2) + Mathf.Pow(mPos.y - lookAtPos.y, 2) + Mathf.Pow(mPos.z - lookAtPos.z, 2);
mAngle += Mathf.Acos(Mathf.Sqrt(d1 / d2)) * 180 / Mathf.PI;
}
//摄像机旋转
void Rotation()
{
transform.localRotation = Quaternion.Euler(0, -mAngle, 0);
}
}
代码解说
我们发现要实现Unity摄像机对象锁定旋转运镜模拟的代码很简单,主要就是摄像机的移动Move、角度更新AngleUpdate、摄像机的旋转Rotation,针对我这里为什么没有把三个方法的调用放在Update中而是放在了FixedUpdate中,起初我确实是放在Update中执行的,但是出现了Unity编辑器出现了错误提示,我们这里涉及到cosθ的计算,但是经过我的检测发现期间cosθ的值居然出现了大于1的情况,这显然是不正确的,Update是按照固定的帧率执行的,这并不符合我们运行的物理设备的实际帧率,所以就需要执行FixedUpdate对我们的执行频率进行修正。
效果演示
Unity摄像机对象锁定旋转运镜模拟
如果这篇文章对你有帮助,请给作者点个赞吧!