目录
1.算法仿真效果
matlab2022a仿真结果如下:



2.算法涉及理论知识概要
随着智能交通系统的发展,驾驶员驾驶意图的识别越来越受到人们的关注。准确识别驾驶员的驾驶意图对于提高道路安全和实现自动驾驶技术具有重要意义。提出了一种基于隐马尔科夫模型(HMM)的驾驶员驾驶意图识别方法,通过对驾驶员的行为数据进行建模和分析,实现对驾驶员驾驶意图的实时识别。HMM是一种统计模型,可以用于处理具有时序结构的数据。在许多领域,如语音识别、手写识别等,HMM已经取得了显著的研究成果。本文提出了一种基于HMM的驾驶员驾驶意图识别方法,通过对驾驶员的行为数据进行建模和分析,实现对驾驶员驾驶意图的实时识别。
根据驾驶员行车过程,在路面上主要有急加速,加速,匀速保持,减速,急减速几类驾驶状态,上述五种驾驶状态分别简写为,HD,D,N,P,HP,在设定的时间节点之间,五种驾驶状态即能够反映驾驶员目前驾驶意图。每种每一类驾驶状态分别有相应的驾驶动作,主要体现在加速踏板开度,刹车踏板开度,及其变化率上。假设在行驶路面上五种驾驶意图类型分别为(n=1,2,3,4,5),在连续的时间节点内,驾驶意图状态会概率性转移或者保持不变。驾驶观测值类型为(m=1,2,3),,与的映射关系以概率值表征。驾驶意图与观测值以节点网络关联模式的模型如图1,图中a,b表示发生概率,表示驾驶员驾驶意图。
隐马尔可夫模型(Hidden Markov Model,HMM)是马尔可夫链的一种,它的状态不能直接观察到,但能通过观测向量序列观察到,每个观测向量都是通过某些概率密度分布表现为各种状态,每一个观测向量是由一个具有相应概率密度分布的状态序列产生。隐马尔可夫模型是统计模型,它用来描述一个含有隐含未知参数的马尔可夫过程。其难点是从可观察的参数中确定该过程的隐含参数。然后利用这些参数来作进一步的分析,例如模式识别。所以,隐马尔可夫模型是一个双重随机过程具有一定状态数的隐马尔可夫链和显示随机函数集。到了90年代,HMM在模式识别、故障诊断等领域也开始得到应用。
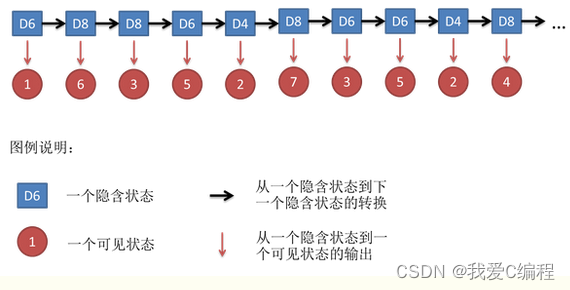
隐马尔科夫模型(HMM)是一种统计模型,它用来描述一个隐藏的马尔科夫过程产生的可观测数据序列。HMM由两个随机过程组成,一个是隐藏的马尔科夫过程,另一个是观测过程。隐藏的马尔科夫过程是一个离散时间马尔科夫链,其状态之间的转换满足马尔科夫性质。观测过程是在给定隐藏状态下产生观测数据的条件概率分布。
驾驶意图识别:给定一个新的观测序列,使用Viterbi算法计算最有可能的隐藏状态序列,从而识别驾驶意图。具体来说,根据已训练的HMM模型,计算观测序列在各个隐藏状态下的概率,选择概率最大的隐藏状态作为驾驶意图。
驾驶意图预测:为了实现实时驾驶意图预测,本文采用滑动窗口方法。将新的观测数据加入到窗口中,并将窗口中最早的观测数据移除。实现对驾驶员驾驶意图的实时预测。
3.MATLAB核心程序
function [LL1,prior1,transmat1,mu1,Sigma1,mixmat1,LL2,prior2,transmat2,mu2,Sigma2,mixmat2,LL3,prior3,transmat3,mu3,Sigma3,mixmat3,LL4,prior4,transmat4,mu4,Sigma4,mixmat4,LL5,prior5,transmat5,mu5,Sigma5,mixmat5]=func_HMM_Train(Dat1,Dat2,Dat3,Dat4,Dat5,Dat1s,Dat2s,Dat3s,Dat4s,Dat5s);
M = 2;
Q = 3;
O = 1;
T = 3;
nex = length(Dat1);
prior0 = normalise(rand(Q,1));
transmat0 = mk_stochastic(rand(Q,Q));
Sigma0 = repmat(eye(O), [1 1 Q M]);
indices = randperm(T*nex);
mu0 = reshape(Dat1s(:,indices(1:(Q*M))), [O Q M]);
mixmat0 = mk_stochastic(rand(Q,M));
[LL1, prior1, transmat1, mu1, Sigma1, mixmat1] = mhmm_em(Dat1s, prior0, transmat0, mu0, Sigma0, mixmat0, 'max_iter', 1000);
nex = length(Dat2);
prior0 = normalise(rand(Q,1));
transmat0 = mk_stochastic(rand(Q,Q));
Sigma0 = repmat(eye(O), [1 1 Q M]);
indices = randperm(T*nex);
mu0 = reshape(Dat2s(:,indices(1:(Q*M))), [O Q M]);
mixmat0 = mk_stochastic(rand(Q,M));
[LL2, prior2, transmat2, mu2, Sigma2, mixmat2] = mhmm_em(Dat2s, prior0, transmat0, mu0, Sigma0, mixmat0, 'max_iter', 1000);
nex = length(Dat3);
prior0 = normalise(rand(Q,1));
transmat0 = mk_stochastic(rand(Q,Q));
Sigma0 = repmat(eye(O), [1 1 Q M]);
indices = randperm(T*nex);
mu0 = reshape(Dat3s(:,indices(1:(Q*M))), [O Q M]);
mixmat0 = mk_stochastic(rand(Q,M));
[LL3, prior3, transmat3, mu3, Sigma3, mixmat3] = mhmm_em(Dat3s, prior0, transmat0, mu0, Sigma0, mixmat0, 'max_iter', 1000);
nex = length(Dat4);
prior0 = normalise(rand(Q,1));
transmat0 = mk_stochastic(rand(Q,Q));
Sigma0 = repmat(eye(O), [1 1 Q M]);
indices = randperm(T*nex);
mu0 = reshape(Dat4s(:,indices(1:(Q*M))), [O Q M]);
mixmat0 = mk_stochastic(rand(Q,M));
[LL4, prior4, transmat4, mu4, Sigma4, mixmat4] = mhmm_em(Dat4s, prior0, transmat0, mu0, Sigma0, mixmat0, 'max_iter', 1000);
nex = length(Dat5);
prior0 = normalise(rand(Q,1));
transmat0 = mk_stochastic(rand(Q,Q));
Sigma0 = repmat(eye(O), [1 1 Q M]);
indices = randperm(T*nex);
mu0 = reshape(Dat5s(:,indices(1:(Q*M))), [O Q M]);
mixmat0 = mk_stochastic(rand(Q,M));
[LL5, prior5, transmat5, mu5, Sigma5, mixmat5] = mhmm_em(Dat5s, prior0, transmat0, mu0, Sigma0, mixmat0, 'max_iter', 1000);
08_056_m4.完整算法代码文件
V