ISSUE : Linux/XnLinuxUSB.cpp:40:21: fatal error: libudev.h: No such file or directory
Solution : sudo apt-get install libudev-dev
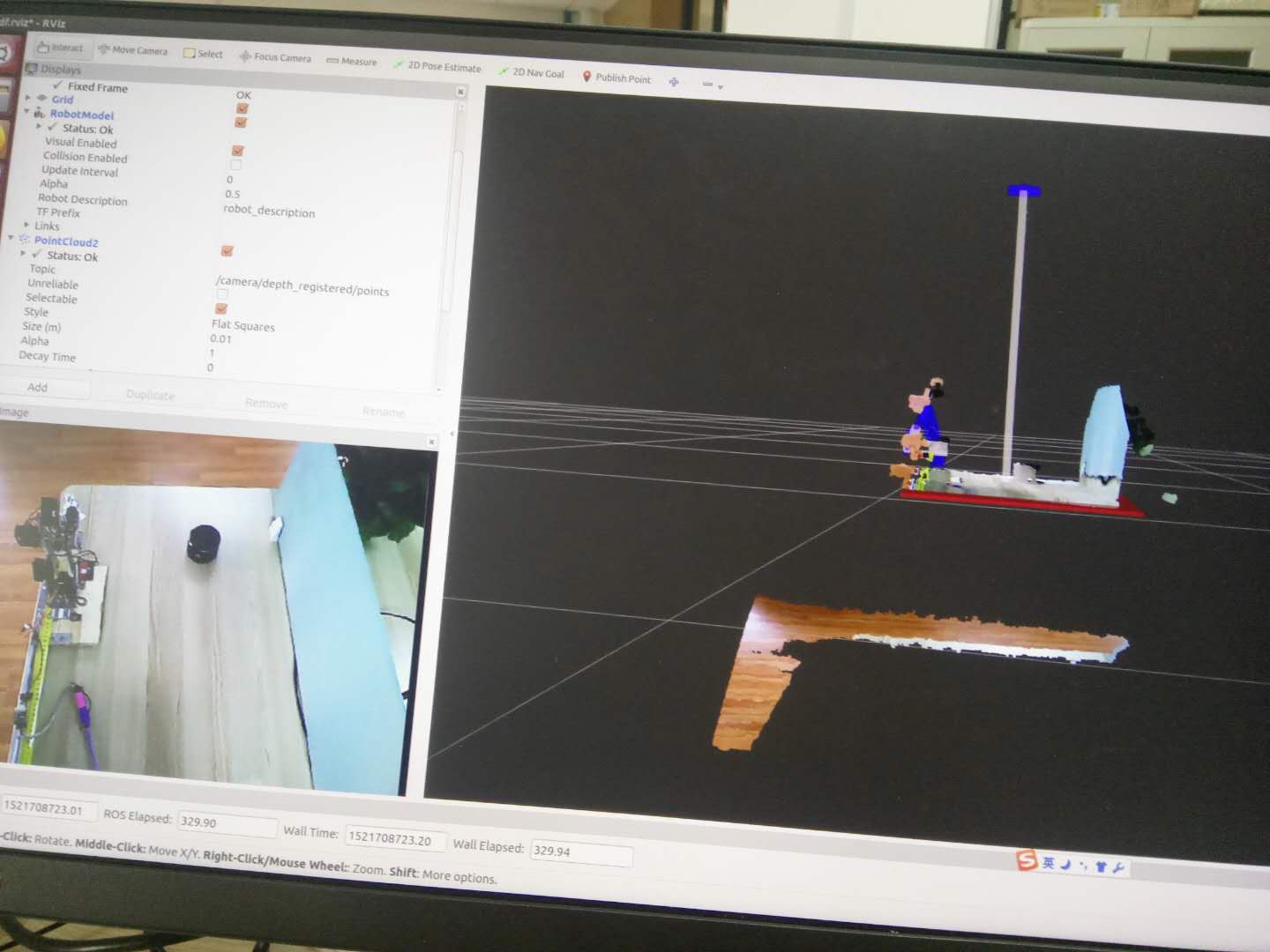
astra.launch 文件中已经指定好 camera_depth_frame camera_depth_optical_frame ,所以在urdf中发布深度信息的joint name也要设置成一样的。
参考:
How to add Kinect sensor input to a URDF model?
https://answers.ros.org/question/9138/how-to-add-kinect-sensor-input-to-a-urdf-model/
I'm able to run the Kinect demo as shown here:
http://www.ros.org/wiki/kinect/Tutori...
and also separately can visualize my URDF model. The question now arises as to how to combine the two, such that the model and sensor data appear together. I have a node within the model for the camera location, so presumably the kinect topic needs to be linked to this somehow.
1 Answer

In your model for the kinect you need to create a fixed joint between the link that represents your model and the frame_id being published by the kinect node.
for example:
<link name="kinect_link">
<visual>
<geometry>
<box size="0.064 0.121 0.0381" />
</geometry>
<material name="Blue" />
</visual>
<inertial>
<mass value="0.0001" />
<origin xyz="0 0 0" />
<inertia ixx="0.0001" ixy="0.0" ixz="0.0"
iyy="0.0001" iyz="0.0"
izz="0.0001" />
</inertial>
</link>
<joint name="kinect_depth_joint" type="fixed">
<origin xyz="0 0.028 0" rpy="0 0 0" />
<parent link="kinect_link" />
<child link="kinect_depth_frame" />
</joint>
<link name="kinect_depth_frame">
<inertial>
<mass value="0.0001" />
<origin xyz="0 0 0" />
<inertia ixx="0.0001" ixy="0.0" ixz="0.0"
iyy="0.0001" iyz="0.0"
izz="0.0001" />
</inertial>
</link>
<joint name="depth_optical_joint" type="fixed">
<origin xyz="0 0 0" rpy="${-M_PI/2} 0 ${-M_PI/2}" />
<parent link="kinect_depth_frame" />
<child link="kinect_depth_optical_frame" />
</joint>
<link name="kinect_depth_optical_frame">
<inertial>
<mass value="0.0001" />
<origin xyz="0 0 0" />
<inertia ixx="0.0001" ixy="0.0" ixz="0.0"
iyy="0.0001" iyz="0.0"
izz="0.0001" />
</inertial>
</link>Then based on the above urdf launch the kinect node with the following parameteres:
<node pkg="openni_camera" type="openni_node" name="openni_camera" output="screen" respawn="true" >
<param name="device_type" value="1" />
<param name="registration_type" value="1" />
<param name="point_cloud_resolution" value="1" />
<param name="openni_depth_optical_frame" value="kinect_depth_optical_frame" />
<param name="openni_rgb_optical_frame" value="kinect_rgb_optical_frame" />
<param name="image_input_format" value="5" />
<rosparam command="load" file="$(find openni_camera)/info/openni_params.yaml" />
</node>Comments
by doing this, will I be able to move my robot model with the tf data coming from the kinect?