论文地址:https://arxiv.org/abs/2105.11111
翻译:https://blog.csdn.net/songyuc/article/details/128227048
一、概述
航空目标的特点:
(1)非正轴对齐且具有任意方向
(2)背景噪声杂乱
论文提出的核心点:
(1)提出一种高效的自适应点学习的方法,用于更好的捕获任意朝向实例的几何信息。
(2)高效的质量评估和样本分类方法用于自适应点学习,从而能够从邻近目标或背景噪声中捕获非轴对齐的特征。
(3)提出了三种方向转换函数以增强方向准确的分类和定位。
(4)引入了一种空间约束来惩罚离群点,以实现鲁棒的自适应学习。
总结起来就是,获得特征信息,增强信息的准确性,合适的鲁棒性。
数据集:
DOTA、HRSC、UCAS-AOD和DIOR-R
二、相关工作
旋转目标检测:
传统:预测边界框的旋转角度(1)将角度回归转换为角度分类任务(2)将旋转边界框的参数化转化到2D高斯分布中
待解决的问题:角度的方向估计中边界的不连续性
工作内容:从另一个视角引入了一种更加高效的基于自适应点的表示方法。
轴向无关的特征学习:
传统:面向直立或轴向对齐。
(1)对轴向对齐的RoIs进行空间变换,并在旋转边界框监督下学习轴向无关的表征。
(2)设计了一种特征对齐模块,以减轻轴向对齐卷积特征和任意方向目标之间的错位。
(3)提出一种特征选择模块,来聚合从不同大小卷积核、形状和方向中获得的轴向对齐信息,并使用动态filter生成器来进一步回归。
(4)采用凸包表示来学习不规则的形状和排布,通过可学习的特征自适应来避免特征混叠。
工作内容:本文提出的基于点集的方法是对非轴向对齐的航拍目标来提取关键特征。
目标检测的样本分配策略:
传统:选择正样本的IoU阈值,引入了匹配性度量来评估基于角度锚框的空间对齐程度,它使用了对齐敏感损失来加强分类和方向定位的相关性。
待解决的问题:存在潜在的噪声和困难样例
工作内容:本文提出一种有效的质量评估和样本分配方法来选择正样本点。
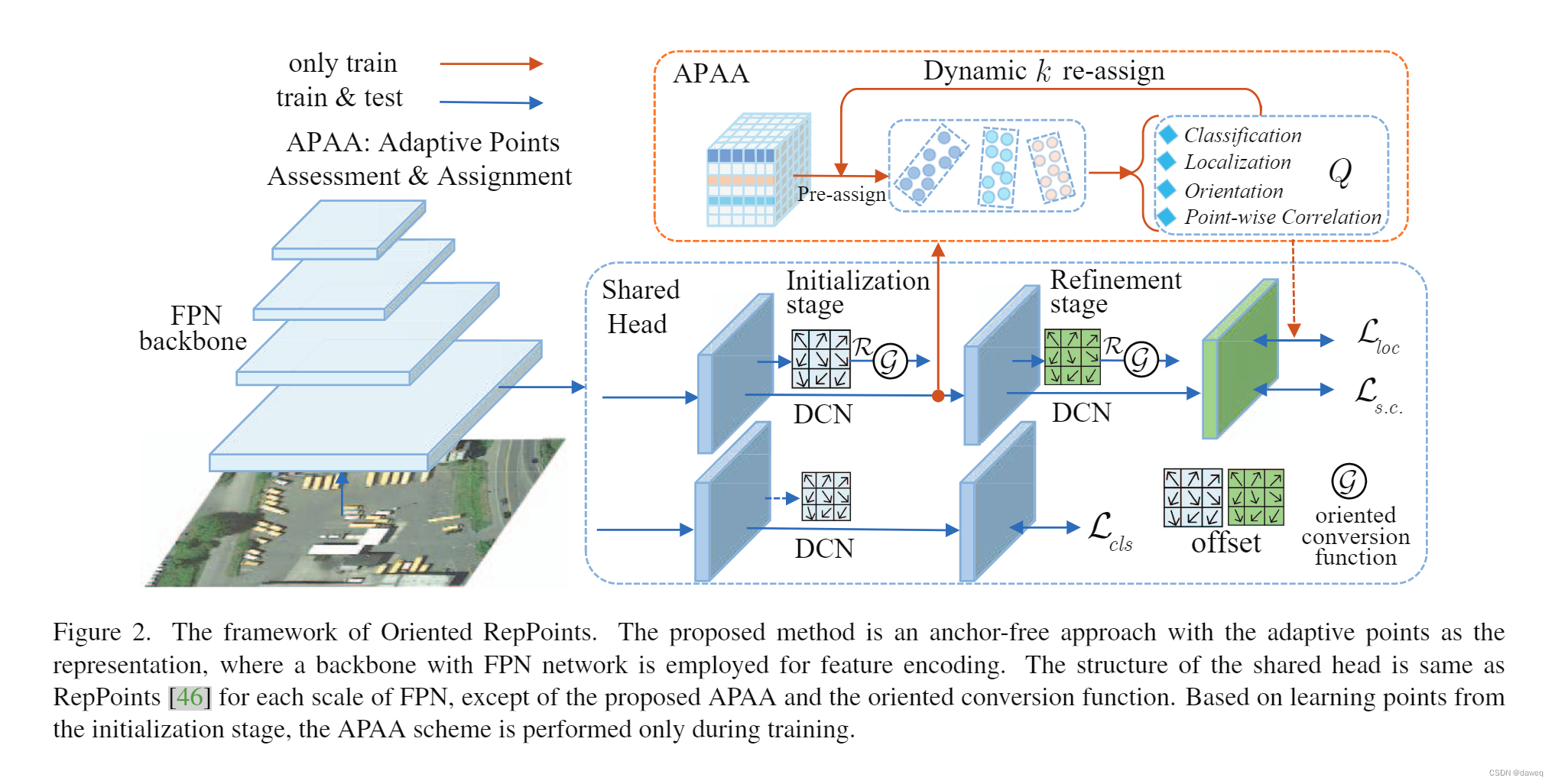
三、Oriented RepPoints
Oriented RepPoints是本文提出的模型,它的基础是DCN(可变形卷积网络)和RepPoints(点集)
RepPointsde的论文地址:https://arxiv.org/abs/1904.11490
(1)引入了可微分的转换函数,有效地学习高质量的自适应点。
(2)提出一种质量度量方法,用来在训练过程中选择高质量的 oriented reppoints。
(3)采用空间约束,促进稳健的自适应表征点学习。
(1)带有角度的自适应表征点学习

G表示为一种角度转换函数,R表示学习表征点集,OP表示到的角度框。
MinAeraRect 目的是从对于旋转目标的学习表征点集中,找到具有最小面积的旋转矩形。
NearestGTCorner 使用真值标注。对于每个角点,会从学习表征点集中选择一个最邻近的点作为预测角点,其中选中角点会被用来构建一个四边形作为旋转边界框。
ConvexHull. 基于 Jarvis March 算法[7_CFA, 11_JarvisMarchAlgorithm],一个旋转实例多边形可以由点集的凸包来定义,该算法也被用于许多基于边缘的方法中。
本文在后处理中使用 MinAeraRect 来获得标准的旋转矩形预测,其它两种函数则用于在训练中优化自适应表征点的学习。这是因为前者是不可微分的。
本文提出的框架由两个阶段组成。初始阶段通过由目标中心点(特征图箱,feature map bins)提取生成自适应表征点集。细化阶段进一步通过最小化损失函数来获得更加精细的调整。公式在原文中表示的很明显了,这里就不展示了。
(2)自适应点评估和分配
对于航拍图像中密集分布和任意朝向的目标,由于缺乏直接监督,学习高质量的点对于自适应地捕获几何特征是十分重要的。为此,本文提出一种评估和分配方法来度量学习点的质量,可以在训练阶段将自适应点的代表性样本分配为正样本。也就是说本文提出了一种新的模型去评定高质量点。
四、相关论文
RepPoints: Point Set Representation for Object Detection:https://arxiv.org/abs/1904.11490
Beyond Bounding-Box: Convex-hull Feature Adaptation for Oriented and Densely Packed Object Detection:https://link.csdn.net/?target=https%3A%2F%2Fopenaccess.thecvf.com%2Fcontent%2FCVPR2021%2Fpapers%2FGuo_Beyond_Bounding-Box_Convex-Hull_Feature_Adaptation_for_Oriented_and_Densely_Packed_CVPR_2021_paper.pdf
On the identification of the convex hull of a finite set of points in the plane:https://link.csdn.net/?target=https%3A%2F%2Fwww.sciencedirect.com%2Fscience%2Farticle%2Fabs%2Fpii%2F0020019073900203
Focal Loss for Dense Object Detection:Focal Loss for Dense Object Detection
A Point Set Generation Network for 3D Object Reconstruction from a Single Image:https://arxiv.org/abs/1612.00603