文章目录
【数学】基本代数图论 Basic Algebraic Graph Theory
1. Notations
- G \mathscr{G} G:图
- V \mathscr{V} V:节点的集合
- E \mathscr{E} E:边的集合
- A \mathscr{A} A:邻接矩阵
- L \mathscr{L} L:拉普拉斯矩阵
- N i \mathscr{N}_i Ni:智能体 i i i的邻居节点集合
2. Basic Concepts
2.1 Basic Representation of Graph
- 有向图 dircted graph: G ≜ ( V , E ) \mathscr{G}\triangleq(\mathscr{V,E}) G≜(V,E),其中 V ≜ { 1 , … , p } \mathscr{V}\triangleq{\{1,\dots,p\}} V≜{ 1,…,p}表示节点的集合, E ⊆ ( V × V ) \mathscr{E}\subseteq(\mathscr{V}\times{\mathscr{V}}) E⊆(V×V)表示边的集合。
- 有向图的边 edge: ( i , j ) (i,j) (i,j)表示 j j j可以从 i i i获取信息,但反过来则不行,且有 ( i , j ) ∈ E (i,j)\in\mathscr{E} (i,j)∈E,其中 i i i是父节点 j j j是子节点。
- 无向图的边 edge: ( i , j ) (i,j) (i,j)表示 i i i和 j j j可以交换信息,无向图的边可以视作是一种特殊的有向图的边,比如无向图的边 ( i , j ) (i,j) (i,j)可以视作有向图的边 ( i , j ) (i,j) (i,j)和 ( j , i ) (j,i) (j,i)的组合。
- 有权图 weighted graph:图中的每一条边都具有权重,如果没有特殊说明,基本所有的图都是有权图。
- 图集合的并 union of a collection of graphs:图集合的并是指,图的节点集合的并和图的边集合的并。
- 邻居节点集合 N i \mathscr{N}_i Ni:代表了所有与智能体 i i i具有一条边相连的所有其他智能体构成的集合。
2.2 Basic Relations of Graph
- 有向通路 directed path:是针对有向图而言的,可以用一系列的边来表示 ( i 1 , i 2 ) , ( i 2 , i 3 ) (i_1,i_2),(i_2,i_3) (i1,i2),(i2,i3)
- 无向通路 undirected path:是针对无向图而言的,用类似于有向通路的方式来定义。
- 强连接 strongly connected:是针对有向图而言的, ∀ \forall ∀节点间都 ∃ \exists ∃一条有向通路
- 连接 connected:是针对无向图而言的, ∀ \forall ∀互异节点间都 ∃ \exists ∃一条无向通路
- 完全 complete:是针对有向图而言的, ∀ \forall ∀节点间都 ∃ \exists ∃一条边
- 全连接 fully connected:是针对无向图而言的, ∀ \forall ∀互异节点间都 ∃ \exists ∃一条边
- 有向树 directed tree:是针对于有向图而言的,除了根节点外每个节点都只有一个父节点,而根节点则没有父节点
- 树 tree:是针对于无向图而言的,每一对节点都只由一条无向通路连接。
2.3 Subgraph of Graph
- 子图 subgraph: ( V s , E s ) (\mathscr{V}^s,\mathscr{E}^s) (Vs,Es)是 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)的子图,其中 V s ⊆ V , E s ⊆ E ⋂ ( V s , V s ) \mathscr{V}^s\subseteq\mathscr{V},\mathscr{E}^s\subseteq\mathscr{E}\bigcap(\mathscr{V}^s,\mathscr{V}^s) Vs⊆V,Es⊆E⋂(Vs,Vs)
- 有向生成树 directed spanning tree: ( V s , E s ) (\mathscr{V}^s,\mathscr{E}^s) (Vs,Es)是 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)的子图, s . t . s.t. s.t. ( V s , E s ) (\mathscr{V}^s,\mathscr{E}^s) (Vs,Es)是有向树,并且 V s = V \mathscr{V}^s=\mathscr{V} Vs=V,即子图包含原图的所有节点
- 无向生成树 undirected spanning tree: ( V s , E s ) (\mathscr{V}^s,\mathscr{E}^s) (Vs,Es)是 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)的子图, s . t . s.t. s.t. ( V s , E s ) (\mathscr{V}^s,\mathscr{E}^s) (Vs,Es)是树,并且 V s = V \mathscr{V}^s=\mathscr{V} Vs=V,即子图包含原图的所有节点
- 有向生成树的存在性 existence of directed spanning tree:当有向生成树是图 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)的子图的时候,我们称图 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)具有生成树。判据:图 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)具有生成树 i f f iff iff图 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)至少具有一个节点对其他所有的节点具有有向通路。
- 无向图生成树的存在性 existence of undirected spanning tree:无向图生成树的存在性等同于连接性。
2.4 Adjacency Matrix
- 有向图的邻接矩阵 adjacency matrix of direceted graph:不允许有自边self-edge的图 ( V , E ) (\mathscr{V},\mathscr{E}) (V,E)的邻接矩阵可以表示为 A ≜ [ a i j ] ∈ R p × p \mathscr{A}\triangleq[a_{ij}]\in\mathbb{R}^{p\times{p}} A≜[aij]∈Rp×p,
a i j = { positive weight if ( j , i ) ∈ E 0 if ( j , i ) ∉ E 0 if i = j a_{ij}= \left\{\begin{array}{ll} \begin{aligned} & \textrm{positive weight} & \textrm{if$(j,i)\in\mathscr{E}$} \\ & 0 & \textrm{if$(j,i)\notin\mathscr{E}$} \\ & 0 & \textrm{if$i=j$} \end{aligned} \end{array}\right. aij=⎩ ⎨ ⎧positive weight00if(j,i)∈Eif(j,i)∈/Eifi=j
- 无向图的邻接矩阵 adjacency matrix of undirected graph:无向图的邻接矩阵定义类似,只不过多了一条性质是 a i j = a j i , i ≠ j a_{ij}=a_{ji},i\neq{j} aij=aji,i=j,保证了无向图的邻接矩阵是对称的。
- 节点的入度 in-degree:对节点 i i i来说,其入度是 ∑ j = 1 p a i j \sum_{j=1}^{p}a_{ij} ∑j=1paij
- 节点的出度out-degree:对节点 i i i来说,其出度是 ∑ j = 1 p a j i \sum_{j=1}^{p}a_{ji} ∑j=1paji
- 平衡点 balanced node:对于节点 i i i来说,如果它的入度等于出度,那么它是平衡点。
- 平衡图 balanced graph:对于图来说,如果它的所有结点都是平衡点那么该图则是平衡图。
2.5 Laplacian Matrix
拉普拉斯矩阵 Laplacian Matrix的定义是 L ≜ [ ℓ i j ] ∈ R p × p \mathscr{L}\triangleq[\ell_{ij}]\in\mathbb{R}^{p\times{p}} L≜[ℓij]∈Rp×p
ℓ i i = ∑ j = 1 , i ≠ j p a i j , ℓ i j = − a i j , i ≠ j \ell_{ii}=\sum_{j=1,i\ne{j}}^{p}a_{ij}, \quad \ell_{ij}=-a_{ij},i\ne{j} ℓii=j=1,i=j∑paij,ℓij=−aij,i=j
并且注意到 ( j , i ) ∉ E (j,i)\notin\mathscr{E} (j,i)∈/E则有 ℓ i j = − a i j = 0 \ell_{ij}=-a_{ij}=0 ℓij=−aij=0,那么拉普拉斯矩阵满足:
ℓ i j ≤ 0 , i ≠ j , ∑ j = 1 p ℓ i j = 0 , i = 1 , … , p \ell_{ij}\le0,i\ne{j}, \quad \sum_{j=1}^p\ell_{ij}=0,i=1,\dots,p ℓij≤0,i=j,j=1∑pℓij=0,i=1,…,p
- 无向图的拉普拉斯矩阵是对称阵,直接称为Laplacian matrix
- 有向图的拉普拉斯矩阵是非对称阵,称为nonsymetric Laplacian matrix或者directed Laplacian matrix
入度矩阵in-degree matrix D ≜ [ d i j ] ∈ R p × p D\triangleq[d_{ij}]\in\mathbb{R}^{p\times{p}} D≜[dij]∈Rp×p的定义是:
d i j = { 0 if i ≠ j ∑ j = 1 p a i j i = 1 , … , p d_{ij}= \left\{\begin{array}{ll} \begin{aligned} & 0 & \textrm{if $i\ne{j}$} \\ & \sum_{j=1}^pa_{ij} & i=1,\dots,p \end{aligned} \end{array}\right. dij=⎩
⎨
⎧0j=1∑paijif i=ji=1,…,p
那么拉普拉斯矩阵 L \mathscr{L} L就可以通过入度矩阵 D D D和邻接矩阵 A \mathscr{A} A来进行表示
L = D − A \mathscr{L}=D-\mathscr{A} L=D−A
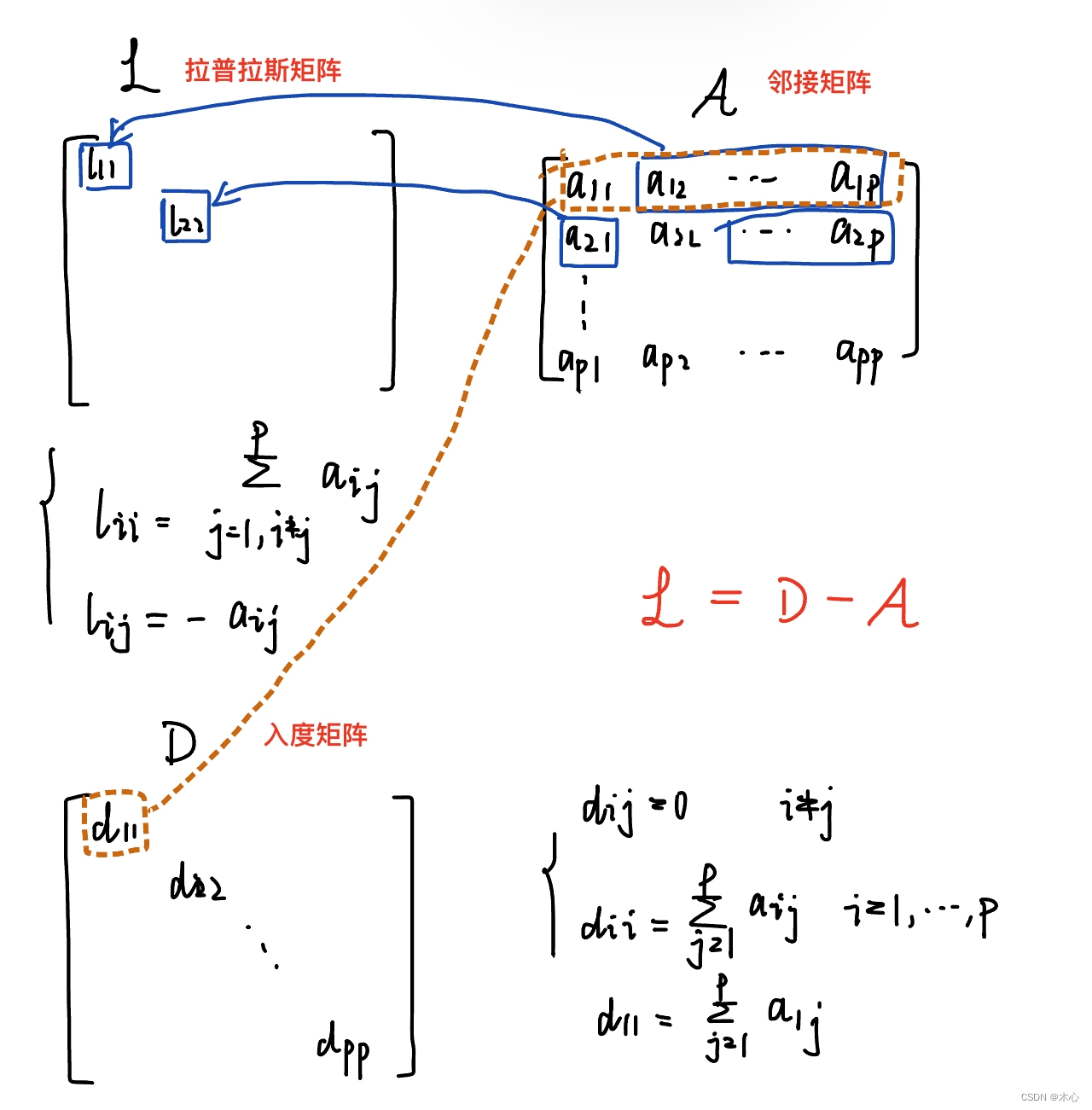
三者基本的关系可以由上图表示。
Reference
Distributed Coordination of Multi-agent Networks Emergent Problems, Models, and Issues