文章信息
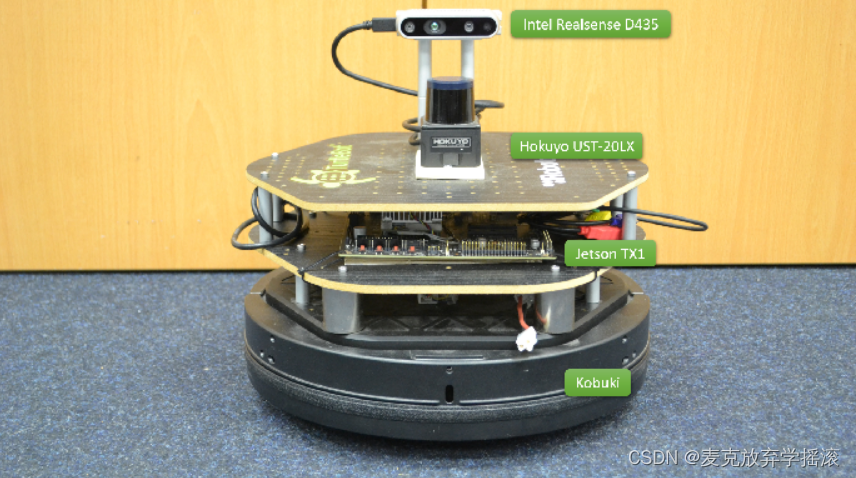
题目:Deep Reinforcement learning for real autonomous mobile robot navigation in indoor environments
作者:Hartmut Surmann, Christian Jestel, Robin Marchel, Franziska Musberg, Houssem Elhadj, Mahbube Ardani
来源:arXiv
原文链接:https://arxiv.org/abs/2005.13857
源代码链接:https://github.com/RoblabWh/RobLearn
准备工作
1. 环境需求
- Python 3.5 / 3.6
- gnuplot-x11(实现可视化)
- cuda (=9.0)
- cudnn (=7.1.2)
- keras (=2.2.2)
- tensorflow-gpu (=1.9.0)
2. Anaconda环境搭建
首先使用Anaconda创建一个用于运行本程序的虚拟环境,环境建立使用以下指令
conda create -n py35_tf python=3.5
博主使用的是Python3.5,实际使用时Python3.6亦可。
接着是安装tensorflow,cudatoolkit,cudnn这三个模块,原文给出的方法是通过下载安装包,并使用sudo dpkg的方法来安装。博主一开始也使用的是这种方法,这种方法过程很繁琐,经常跳出奇怪错误,甚至还会自动改变电脑的显卡驱动导致开机黑屏或显示异常。
对此,博主选择了一种更为简单粗暴的方法:
首先,先给Anaconda添加第三方源:
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --set show_channel_urls yes
其次,直接使用一条指令同时安装三个模块
conda install tensorflow-gpu=1.9 cudatoolkit=9.0 cudnn=7.1
这种方法简单粗暴,且不易出错。当然,如果读者在使用这种方法时出现问题的话,也可以退而求其次,尝试原文给出的方法。
除了上面所需要的部分,numpy与keras模块也必不可少,这两个模块的安装很简单,直接使用conda install ...即可,这里不过多做解释。
3. 仿真过程可视化
最后,我们还要下载gnuplot-x11这个软件,用于实现导航仿真的可视化,安装指令如下
apt-get install gnuplot-x11
其他内容无需配置,后文运行程序时会自动跳出GUI窗口。
运行程序
注意:读者需要根据自己的Python版本调整文件:**‘Simulation2d/CMakeLists.txt’ **中第19行的内容。若读者使用的Python版本为3.6,则应将python-py35改为 python.py36
运行终端指令:
cd NeuronalNetwork
bash build.sh
进入创建的conda环境:
conda activate py35_tf
运行训练程序:
./_ga3c_clean.sh &&
./_ga3c_train.sh
若前文环境配置与程序初始化没有问题的话,程序会正常开始训练,并有如下所示的界面:
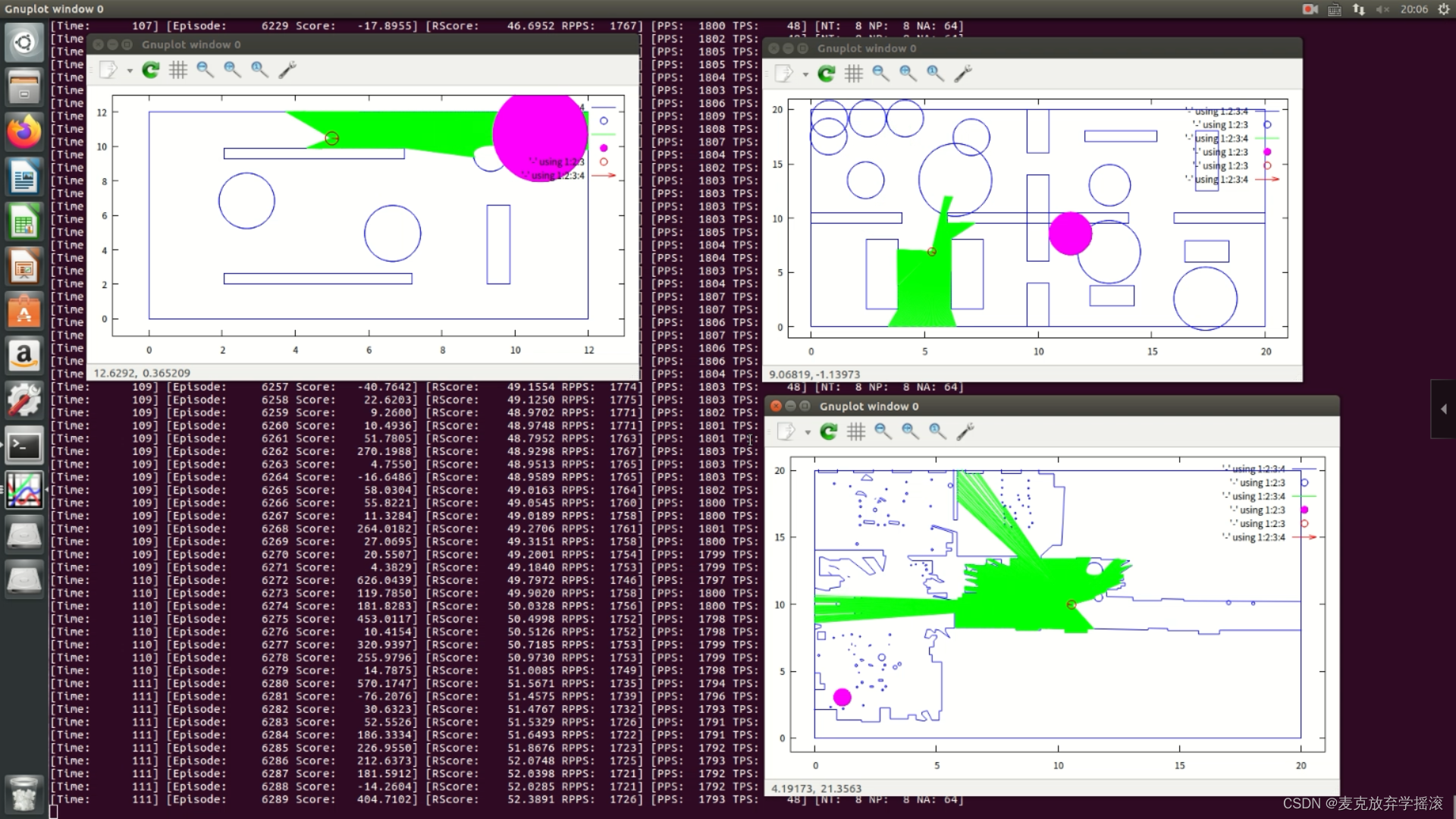
此时,程序运行成功!