Tri-net 将 tri-training 与深度学习模型相结合. 首先学习三个初始模型, 然后使用每个模型来预测一个未标记数据池, 其中两个模型为另一个模型标记一些未标记实例. Tri-net 中涉及三个关键技术: 模型初始化、多样性增强和伪标签编辑.
论文地址: Tri-net for Semi-Supervised Deep Learning
代码地址: http://www.lamda.nju.edu.cn/code_Tri-net.ashx?AspxAutoDetectCookieSupport=1
会议: IJCAI 2018
任务: 分类
关键技术如下:
- Output Smearing: 使用输出调制法(output smearing)生成多样化和准确的初始模型.
- Diversity Augmentation: 在标记数据的某些特定轮次中对模块进行微调, 增加它们之间的多样性.
- Pseudo-Label Editing: 基于稳定伪标签更可靠的直觉, 提出名为 DES 的数据编辑方法.
Tri-net 算法
定义 L = { ( x l , y l ) ∣ l = 1 , … , L } \mathcal{L}=\{(x_l,y_l) \vert l=1,\dots,L\} L={ (xl,yl)∣l=1,…,L} 为标记数据集, U = { ( x u ) ∣ u = 1 , … , U } \mathcal{U}=\{(x_u)\vert u=1,\dots,U\} U={ (xu)∣u=1,…,U} 为未标记数据集, 标签 y l = ( y l 1 , … , y l C ) y_l=(y_{l1},\dots,y_{lC}) yl=(yl1,…,ylC) 表示 C C C 个类别, 如果 y l c = 1 y_{lc}=1 ylc=1, 则表示当前实例属于第 c c c 个类别, 而 y l c = 0 y_{lc}=0 ylc=0 时则不是, 即 one-hot 编码的形式.
Tri-net 的训练过程如下图:
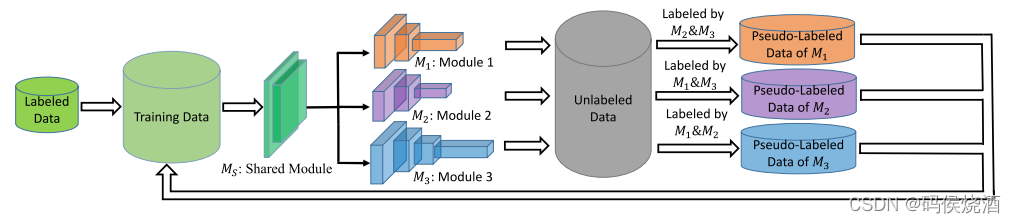
阶段1: 初始化
Tri-net 的第一步是生成三个多样的模型. Tri-net 由一个共享模型 M S M_S MS 和另外三个不同的模型 M 1 M_1 M1, M 2 M_2 M2 和 M 3 M_3 M3 组成. 为了得到三个准确多样的模型, 使用 Output Smearing 来生成三个不同的标记数据集: L o s 1 \mathcal{L}^1_{os} Los1, L o s 2 \mathcal{L}^2_{os} Los2 和 L o s 3 \mathcal{L}^3_{os} Los3. 在三个数据集上同时训练 M S M_S MS, M 1 M_1 M1, M 2 M_2 M2 和 M 3 M_3 M3. 网络结构如下:

阶段2: 训练
和 tri-training 思想一样, 如果两个模型对未标记示例的预测达成一致, 并且预测可靠且稳定, 则将这个具有伪标签示例加入到第三个模型的训练集中. 然后用增强的训练集细化第三个模型. 由于模型之间相互挑选增加了训练集, 所以三个模型会越来越相似. 为了解决这个问题, 对标记数据上的模型进行微调, 以在某些特定轮次中增加它们之间的多样性. 整个训练过程如下所示:

- 步骤1. 在 L \mathcal{L} L 上使用 Output Smearing 生成三个不同的标记数据集: L o s 1 \mathcal{L}^1_{os} Los1, L o s 2 \mathcal{L}^2_{os} Los2 和 L o s 3 \mathcal{L}^3_{os} Los3.
- 步骤2. 在 L o s 1 \mathcal{L}^1_{os} Los1, L o s 2 \mathcal{L}^2_{os} Los2 和 L o s 3 \mathcal{L}^3_{os} Los3 上训练 M S M_S MS, M 1 M_1 M1, M 2 M_2 M2, M 3 M_3 M3.
- 步骤3. 训练 M v , v = 1 , 2 , 3 M_v, v=1,2,3 Mv,v=1,2,3. 初始化挑选样本集 P L v \mathcal{PL}_v PLv, 首先通过 Labeling 函数让另外两个模型挑选出置信示例, 并添加到 P L v \mathcal{PL}_v PLv 中, 接着, 利用 DES 方法对 P L v \mathcal{PL}_v PLv 进行更新, 最后得到 M v M_v Mv 的训练样本 L ^ v = L ∪ P L v \hat{\mathcal{L}}_v=\mathcal{L} \cup \mathcal{PL}_v L^v=L∪PLv. 注意, 如果刚开始训练 M 1 M_1 M1 时, 模型 M S M_S MS 和 M 1 M_1 M1 一同通过 L ^ v \hat{\mathcal{L}}_v L^v 训练, 其他两个模型进行训练时则不需要再对 M S M_S MS 进行训练.
- 重复步骤3 T T T 次, 最终返回训练完成的 M S M_S MS, M 1 M_1 M1, M 2 M_2 M2, M 3 M_3 M3.
Diversity Augmentation 多样性增强
为了防止 collapsed neural networks 问题, 还会在某些 epoch 中继续使用 Output Smearing. 即在步骤3中, 训练 M v M_v Mv 之前, 利用 Output Smearing 再次生成 L o s 1 \mathcal{L}^1_{os} Los1, L o s 2 \mathcal{L}^2_{os} Los2 和 L o s 3 \mathcal{L}^3_{os} Los3, 并训练 M S M_S MS, M 1 M_1 M1, M 2 M_2 M2, M 3 M_3 M3. Tri-net 中选择的 epoch 时机为: 在 N t = U N_t=U Nt=U 且 m o d ( t , 4 ) = = 0 mod(t, 4) == 0 mod(t,4)==0 时进行操作. 这里 N t N_t Nt 表示数据缓冲池的大小, 缓冲池用来存放从 U \mathcal{U} U 中选择的未标记数据, 这个思想来自 Co-Training.
Output Smearing 输出调制
类似数据增强(数据增强是将噪声添加到标记数据集中), Output Smearing 通过将随机噪声注入到真实标签来构造不同的训练集, 并分别从不同的训练集中生成模型:
y ^ l c = y l c + R e L U ( z l c × s t d ) \hat{y}_{lc}=y_{lc} + \mathrm{ReLU}(z_{lc} \times std) y^lc=ylc+ReLU(zlc×std)
其中 z l c z_{lc} zlc 是在标准正态分布进行的独立采样, s t d std std 是标准偏差, R e L U \mathrm{ReLU} ReLU 是一个函数, 确保 y ^ l c \hat{y}_{lc} y^lc 非负, 其在神经网络中常用来做激活函数:
R e L U ( a ) = { a a > 0 0 a ≤ 0 \mathrm{ReLU}(a)= \begin{cases} a & a>0 \\ 0 & a\leq 0 \end{cases} ReLU(a)={
a0a>0a≤0
然后对 y ^ l c \hat{y}_{lc} y^lc 进行归一化(相当于是转化为了概率形式):
y ^ l = ( y ^ l 1 , … , y ^ l C ) / ∑ c = 1 C y ^ l c \hat{y}_{l}=(\hat{y}_{l1},\dots,\hat{y}_{lC})/\sum_{c=1}^C\hat{y}_{lc} y^l=(y^l1,…,y^lC)/c=1∑Cy^lc
通过 Output Smearing, 生成三个训练集 L o s v = { ( x l , y ^ l ) ∣ 1 ≤ l ≤ L } ( v = 1 , 2 , 3 ) \mathcal{L}_{os}^v=\{(x_l,\hat{y}_l)\vert 1\leq l \leq L\}(v=1,2,3) Losv={
(xl,y^l)∣1≤l≤L}(v=1,2,3), 并利用其初始化 M 1 M_1 M1, M 2 M_2 M2, M 3 M_3 M3, 损失函数如下:
L o s s = 1 L ∑ l = 1 L { L y ( M 1 ( M S ( x l ) ) , y ^ l 1 ) + L y ( M 2 ( M S ( x l ) ) , y ^ l 2 ) + L y ( M 3 ( M S ( x l ) ) , y ^ l 3 ) } Loss=\frac{1}{L}\sum_{l=1}^L\{L_y(M_1(M_S(x_l)),\hat{y}_l^1)+L_y(M_2(M_S(x_l)),\hat{y}_l^2)+L_y(M_3(M_S(x_l)),\hat{y}_l^3)\} Loss=L1l=1∑L{
Ly(M1(MS(xl)),y^l1)+Ly(M2(MS(xl)),y^l2)+Ly(M3(MS(xl)),y^l3)}
其中, L y L_y Ly 为标准 softmax 交叉熵损失函数.
Pseudo-Label Editing 伪标签编辑
新标注样本的伪标签可能不正确, 这些不正确的伪标签会降低性能(相当于在训练集中添加噪声). 在半监督学习中的一些数据编辑方法通常是基于图的, 由于高维度而难以在 DNN 中使用. 在这里, 使用一种用于具有 dropout 的 DNN 的新数据编辑方法(也是作者团队在2014年提出的).
对于每个 ( x i , y ‾ i ) (x_i, \overline{y}_i) (xi,yi)( y ‾ i \overline{y}_i yi 是测试模式下的伪标签), 使用模型预测 x i x_i xi 的标签 K K K 次, 并记录预测与 y ‾ i \overline{y}_i yi 不同的频率 k k k. 如果 k > K 3 k > \frac{K}{3} k>3K, 则认为 x i x_i xi 的伪标签 y ‾ i \overline{y}_i yi 是一个不稳定的伪标签. 可以理解为如果 x i x_i xi 的多次预测的伪标签相同, 则这个伪标签是稳定的.
后验概率
Tri-net 的后验概率为三个模型的后验概率的平均值. 未标记示例 x x x 以最大后验概率进行分类:
y = arg max c ∈ { 1 , … , C } { p ( M 1 ( M S ( x ) ) = c ∣ x ) + p ( M 2 ( M S ( x ) ) = c ∣ x ) + p ( M 3 ( M S ( x ) ) = c ∣ x ) } y=\argmax_{c\in\{1,\dots,C\}}\{p(M_1(M_S(x))=c|x)+p(M_2(M_S(x))=c|x)+p(M_3(M_S(x))=c|x)\} y=c∈{
1,…,C}argmax{
p(M1(MS(x))=c∣x)+p(M2(MS(x))=c∣x)+p(M3(MS(x))=c∣x)}