一.TF功能包
TF功能包可以计算所有坐标之间的关系,默认会记录10始终系统中所有的坐标系关系。
TF功能包通过TF树来记录坐标之间的关系。
二、海龟跟随
1.下载 tf 功能包
sudo apt-get install ros-noetic-turtle-tf
(注意这里noetic是我的ROS版本,如果你的ROS是其他版本要做相应的更换)
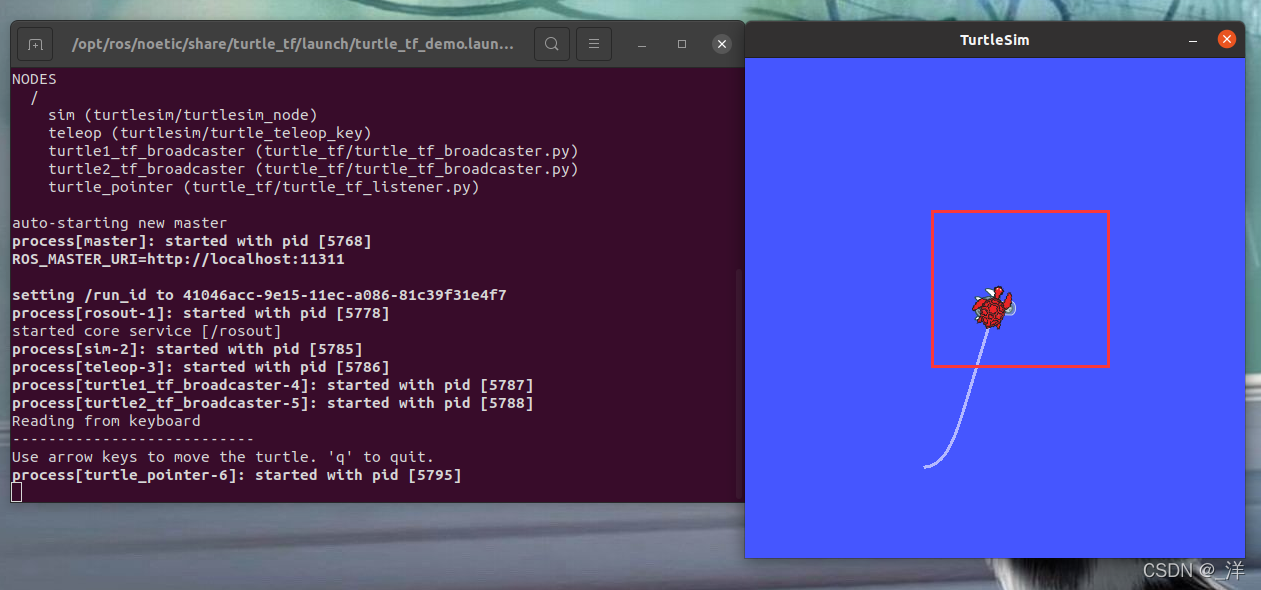
2.roslaunch来启动脚本文件
roslaunch turtle_tf turtle_tf_demo.launch
就会出现两只海龟
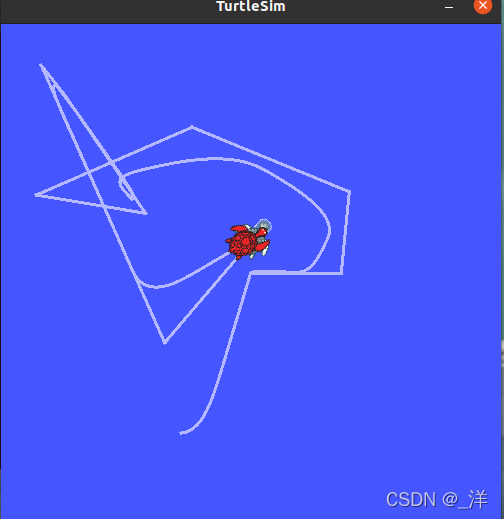
3.控制一只海龟运动
rosrun turtlesim turtle_teleop_key
发现另一只海龟跟着走
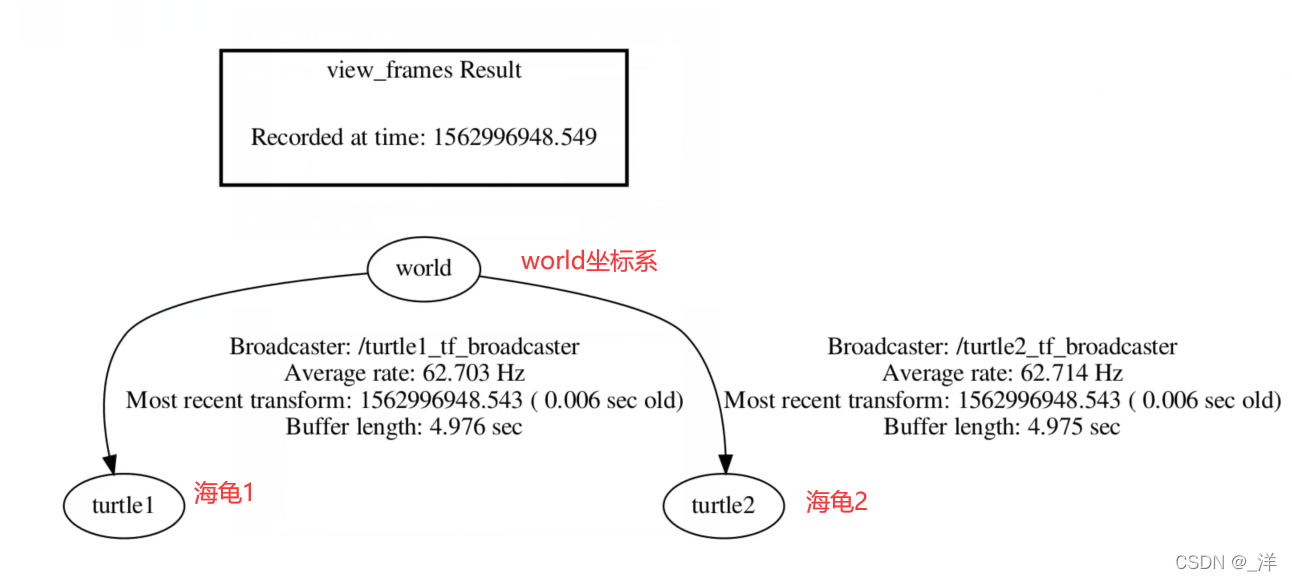
4.查看所有坐标的关系:
rosrun tf view_frames
(如果报错参见:frames报错解决)