ROS学习笔记:TF坐标变换及编程练习
关于TF的基本概念及实现方法详见上一篇博文:ROS学习笔记:TF坐标变换及编程详解
本文我们在之前的基础上进行TF的编程练习。
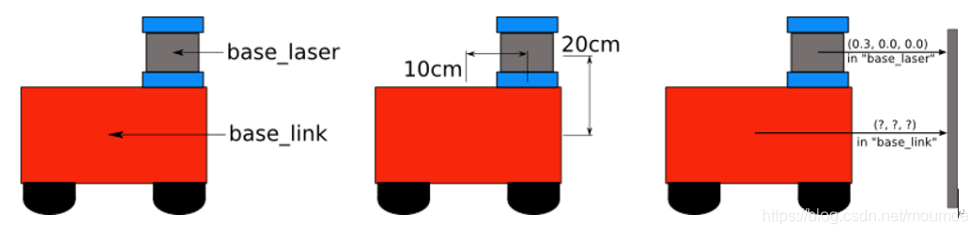
TF编程:广播并监听机器人的坐标变换,已知激光雷达和机器人底盘的坐标关系,求激光雷达数据在底盘坐标系下的坐标值
我们按照TF的使用流程进行编程:
TF广播器编程
实现流程:
- 初始化ROS节点
- 定义一个广播器
- 创建坐标变换Transform,并初始化相关信息
- 广播器发布变换信息
程序具体实现如下:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv)
{
//初始化ROS节点
ros::init(argc, argv, "tf_broadcaster");
ros::NodeHandle n;
//声明一个tf广播器
tf::TransformBroadcaster br;
while(ros::ok())
{
//创建坐标变换transform
tf::Transform transform;
//给定平移变换值
transform.setOrigin(tf::Vector3(0.1, 0.0, 0.2));
//给定旋转变换值,这里没有旋转变换,所以定义四元数时无需给定角度
transform.setRotation(tf::Quaternion(0, 0, 0, 1));
//广播器发布坐标变换
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "base_link", "base_laser"));
}
return 0;
}
TF监听器编程
实现流程:
- 初始化ROS节点信息
- 声明一个TF监听器
- 创建“base_laser”上的点,并获取相应值
- 监听获取变换信息,并由“base_laser”上的点转换得到“base_link”上的坐标点
实现细节:
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/PoseStamped.h>
int main(int argc, char** argv)
{
//初始化ROS节点信息
ros::init(argc, argv, "tf_listener");
ros::NodeHandle n;
//创建TF监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while(ros::ok())
{
//在base_laser上声明一个点laser_point,用来转换得到base_link上的点坐标
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "base_laser";
//使用最近可用的转换
laser_point.header.stamp = ros::Time();
//laser_point检测点获取
laser_point.point.x = 0.3;
laser_point.point.y = 0.0;
laser_point.point.z = 0.0;
try
{
//监听获取tf变换
listener.waitForTransform("base_link", "base_laser", ros::Time(0), ros::Duration(3.0));
geometry_msgs::PointStamped base_point;
base_point.header.frame_id = "base_link";
listener.transformPoint("base_link", laser_point, base_point);
//将坐标变换值进行打印
ROS_INFO("Change laser_point:(%.2f, %.2f, %.2f) to base_point(%.2f, %.2f, %.2f) at Time %.2f", laser_point.point.x, laser_point.point.y, laser_point.point.z, base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex)
{
ROS_ERROR("%s", ex.what());
ros::Duration(1.0).sleep();
continue;
}
rate.sleep();
}
return 0;
}
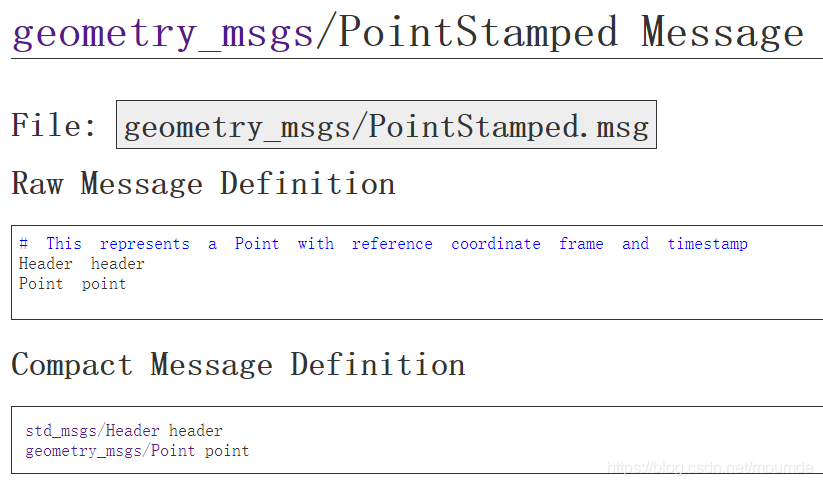
下图是“geometry_msgs/PoseStamped.h”消息内的内容,声明了2个类型:header和point
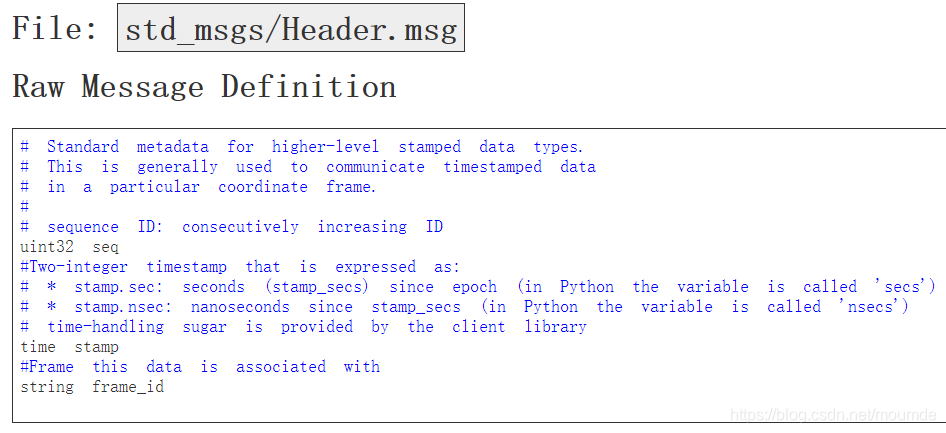
header内部
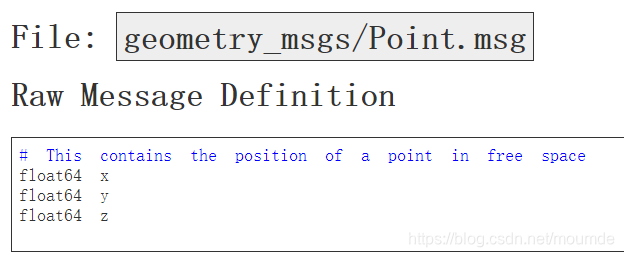
point内部
配置Launch文件

然后配置一下CMakeLists.txt和package.xml文件就可以执行了。
以下是结果
