一、创建文件和功能包
mkdir -p ./tf_turtlesim/src
cd ./tf_turtlesim/
catkin_make
cd ./src
catkin_create_pkg learning_tf roscpp geometry_msgs tf turtlesim //创建功能包
cd ../
catkin_make
code .
二、创建广播程序turtle_tf_broadcaster.cpp,用于广播乌龟A的位姿
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// tf广播器
static tf::TransformBroadcaster br;
// 根据乌龟当前的位姿,设置相对于世界坐标系的坐标变换
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 发布坐标变换
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化节点
ros::init(argc, argv, "my_tf_broadcaster");
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
};
turtle_name = argv[1];
// 订阅乌龟的pose信息
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
ros::spin();
return 0;
};三、创监听程序turtle_tf_listener.cpp,用于监听乌龟A的位姿
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化节点
ros::init(argc, argv, "my_tf_listener");
ros::NodeHandle node;
// 通过服务调用,产生第二只乌龟turtle2
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle =
node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 定义turtle2的速度控制发布器
ros::Publisher turtle_vel =
node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 10);
// tf监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
tf::StampedTransform transform;
try
{
// 查找turtle2与turtle1的坐标变换
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1和turtle2之间的坐标变换,计算turtle2需要运动的线速度和角速度
// 并发布速度控制指令,使turtle2向turtle1移动
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};四、修改CMakeLists文件
cmake_minimum_required(VERSION 3.0.2)
project(tf_turtlesim)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
tf
turtlesim
)
catkin_package(
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
五、编写robListener.launch文件
<launch>
<!-- 海龟仿真器 -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- 键盘控制 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- 两只海龟的tf广播 -->
<node pkg="ros_turtlesim" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="ros_turtlesim" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<!-- 监听tf广播,并且控制turtle2移动 -->
<node pkg="ros_turtlesim" type="turtle_tf_listener"
name="listener" />
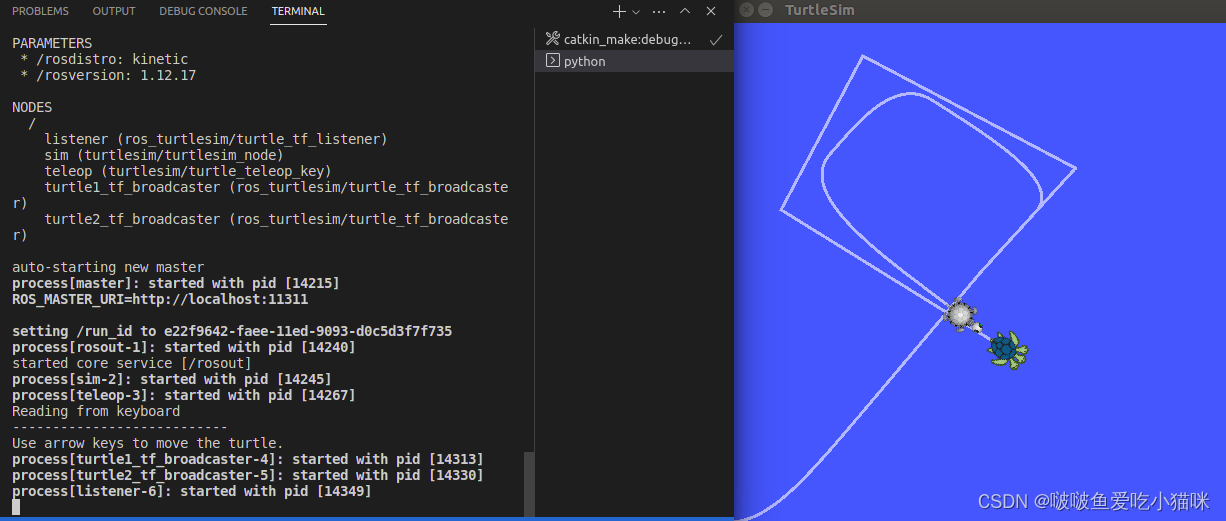
</launch>六、运行程序
在终端1中启动
roscore在终端2中输入
source ./devel/setup.bash
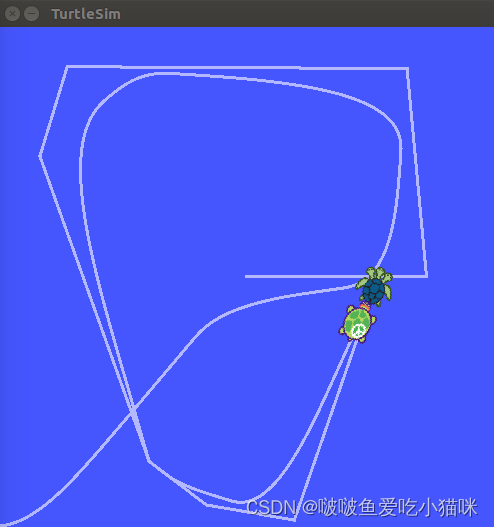
roslaunch ros_turtlesim robListener.launch 会出现小乌龟,将鼠标放在终端2中,就可以通过键盘上下左右键控制小乌龟A的运动,小乌龟B就会跟上来。