学习资料参考:
张平.《OpenCV算法精解:基于Python与C++》.[Z].北京.电子工业出版社.2017.
前言
我们知道在进行拉普拉斯边缘检测时,并没有对图像进行平滑处理,就会对噪声产生明显的响应(可以进行对比实验查看效果)。那么,我们在使用拉普拉斯进行边缘检测时,首先要对图像进行高斯平滑处理,然后再进行拉普拉斯与图像的卷积操作。那么这就需要进行两次卷积运算。而为了将卷积次数控制在一次,聪明的人们发现可以借助二维高斯函数(如下图所示)进行拉普拉斯变换。(真的很佩服这些数学家们!)

我从opencv书上截取推导过程如下所示:
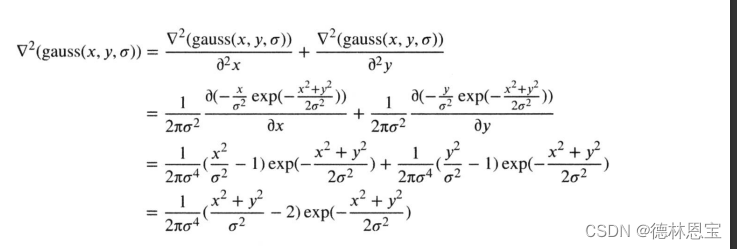
上述得出的最终结果被称为高斯拉普拉斯。
检测原理
- 构建窗口大小为 H ∗ W H*W H∗W、标准差为 σ \sigma σ的高斯拉普拉斯卷积核。

其中 H H H与 W W W均是奇数,并且 H = W H=W H=W,卷积核的锚点在 ( ( H − 1 ) / 2 , ( W − 1 ) / 2 ) ((H-1)/2,(W-1)/2) ((H−1)/2,(W−1)/2)处。 - 然后使用上面构建的卷积核,进行卷积。
- 边缘二值化显示,与Laplace的二值化一样。

python实现
import numpy as np
from scipy import signal
import cv2
def createLoGKernel(sigma, size):
H, W = size
r, c = np.mgrid[0:H:1, 0:W:1]
r -= (H - 1) // 2
c -= (W - 1) // 2
sigma2 = pow(sigma, 2.0)
norm2 = np.power(r, 2.0) + np.power(c, 2.0)
LoGKernel = (norm2 / sigma2 - 2) * np.exp(-norm2 / (2 * sigma2))
return LoGKernel
def LoG(image, sigma, size, _boundary='symm'):
loGKernel = createLoGKernel(sigma, size)
img_conv_log = signal.convolve2d(image, loGKernel, 'same', boundary=_boundary)
return img_conv_log
if __name__ == "__main__":
image = cv2.imread(r"C:\Users\1\Pictures\test1.jpg", 0)
cv2.imshow("原图", image)
img_conv_log = LoG(image, 2, (13, 13), 'symm')
edge_binary = np.copy(img_conv_log)
edge_binary[edge_binary > 0] = 255
edge_binary[edge_binary <= 0] = 0
edge_binary = edge_binary.astype(np.uint8)
cv2.imshow("edge_binary", edge_binary)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果

注意,经过测试发现,标准差越大,图像在边缘上的失真越严重。对于高斯拉普拉斯核的尺寸,一般取 ( 6 ∗ σ + 1 ) ∗ ( 6 ∗ σ + 1 ) (6*\sigma+1)*(6*\sigma+1) (6∗σ+1)∗(6∗σ+1).