一、图像退化
与图像增强相比,在图像恢复中,退化是建模的。 这能够(很大程度上)消除退化的影响。
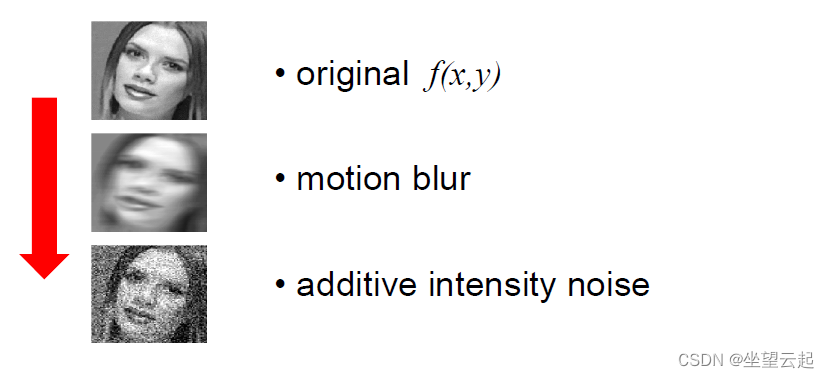
1、图像退化类型
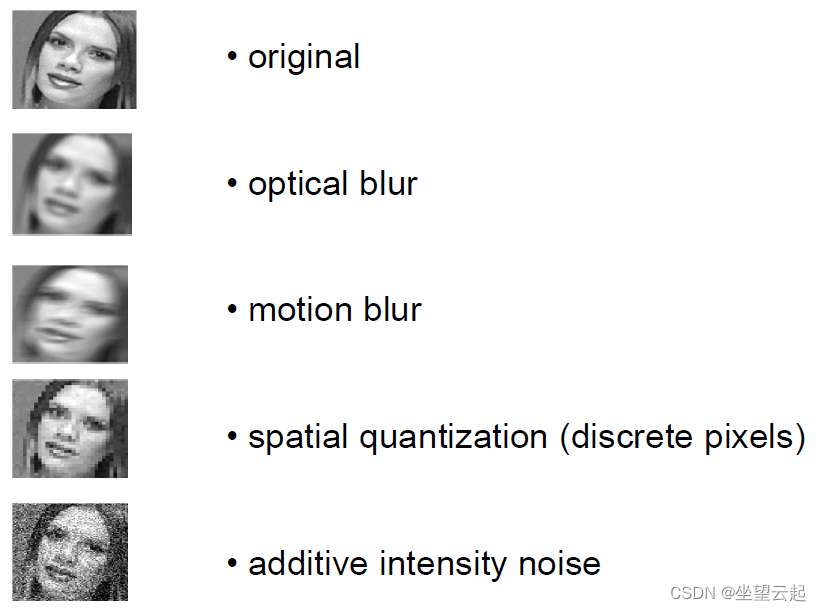
图像恢复的目标是将退化的图像恢复到其原始形式。
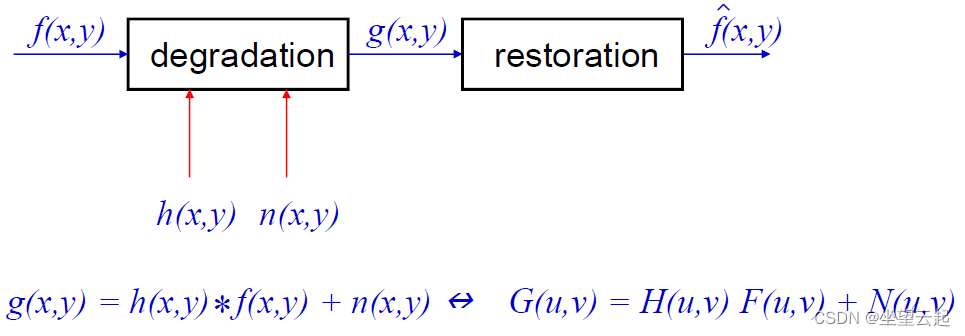
2、反卷积和退化模型
观察到的图像通常可以建模为:其中积分是卷积,
是成像系统的点扩散函数,
是加性噪声。
在这种情况下,图像恢复的目的是从观察到的退化图像中估计原始图像
。
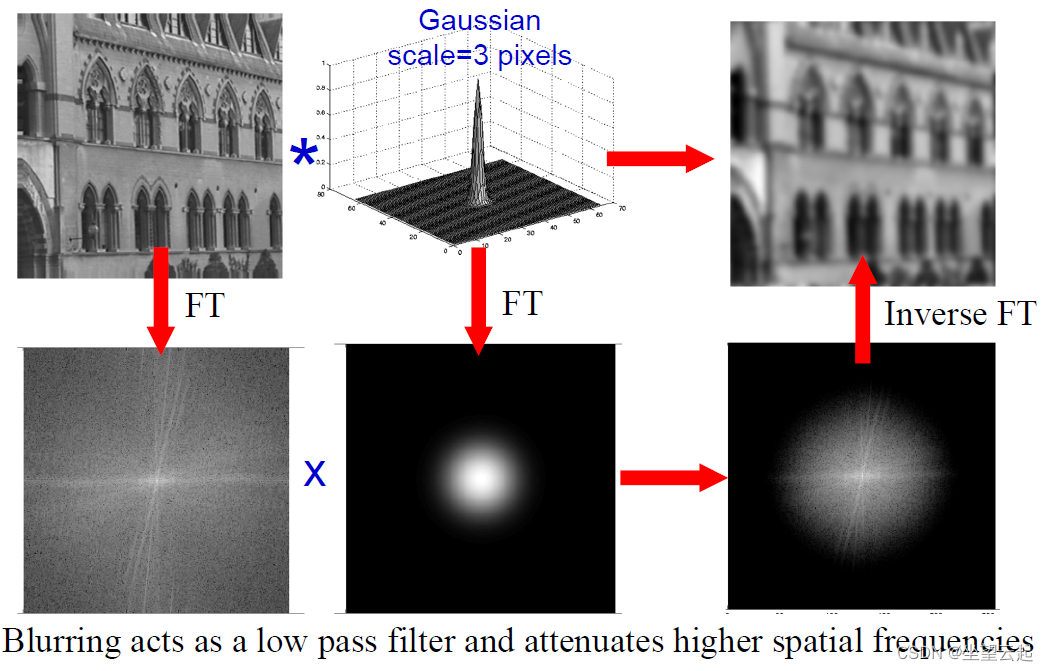
模型退化为具有线性、移位不变量、滤波器的卷积。
示例:对于失焦模糊,将建模为高斯
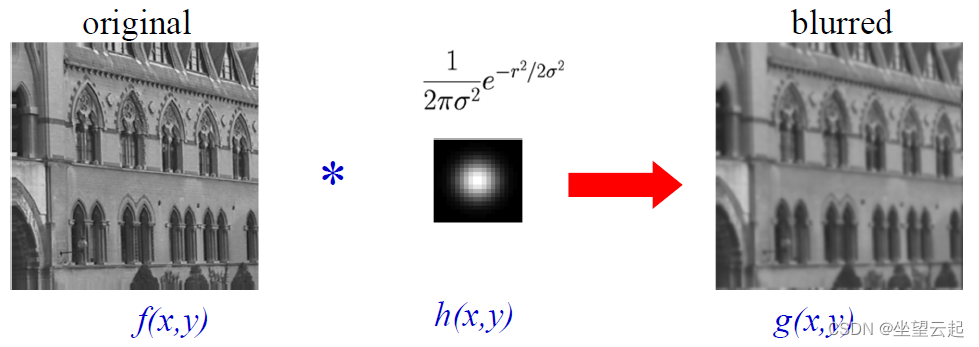
,
是成像系统的脉冲响应或点扩散函数
3、信息丢失和噪音
4、公式定义
– 退化前的图像,“真实图像”
– 退化后的图像,“观察到的图像”
– 退化过滤器
– 根据
计算的
的估计值
– 加性噪声
二、inverse filter
从生成模型开始,暂时忽略 ,然后获得
的估计值
使用逆滤波器恢复
1、一维向量说明

2、去模糊(反卷积)
用高斯点扩散函数模糊图像

使用逆滤波器恢复,其中
是高斯的FT。
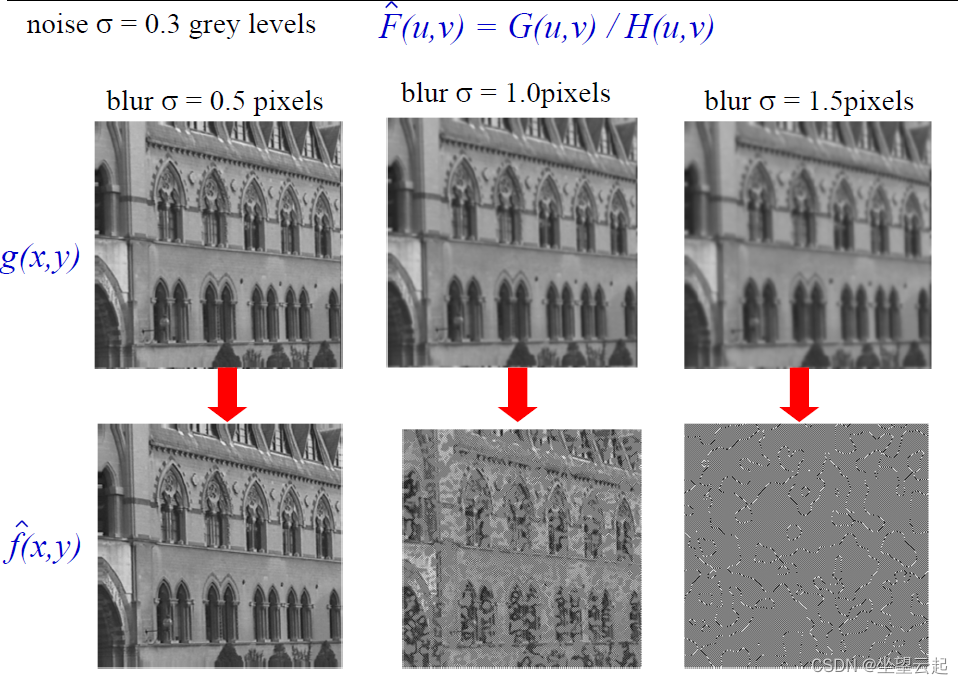
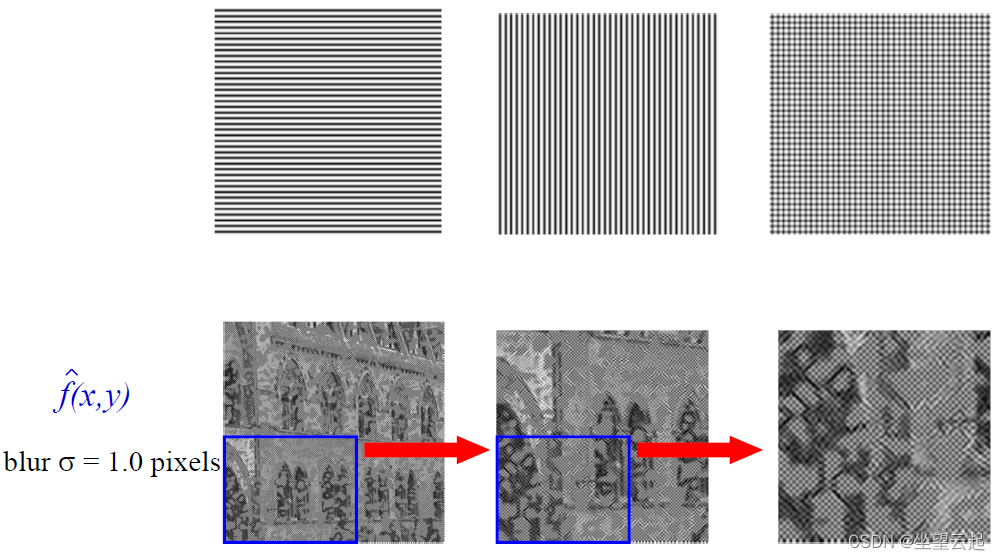
3、噪声放大问题

高空间频率正弦波
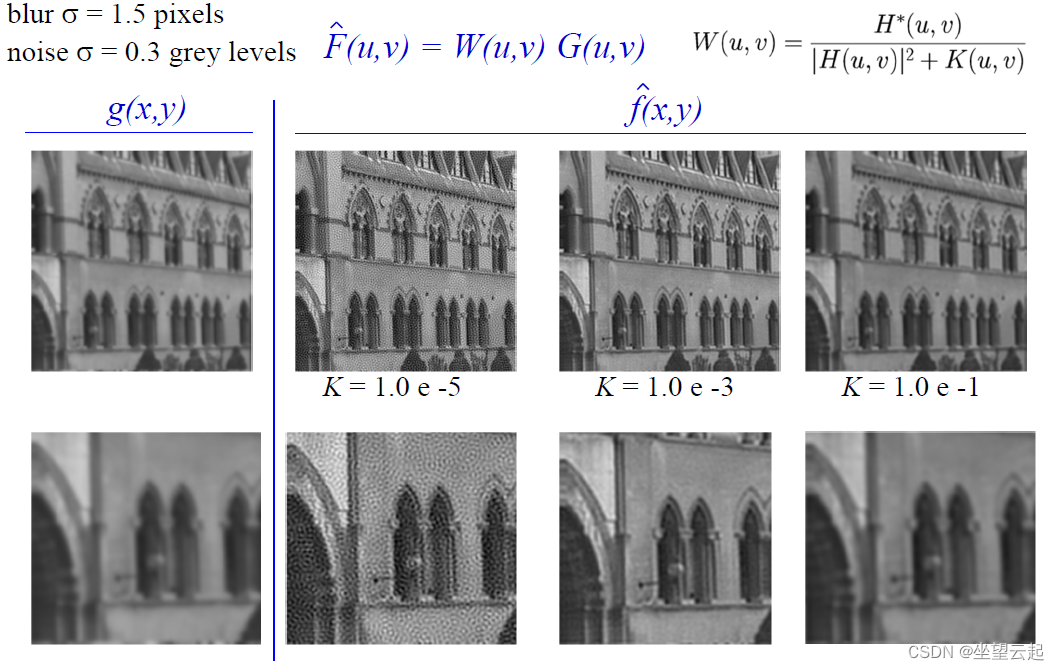
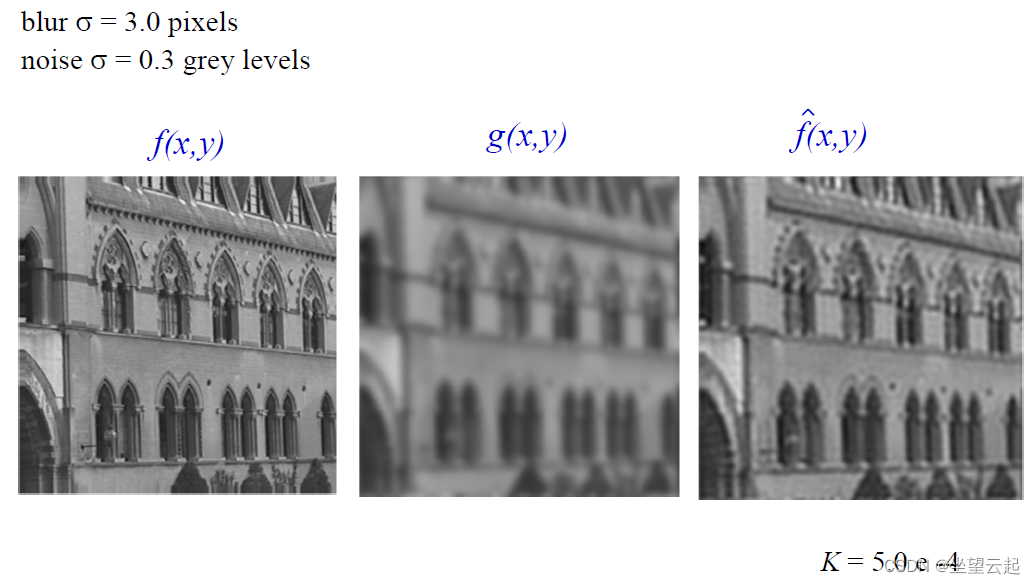
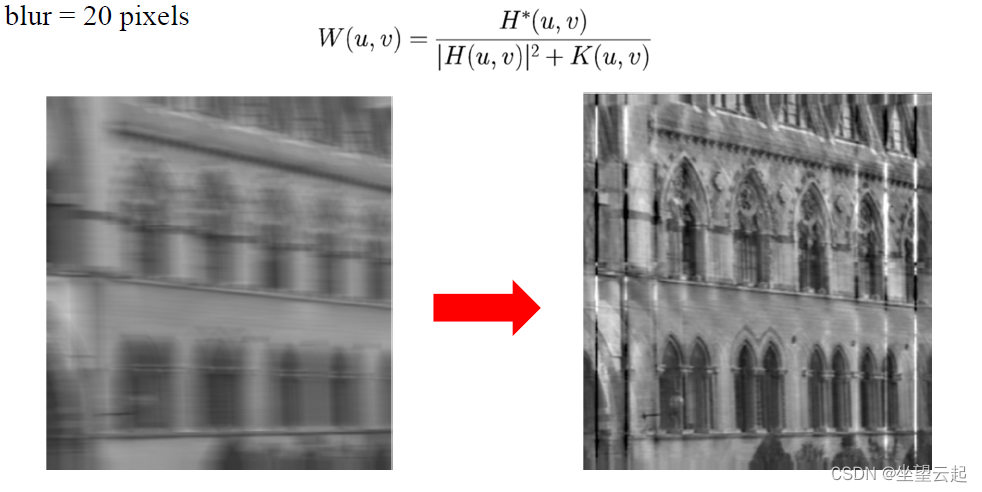
三、Wiener filter
1、维纳滤波


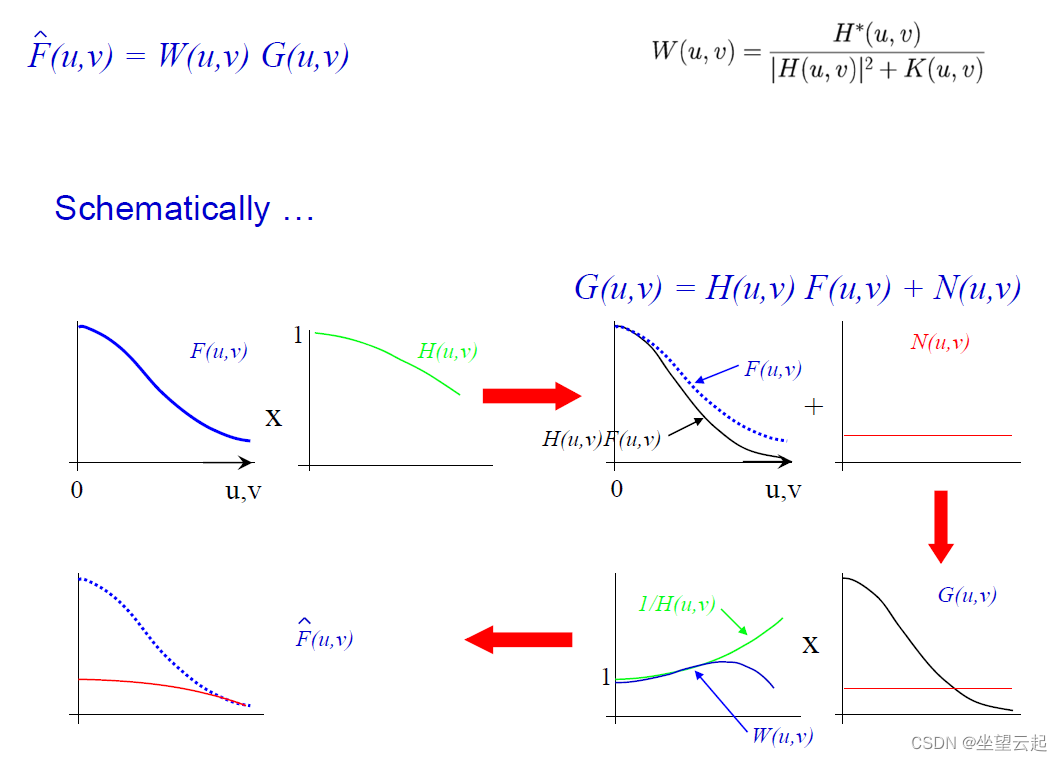
使用维纳滤波器恢复

2、使用维纳滤波器恢复
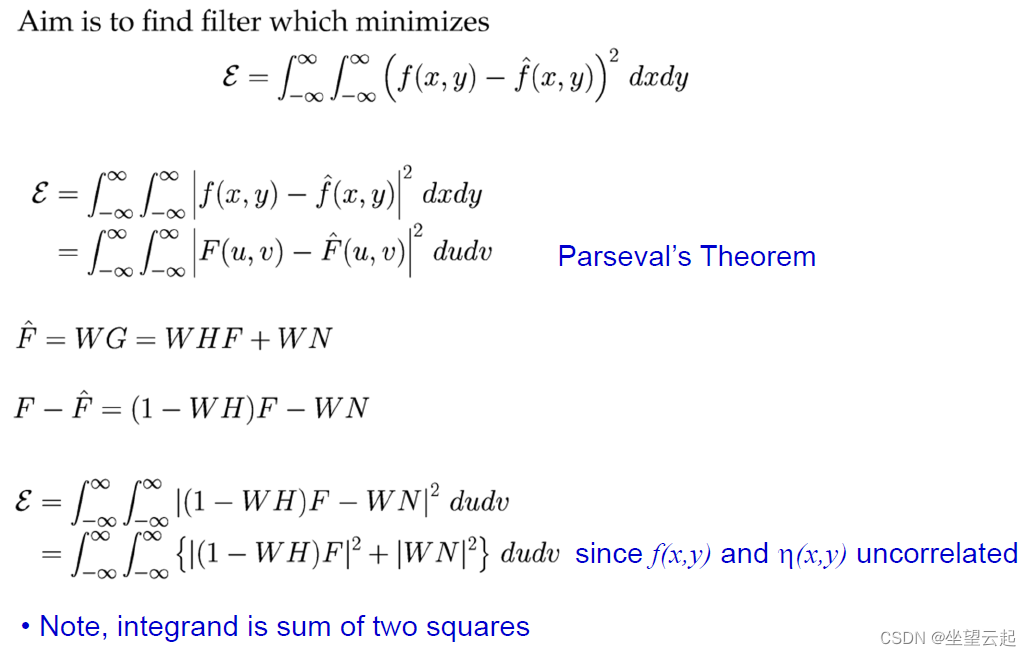
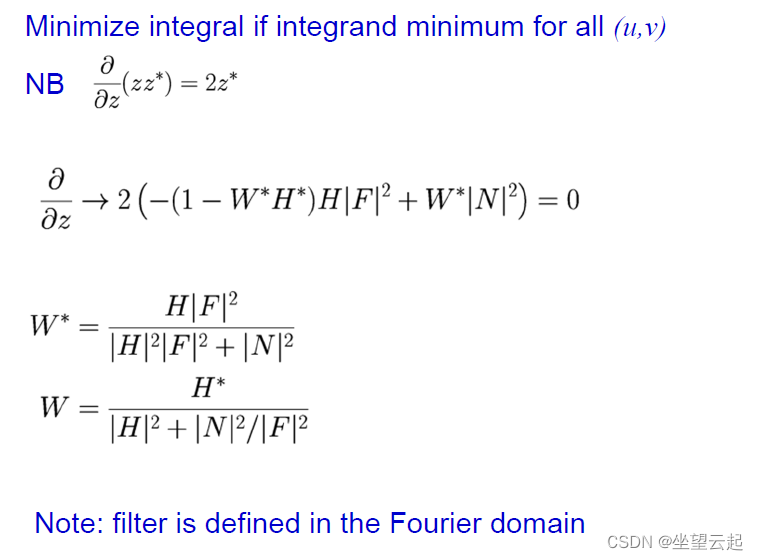
3、公式推导
4、运动去模糊
假设只在水平方向有模糊,例如:获取图像时相机平移



2. 将 FT 乘以 Wiener 滤波器F(u,v) = W(u,v) G(u,v)
3. 计算逆 FT
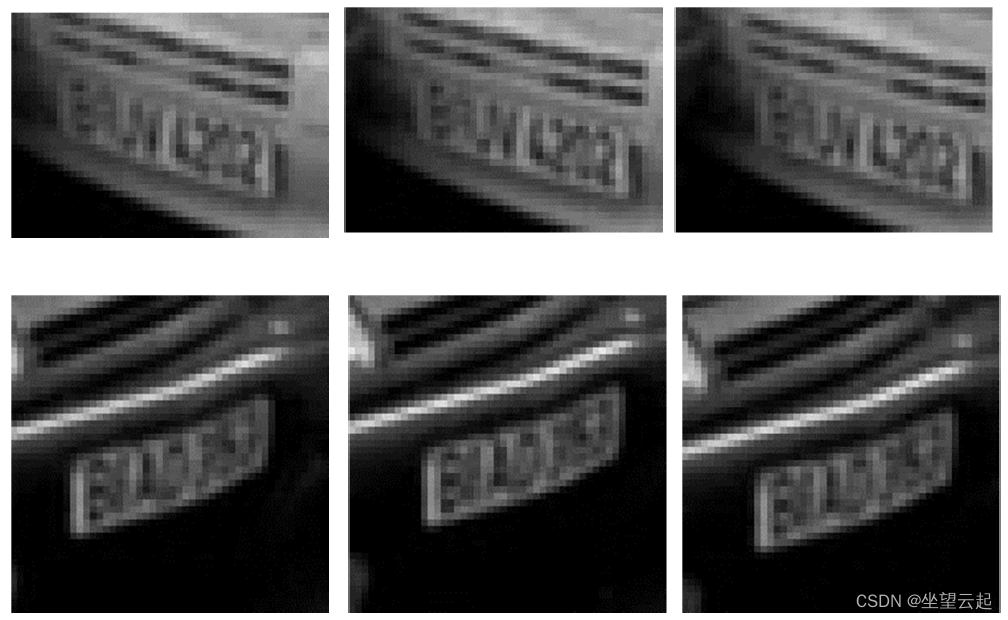
5、应用:读取车牌

计算步骤
1.旋转图像,使模糊是水平的
2.估计模糊长度
3. 构建一个对卷积进行建模的条形图
4. 计算并应用维纳滤波器
5. 优化 K 值

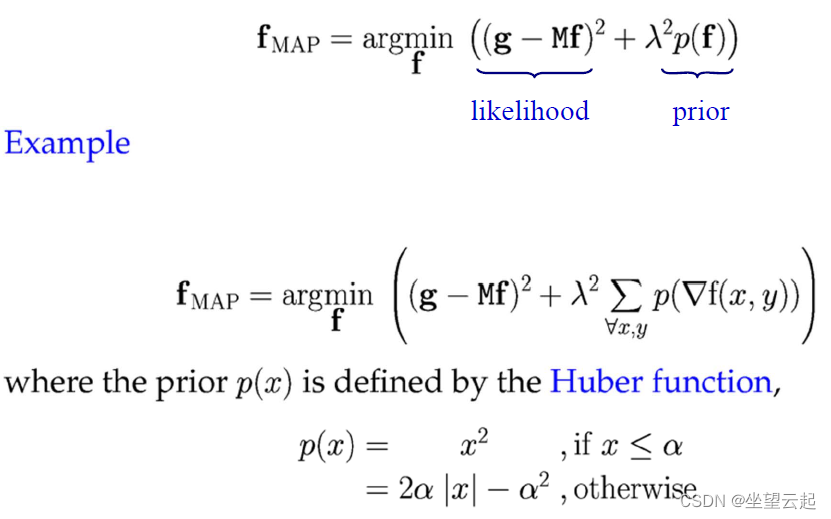
四、最大后验(MAP)估计
最大后验估计(Maximum-a-Posteriori (MAP) Estimation)
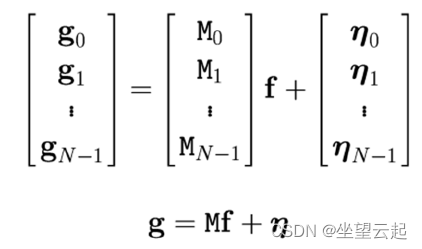
1、生成模型
对于具有 n 个像素的图像,将此过程写为,其中
和
是
维向量,A 是
矩阵。
2、逆问题
通过优化成本函数来估计:

3、示例:超分辨率
假设有多个相同场景的图像,每个图像都在空间上位移……

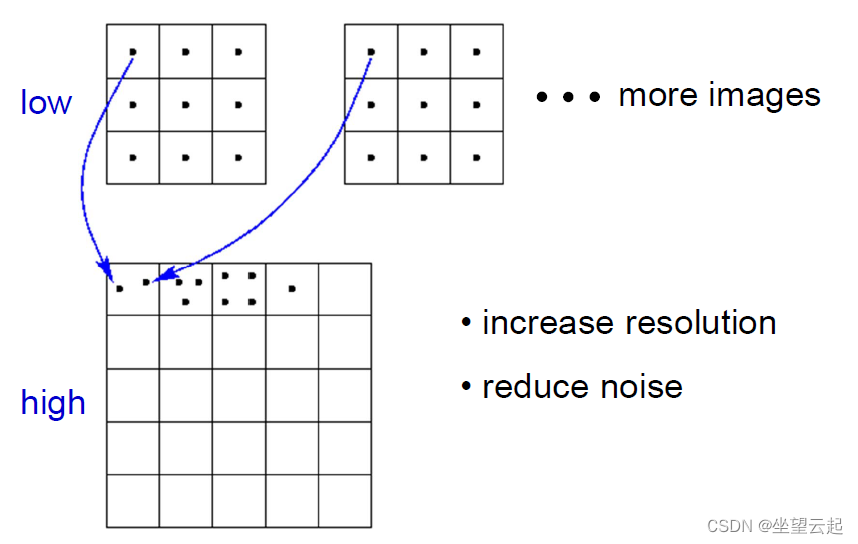
4、生成模型

估计使预测图像和观察图像之间的误差最小化的超分辨率图像。
将一张图像 的生成模型写为
,其中
结合了定位、照明和下采样。
5、最大后验估计
6、超分辨率示例1
火星着陆器提供的 25 张 JPEG 图像图像来自旋转相机的不同扫描


7、超分辨率示例2

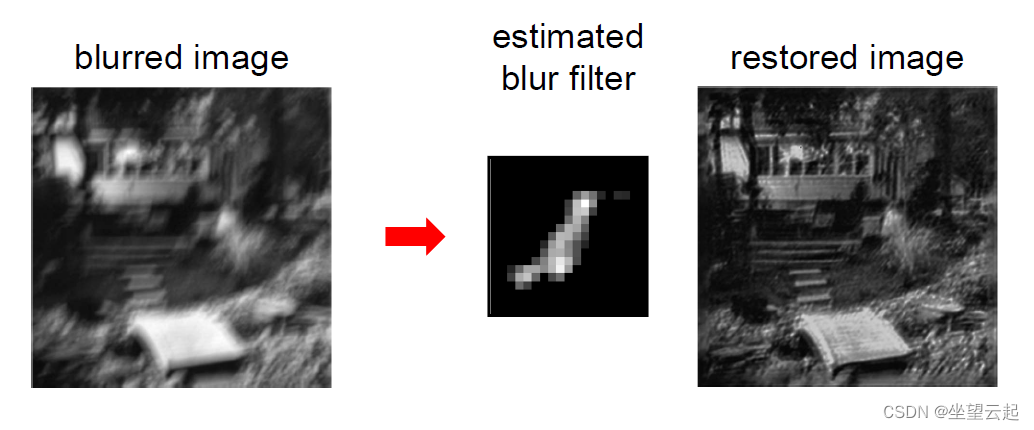
五、Blind deblurring
1、概述
到目前为止,我们有一个前提,是假设我们知道生成模型,例如

即 h(x,y) 是已知的,因此给定观察到的图像 g(x,y),则可以估计(恢复)原始图像 f(x,y)
考虑是否只有观察到的图像 g(x,y) 是已知的。这就是盲目估计的问题。
通过优化成本函数来估计 f(x,y) 和 h(x,y):

2、示例