本篇文章主要讲述的是TI如何基于Doppler相偏补偿进行速度解模糊
文章目录
背景
- 为什么要进行速度解模糊呢?
当一个物体的移动速度超过了雷达可检测的最大速度时,雷达就不能准确的测量物体的速度,因此要增大雷达可检测的最大速度来准确检测目标的速度 - 利用什么方法进行解模糊呢?
中国剩余定理、doppler相偏补偿
基础知识
相关速度公式
雷达速度最大检测公式: V m a x = λ 4 T c V_{max}=\frac{\lambda}{4T_c} Vmax=4Tcλ(1),雷达所需要支持 V m a x V_{max} Vmax越大,chirp的持续时间 T c T_c Tc就要越小
Doppler相偏补偿
角度分辨率的提高导致最大无模糊速度下降
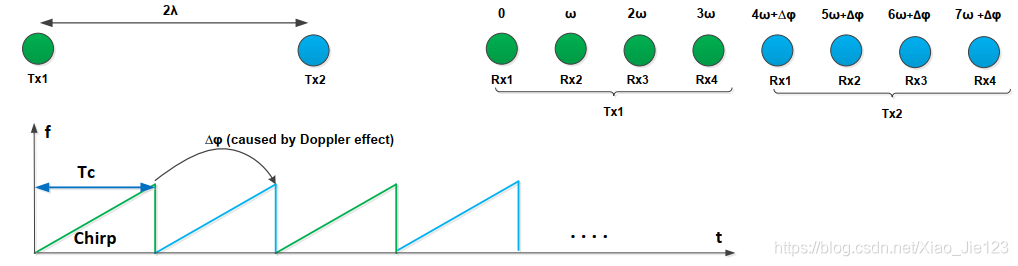
在上图中,雷达的工作方式是2发4收的TDM MIMO,通过Tx1和Tx2在时间上轮流发射chirp,合并四根接收天线在连续的两个chirp周期内的接收数据,虚拟出1发8收的天线阵列,可以提高角度分辨率。但是,这样就会导致等效的chirp周期( T c T_c Tc)相对于1发4收的方式延长了一倍,导致雷达的最大检测速度( V m a x V_{max} Vmax)也下降一半
雷达信号处理中对于目标距离和速度的检测是根据2D-FFT结果的幅值进行的,而对于目标角度的检测是根据所有天线(TDM MIMO)上2D FFT对应目标点的相位进行的。在上图中,2发4收 TDM MIMO的工作方式下由于运动目标的多普勒效应,Tx2形成的4根虚拟天线相对于Tx1形成的4根虚拟天线将会产生一个多普勒相偏 Δ ϕ \Delta \phi Δϕ。在角度估计前要对多普勒相偏进行矫正,才能保证角度估计的正确性
公式推导:
假设雷达发射的chirp信号为: s T ( t ) = c o s ( 2 π f c t + ϕ 0 ) s_T(t)=cos(2\pi f_ct + \phi_0) sT(t)=cos(2πfct+ϕ0)(2)
雷达检测到前方距离为R运动速度为 V r V_r Vr的目标的回波信号为: s R ( t ) = c o s ( 2 π f c ( t − 2 ( R − V r T c ) c ) + ϕ 0 ) s_R(t)=cos(2\pi f_c(t-\frac{2(R-V_rT_c)}{c}) + \phi_0) sR(t)=cos(2πfc(t−c2(R−VrTc))+ϕ0)(3), T c T_c Tc为发射chirp的周期。
则多普勒相偏为: Δ ϕ = 2 π f c T c = 4 π V r f c T c c \Delta \phi=2\pi f_c T_c=\frac{4\pi V_rf_c T_c}{c} Δϕ=2πfcTc=c4πVrfcTc(4)
对于发射天线数 N T x = 2 N_{Tx} = 2 NTx=2,接收天线数 N R x = 4 N_{Rx} = 4 NRx=4的情况,假设在8根虚拟天线( N T x ∗ N R x = 8 N_{Tx}*N_{Rx}=8 NTx∗NRx=8)上对应目标的2D-FFT结果序列为 X ( m , n ) X(m,n) X(m,n),其中m表示这个2D-FFT结果对应的发射天线编号( 0 < m ≤ N T x 0<m\leq N_{Tx} 0<m≤NTx),n表示这个2D-FFT结果对应的接收天线编号( 0 < m ≤ N R x 0<m\leq N_{Rx} 0<m≤NRx),那么相偏补偿为下面公式:
X ′ ( m , n ) = X ( m , n ) ∗ e − j m Δ ϕ , ( 0 < m ≤ N T x , 0 < m ≤ N R x ) X^{'}(m,n)=X(m,n)*e^{-jm\Delta \phi},(0<m\leq N_{Tx},0<m\leq N_{Rx}) X′(m,n)=X(m,n)∗e−jmΔϕ,(0<m≤NTx,0<m≤NRx)(5)
由公式(3)可知,只有首先知道目标的实际 V r V_r Vr才能知道实际的相偏 Δ ϕ \Delta \phi Δϕ,假设雷达的估计的目标速度为 V e s t V_{est} Vest,相偏为 Δ ϕ e s t \Delta \phi_{est} Δϕest。
Δ ϕ e s t = 2 π Δ f T c = 4 π V e s t f c T c c \Delta \phi_{est}=2\pi \Delta f T_c=\frac{4\pi V_{est}f_cT_c}{c} Δϕest=2πΔfTc=c4πVestfcTc(6)
目标的实际速度 V r V_r Vr和雷达估计出的速度 V e s t V_{est} Vest之间满足公式:
V r = V e s t + k ∗ V m a x , k = … , − 1 , 0 , 1 , … V_r=V_{est}+k*V_{max},k=…,-1,0,1,… Vr=Vest+k∗Vmax,k=…,−1,0,1,…(7)
情况1: V r < V m a x V_r<V_{max} Vr<Vmax
当目标的实际速度 V r V_r Vr小于雷达最大检测速度 V m a x V_{max} Vmax时(k=0),目标实际速度 V r V_r Vr等于雷达估计出的速度 V e s t V_{est} Vest, V r = V e s t V_r=V_{est} Vr=Vest,此时的多普勒相偏 Δ ϕ e s t \Delta \phi _{est} Δϕest可由 V e s t V_{est} Vest代入公式(4)得到,将 Δ ϕ e s t \Delta \phi _{est} Δϕest代入公式(5),可以通过 V e s t V_{est} Vest完全纠正多普勒相偏 Δ ϕ \Delta \phi Δϕ,后续的角度FFT可以获得目标角度对应的FFT峰值
情况2: V r > V m a x V_r>V_{max} Vr>Vmax
当目标的实际速度 V r V_r Vr大于雷达最大检测速度 V m a x V_{max} Vmax时( k ≠ 0 k\neq 0 k=0),雷达计算的速度是一个模糊值。
V r = V e s t + k ∗ V m a x , k = … , − 1 , 1 , … V_r = V_{est}+k*V_{max},k=…,-1,1,… Vr=Vest+k∗Vmax,k=…,−1,1,…(8)
结合公式(1),(4),(6),(7),可以得到: Δ ϕ = Δ ϕ e s t + k ∗ π , k = … , − 1 , 1 , … \Delta \phi=\Delta \phi _{est}+k*\pi,k=…,-1,1,… Δϕ=Δϕest+k∗π,k=…,−1,1,…(9)
从公式(9)可知,目标实际产生的相偏 Δ ϕ \Delta \phi Δϕ等于雷达估计出的相偏值 Δ ϕ e s t \Delta \phi_{est} Δϕest,将修正后的相偏值代入到公式(5),才能完全纠正多普勒相偏 Δ ϕ \Delta \phi Δϕ,后续的角度FFT才可以获得目标角度对应的FFT峰值
TI算法
基于Doppler相偏补偿的速度扩展算法描述
- 根据公式(6)由雷达估计的目标速度 V e s t V_{est} Vest计算多普勒相偏 Δ ϕ e s t \Delta \phi _{est} Δϕest
- 将 Δ ϕ e s t \Delta \phi _{est} Δϕest代入公式(5)对虚拟天线(m,n)上的目标2D-FFT的结果 X ( m , n ) X(m,n) X(m,n)进行多普勒相偏矫正,得到 X ′ ( m , n ) X'(m,n) X′(m,n)
- 对序列 X ′ ( m , n ) X'(m,n) X′(m,n)进行角度FFT,并计算FFT结果的幅度平方,保存结果到set0,“uncorrected set”
- 对序列 X ′ ( m , n ) X'(m,n) X′(m,n)按照下面的公式进行符号调整 X ′ ′ ( m , n ) = c o n j [ X ′ ( m , n ) ] , i f ( m = 1 ) X''(m,n)=conj[X'(m,n)],if(m=1) X′′(m,n)=conj[X′(m,n)],if(m=1)
- 对序列 X ′ ′ ( m , n ) X''(m,n) X′′(m,n)进行角度FFT,并计算FFT结果的幅度平方,保存结果到set1,“conrrected set”
- 在set0和set1中搜索最大值,并记录下最大值所在的set
- 如果最大值在set1中出现,按照下面的公式进行速度扩展
{ V c o r r = V e s t + 2 V m a x , i f ( V e s t < 0 ) V c o r r = V e s t − 2 V m a x , i f ( V e s t > 0 ) \left\{\begin{matrix}V_{corr}=V_{est}+2V_{max},if(V_{est}<0) \\ V_{corr}=V_{est}-2V_{max},if(V_{est}>0) \end{matrix}\right. { Vcorr=Vest+2Vmax,if(Vest<0)Vcorr=Vest−2Vmax,if(Vest>0) - 如果最大值在set0中出现,不进行速度扩展
V c o r r = V e s t V_{corr}=V_{est} Vcorr=Vest
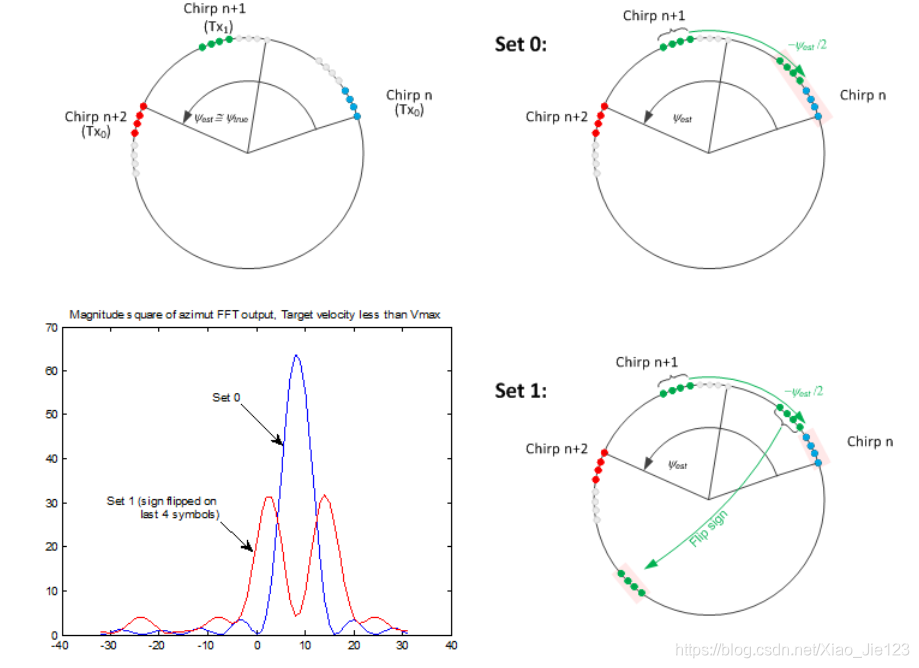
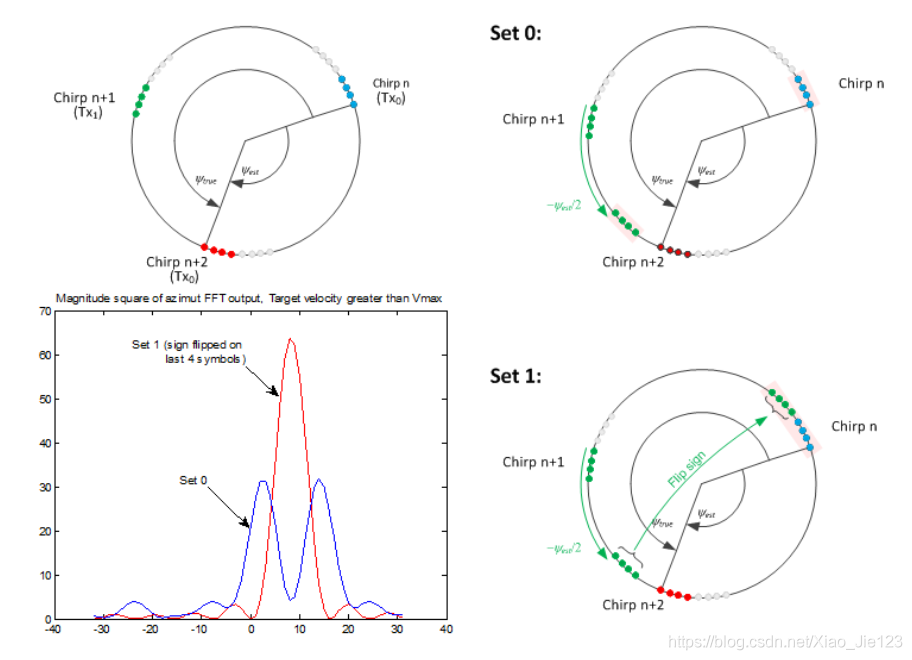
下面两个图分别是在 V r < V m a x V_r<V_{max} Vr<Vmax和 V r > V m a x V_r>V_{max} Vr>Vmax情况下,set0和set1中FFT峰值的情况
- V < V m a x V<V_{max} V<Vmax
- V > V m a x V>V_{max} V>Vmax
参考文献:
- 《AWR1642汽车雷达的速度扩展算法研究》