雷达信号和调制波形如下图所示:

第一个是固定载频矩阵脉冲,第二个是线性调频脉冲,第三个是相位编码脉冲
固定载频和线性调频这两种类型的脉冲很常见
本篇文章主要是配置相位编码脉冲
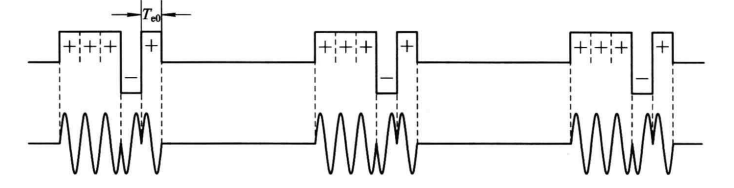
当+时初始相位为0deg,当-时初始相位为180deg。
配置相位脉冲主要是在mmwave studio种的BPMConfig,如下图

配置这些参数对应LUA脚本的函数为:

当BPM Val值设置为0时,起始相位为0deg,当BPM Val值设置为1时,起始相位设置为180deg
在配置BPM-MIMO的时候,起始相位为0时,相当于每个chirp乘以1,起始相位为180时,相当于每个chirp乘以-1
下面通过检测不同配置的回波信号来进行验证
实验场景:

通过两次设置不同的BPM Val值来设置不同的初始相位

可以看出两次的相位角差值为180deg左右
结论
可以通过设置不同BPM的值来设置信号的不同的初始相位