本篇文章主要介绍毫米波雷达的基础知识中的角度估计,对于本篇文章主要回答5个问题
1.在雷达的前方,如何估计前方一个物体的角度
2.角度测量的准确性
3.如何测量多个物体的角度
4.雷达可测的角度的视场最大值为多少
5.角度分辨率取决于什么因素
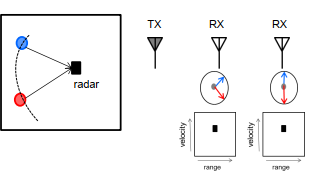
估计雷达前面一个物体的角度
估计一个物体的角度,最少需要两根接收天线
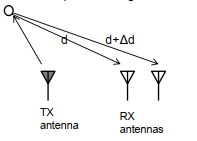
发射天线发送一个chirp,经过物体发射后信号,信号分别被第一根天线和第二根天线接收,第一根天线接收的距离为 d d d,第二根天线接收的距离为 d + Δ d d+\Delta d d+Δd,额外的距离会产生相位差, ω = 2 π Δ d λ \omega = \frac{2\pi \Delta d}{\lambda} ω=λ2πΔd
假设两根天线接收回来的信号是平行的,如下图:
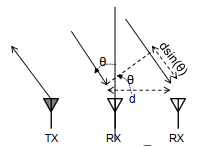
则 Δ d = d s i n ( θ ) \Delta d = dsin(\theta) Δd=dsin(θ),则公式 ω = 2 π Δ d λ = 2 π d s i n ( θ ) λ ⇒ θ = s i n − 1 ( λ ω 2 π d ) \omega = \frac{2\pi \Delta d}{\lambda} = \frac{2\pi dsin(\theta)}{\lambda} \Rightarrow \theta=sin^{-1}(\frac{\lambda \omega}{2\pi d}) ω=λ2πΔd=λ2πdsin(θ)⇒θ=sin−1(2πdλω)
角度测量的准确性
测量角度的公式为: ω = 2 π d s i n ( θ ) λ \omega = \frac{2\pi dsin(\theta)}{\lambda} ω=λ2πdsin(θ),在 ω \omega ω和 θ \theta θ之间的关系不是线性的
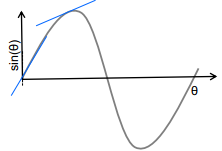
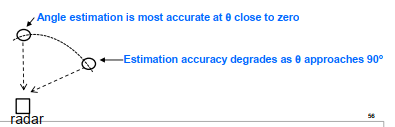
在这个图中,当 θ \theta θ趋近于0时, s i n ( θ ) sin(\theta) sin(θ)对 θ \theta θ的变化是非常敏感的, θ \theta θ的微小变化可能会导致 s i n ( θ ) sin(\theta) sin(θ)的同等大小的变化,但是 s i n ( θ ) sin(\theta) sin(θ)的敏感性会随 θ \theta θ的增大的敏感性减小,当 θ \theta θ接近于 90 ° 90\degree 90°时, s i n ( θ ) sin(\theta) sin(θ)对 θ \theta θ的变化是变得非常不敏感,因此随着 θ \theta θ角度的增加,角度的估算就会更容易产生误差
总结:
ω \omega ω对 θ \theta θ灵敏度随着 θ \theta θ的增大而减小( θ \theta θ从0到90度)
雷达的最大角视场

物体在雷达的左边,向量逆时针转

物体在雷达的右边,向量顺时针转

当向量转的角度超过180度时,就会产生模糊,不知道物体是在雷达的左侧还是在雷达的右侧
因此,角度的最大无模糊为: ∣ ω ∣ < 180 ° |\omega|<180\degree ∣ω∣<180°
2 π d s i n ( θ ) λ < π ⇒ θ < s i n − 1 ( λ 2 d ) \frac{2\pi dsin(\theta)}{\lambda} <\pi \Rightarrow \theta<sin^{-1}(\frac{\lambda}{2 d}) λ2πdsin(θ)<π⇒θ<sin−1(2dλ)
因此雷达的最大角视场可能为 − + 90 ° ^+_-90\degree −+90°
测量雷达前方多个距离和速度相同的物体
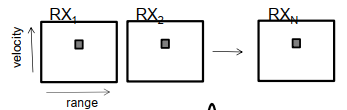
加入雷达前方有两个物体,他们的距离和速度相同,这样两个物体将处于2D-FFT中相同位置的距离速度单元,如下图所示:
之间简单的相位比较就不再适用
解决方案是:将RX天线的数量从两个增加到N个
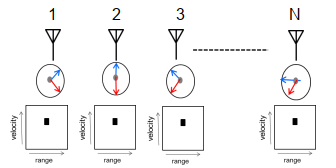
经过FFT(angle-FFT)后,得到下图:
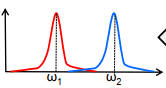
则:
θ 1 = s i n − 1 ( λ ω 1 2 π d ) \theta_1=sin^{-1}(\frac{\lambda \omega_1}{2 \pi d}) θ1=sin−1(2πdλω1)和 θ 2 = s i n − 1 ( λ ω 2 2 π d ) \theta_2=sin^{-1}(\frac{\lambda \omega_2}{2 \pi d}) θ2=sin−1(2πdλω2)
ω 1 \omega_1 ω1和 ω 2 \omega_2 ω2分别对应于两个物体之间的接收天线的相位差
得到结果是弧度,最后还应该乘以180度,得到角度
角度分辨率
角度分辨率( θ r e s \theta_{res} θres)是两个物体在ange-FFT中作为单独峰值出现的最小角度的问题
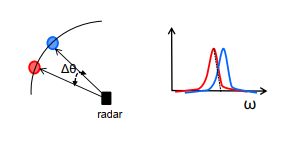
Δ ω = 2 π d λ ( s i n ( θ + Δ θ ) − s i n ( θ ) ) = 2 π d λ c o s ( θ ) Δ θ \Delta \omega = \frac{2\pi d}{\lambda}(sin(\theta + \Delta \theta)-sin(\theta))=\frac{2\pi d}{\lambda}cos(\theta)\Delta\theta Δω=λ2πd(sin(θ+Δθ)−sin(θ))=λ2πdcos(θ)Δθ,因为 s i n ( θ + Δ θ ) − s i n ( θ ) Δ θ = c o s ( θ ) \frac{sin(\theta + \Delta \theta)-sin(\theta)}{\Delta \theta}=cos(\theta) Δθsin(θ+Δθ)−sin(θ)=cos(θ),这是利用导数的概念
又因为: Δ ω > 2 π N \Delta \omega > \frac{2\pi}{N} Δω>N2π
推出 2 π d λ c o s ( θ ) Δ θ > 2 π N ⇒ Δ θ > λ N d c o s ( θ ) \frac{2\pi d}{\lambda}cos(\theta)\Delta\theta>\frac{2\pi}{N} \Rightarrow \Delta \theta>\frac{\lambda}{Ndcos(\theta)} λ2πdcos(θ)Δθ>N2π⇒Δθ>Ndcos(θ)λ
因此角度分辨率为 θ r e s = λ N d c o s ( θ ) \theta_{res}=\frac{\lambda}{Ndcos(\theta)} θres=Ndcos(θ)λ
d d d为接收天线之间的距离,一般情况为 d = λ 2 d=\frac{\lambda}{2} d=2λ, θ \theta θ的值一般取0,则 θ r e s = 2 N \theta_{res}=\frac{2}{N} θres=N2
角度估计的流程
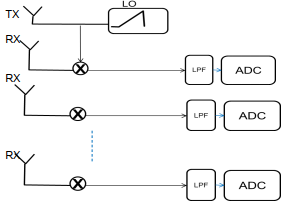
对每一个接收天线接收到的数据做2D-FFT,如下图:
对天线上的峰值做FFT来估计角度值
参考文献:
- 《mmwaveSensing-FMCW-offlineviewing》