点云研究是现在非常热门的领域,尤其是在无人驾驶方面,有非常广阔的应用前景。
点云压缩是点云处理的一个方面的技术,目前研究方向主要分为深度学习和传统方法。传统方法主要是用到PCL等点云处理库,或者如GPCC、VPCC等标准方法,深度学习是近几年随着深度学习的发展而流行起来的方法,主要集中在高校学术领域,包括有损压缩和无损压缩。有损压缩方面的论文比较多,如PCGCv1、PCGCv2、pcc_geo_cnn-v1等,无损压缩则以voxeldnn为代表。
对于大部分的研究者而言,点云方面的研究存在很多困难,尤其是小白,比如论文下载要收费,英文论文看不懂,算法程序看不懂,不知道哪些论文是比较经典的,不同算法之间怎么衡量性能指标,算法的真实水平如何,数据集不好下载,没有好的GPU来训练和测试……
本系列就是为了解决上述研究者的痛点而生,通过在点云深度压缩领域,研究目前发表的质量比较高的论文,并进行论文和代码的分析、解读,针对使用者的不同深度学习框架的需求,提供不同框架下的深度学习程序,如TensorFlow、pytorch、tensorlayer等,并提供论文和源码,训练好的模型,性能评估结果、数据集等,帮你快速入门。最重要的是,这里可以提供高性能的GPU资源,免费!
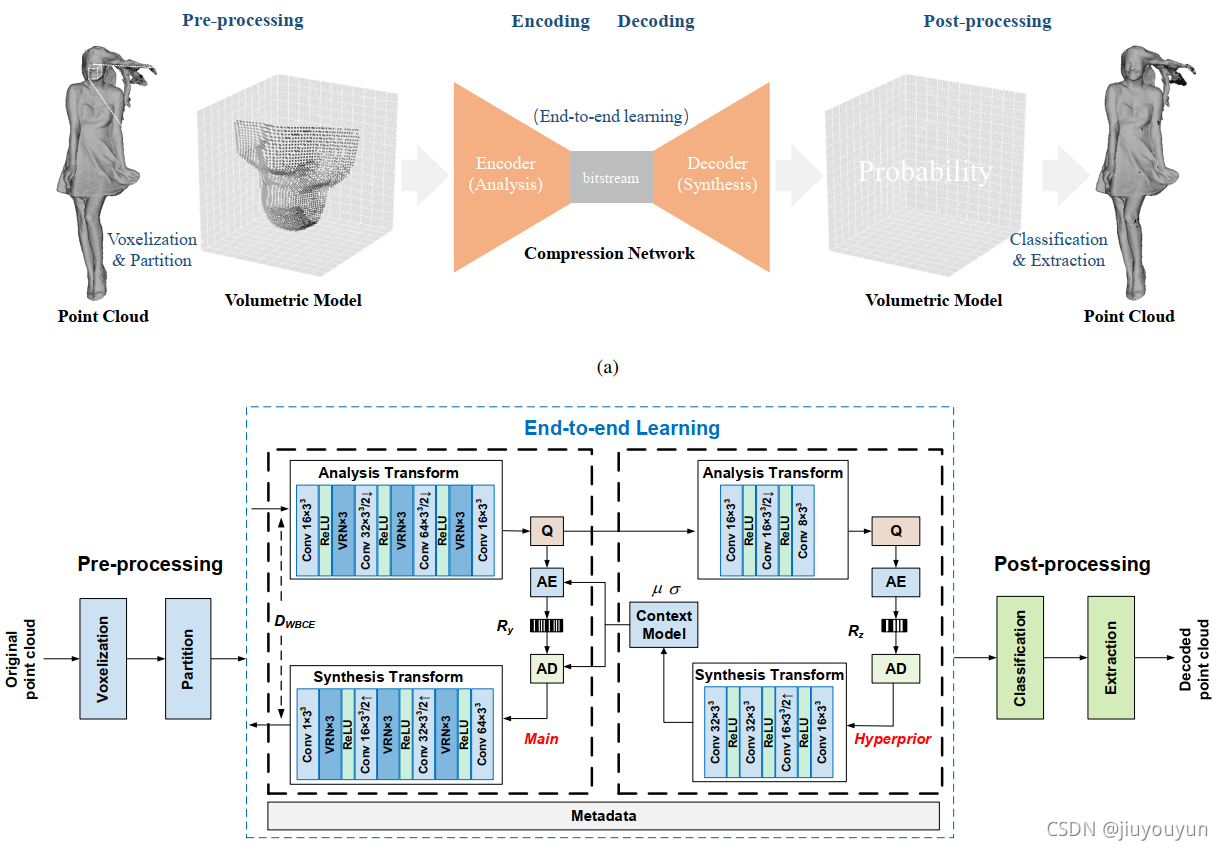
第一个算法是PCGCv1,论文题目是《Lossy Point Cloud Geometry Compression via End-to-End Learning》,作者为南京大学王剑强等人,论文提出了一种针对点云的基于深度学习的压缩方法,包括encode与decode部分。论文的创新点主要有3个方面:(1)Analysis和Synthesis的网络结构设计,引入VRN*3模块,能在encode/decode时有效提取点云特征;(2)采用hyper网络,对每个要编码的y的位置,用hyper网络输出的m、 s构建正态分布,模拟其概率密度,这样得到的cdf能更贴近y的真实,得到的算术编码后的ystring更小;(3)网络输入方面,将点云分割成固定大小的block,再将每个block转成voxel,作为神经网络的输入,block之间没有关联,可以并行处理,加快处理速度。
具体的代码和详细说明,见:
免费GPU云脑资源,见: OpenI 。启智社区是鹏城实验室推出的开源算法社区,这里会提供很多开源算法和免费GPU资源,具体使用看看官网的说明,有问题可以在官网提问,会有漂亮小姐姐解答的。
关于作者
### Authors
These files are provided by Nanjing University [Vision Lab](http://vision.nju.edu.cn/). And thanks for the help from SJTU Cooperative Medianet Innovation Center. Please contact us ([email protected]) if you have any questions.