目录 Catalogue
转基因干饭迷宫老鼠
问题描述
相信大家应该很熟悉迷宫老鼠问题,也一定有相当多部分的人能够熟练地使用BFS求解迷宫老鼠的最短路径问题,那么,如果现在,我们对迷宫老鼠问题进行适当的强化,你是否还能熟练的求解这个问题:
问题1:
在传统迷宫老鼠问题的基础上,思考一下问题:转基因超级干饭老鼠可以在迷宫中斜着走,但是横向移动一下你需要喂它10斤饭,斜着走一下你需要喂它14斤饭(因为距离变成了根号2),你能输出这个超级迷宫老鼠干饭最少的路径和干饭吗?
问题2:
在问题1的基础上,如果迷宫里存在“水域”,“高地”等不同地形,老鼠分别需要消耗15,20斤饭才能移动一个地形,那么,又该如何求解这个问题?
问题分析
首先,你可能认为写出这个题目的人多多少少沾点儿脑瘫,但是,问题也并非空穴来风,这种行为其实是在游戏中非常常用的行为。试想在一个RTS或MOBA游戏中,游戏的地形很少有完全平坦的陆地。大多数情况下,游戏中不仅存在或多或少的障碍物,穿过不同的地形往往也意味着不同的代价。事实上,游戏中的寻路方法远远比我们接下来要讨论的算法复杂许多。
我不可以用BFS,DFS或者Dijkstra 算法吗?
不可以。
首先我们来探讨BFS:BFS是一个相当常用的算法,这个算法被广泛的应用在寻路,遍历图,求最短路径等多种图论算法中。他的核心思想是平等的探索起始点的各个方向。对于普通的迷宫问题而言,这种算法是求解最短路的优秀方法,然而,由于它平等探索的特性,决定了BFS无法在这种带有权值的问题中使用。
其次,我们来考察DFS算法:在本人的经验中,首先很少见到有人使用DFS来求解最短路径问题,不过DFS确实可以用来求最短路径。它面临的问题和BFS相同:DFS总是平等的对待所有的点,在这个问题中,图中每个节点却拥有不同的权值,因此,DFS算法并不适用这个问题。
最后,让我们观察Dijkstra算法,Dijkstra算法可以用来解决带有权值的问题。但是,Dijkstra算法的扩张方式是从启示点开始向四周扩张的,这对于程序的速度而言并不是一件好事,而游戏算法往往对速度具有极高的要求。
因此,我们应该考虑的最好算法,应该是既能考虑遍历方向应该是优先选择向结束点靠近的,同时,又能处理移动代价的算法。
A*算法
A*算法是用来干什么的?
寻路的
尽管我们发现以上讨论的三种方法并不适用于解决这个问题,但是我们一直以来的努力并非全部木大。我们依然能参考使用Dijkstra算法与BFS的思维,提出新的思路。在实践中,A算法被认为是一种高效而可行的算法,在接下来的部分中,我们将尝试使用A算法来解决转基因干饭老鼠问题1
A*算法如何工作
试看这幅地图:
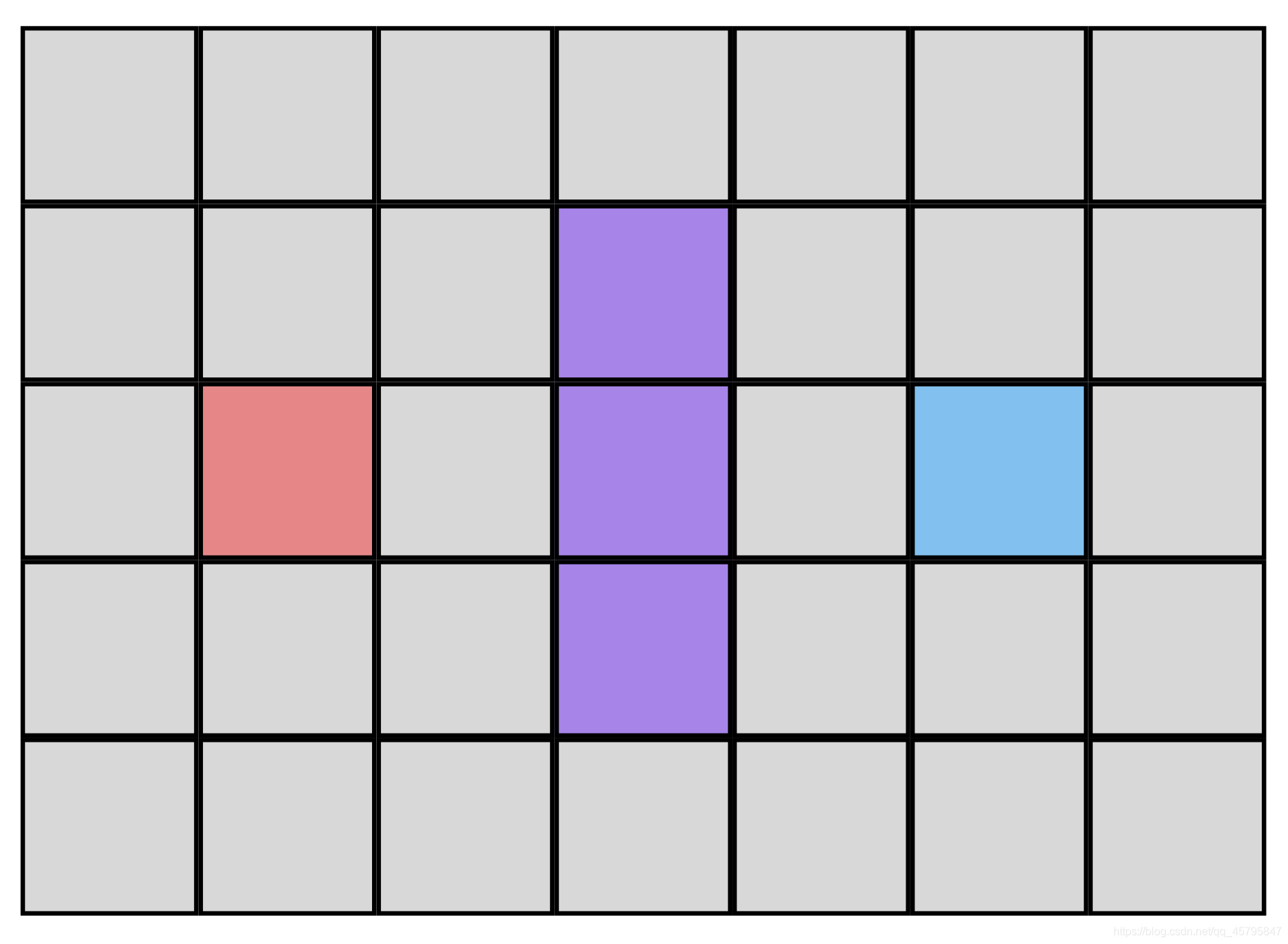
在这地图中,紫色地图块为障碍物,红色地图块为起点,蓝色地图块为结束点,其余地图块均为可到达区域,其他题设与问题1所描述的相同。
我们将以这幅地图为例介绍A*算法的使用方法,在此之前,我们需要明确我们将在此处使用的工具。
1.Open List:一个用于储存节点的数据结构,虽然他的名字叫Open List,但是使用线性表的等其他数据结构也可以。
2.Closed List:同Open List,一个用于储存节点的数据结构,使用链表,线性表等常见数据结构均可。
3.每个节点具有三个数值:
F: 满足 F = G + H。
G: 从起点开始,到指定格子的距离。
H: 从起点开始,到达这个格子的预计距离。
4.每个节点还应该具有一个父亲,你可以使用一个指向节点的指针表示,也可以使用简单的记录父亲坐标的方法表示。
看到这里估计大家并不知道这四个工具如何使用,没关系,我们开始搜索,边说边用:
开始工作!
0.输入各点的坐标,绘制地图,置空你的OpenList与ClosedList
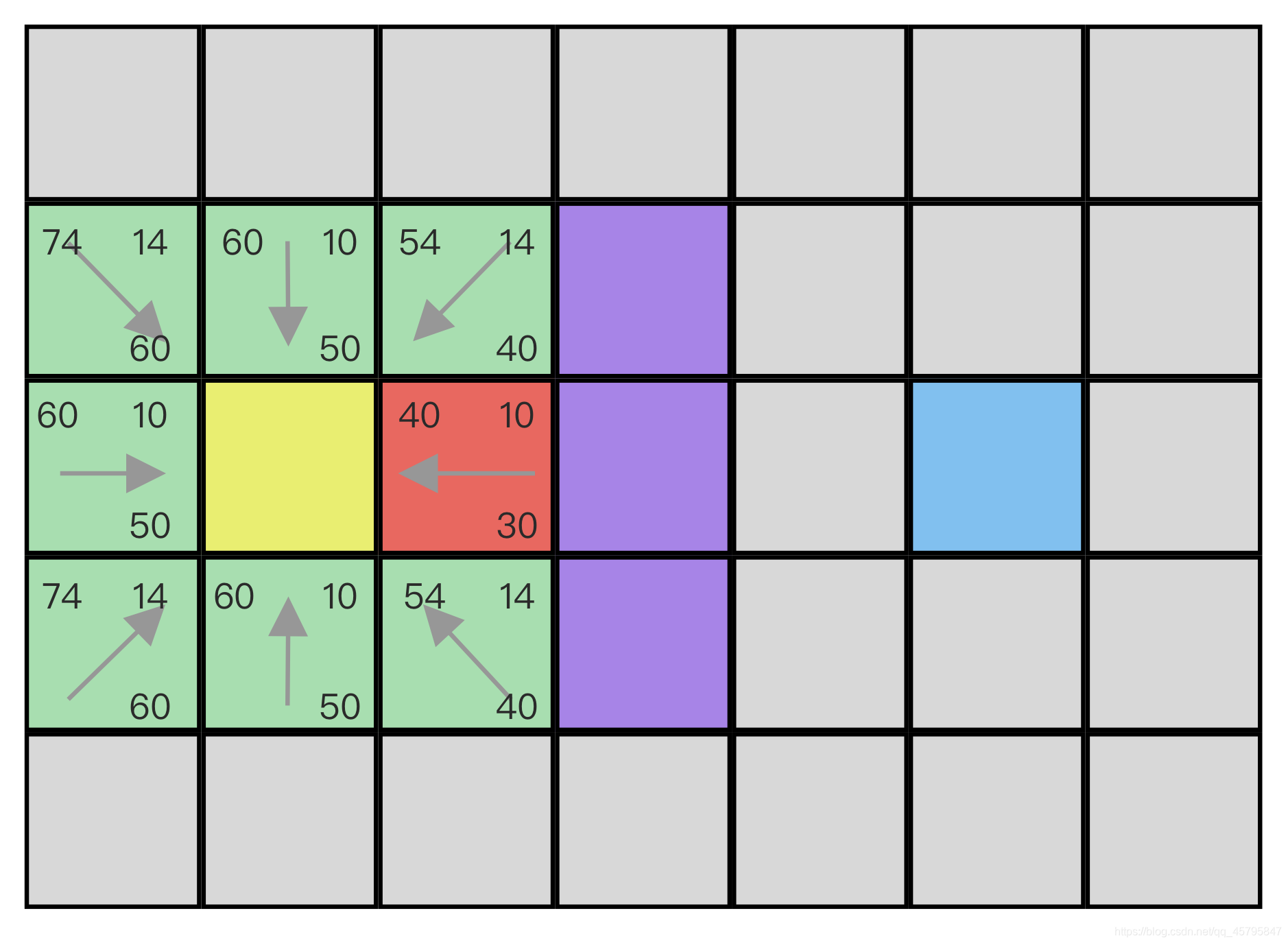
1.第一步,从起点A开始,标记所有A周围的可以到达的点,并将他们全部加入OpenList,当然,这些点不可以本来就在OpenList或者ClosedList中。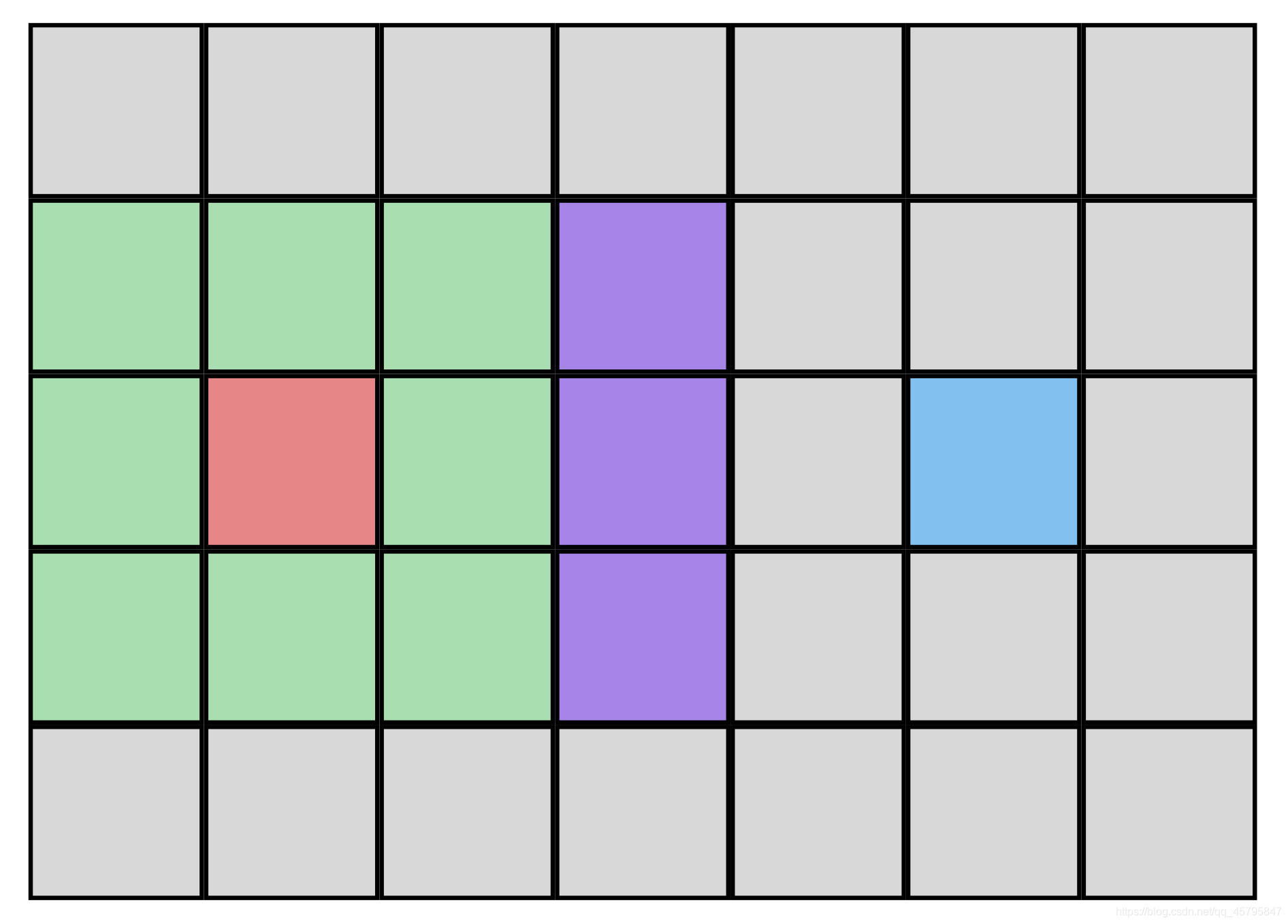
如图所示,所有绿色色块代表他们被加入了OpenList。
2.我们为所有的点都设置父亲,在这里,他们的父亲就是起始点,标记完父亲之后的图应该是这个样子的: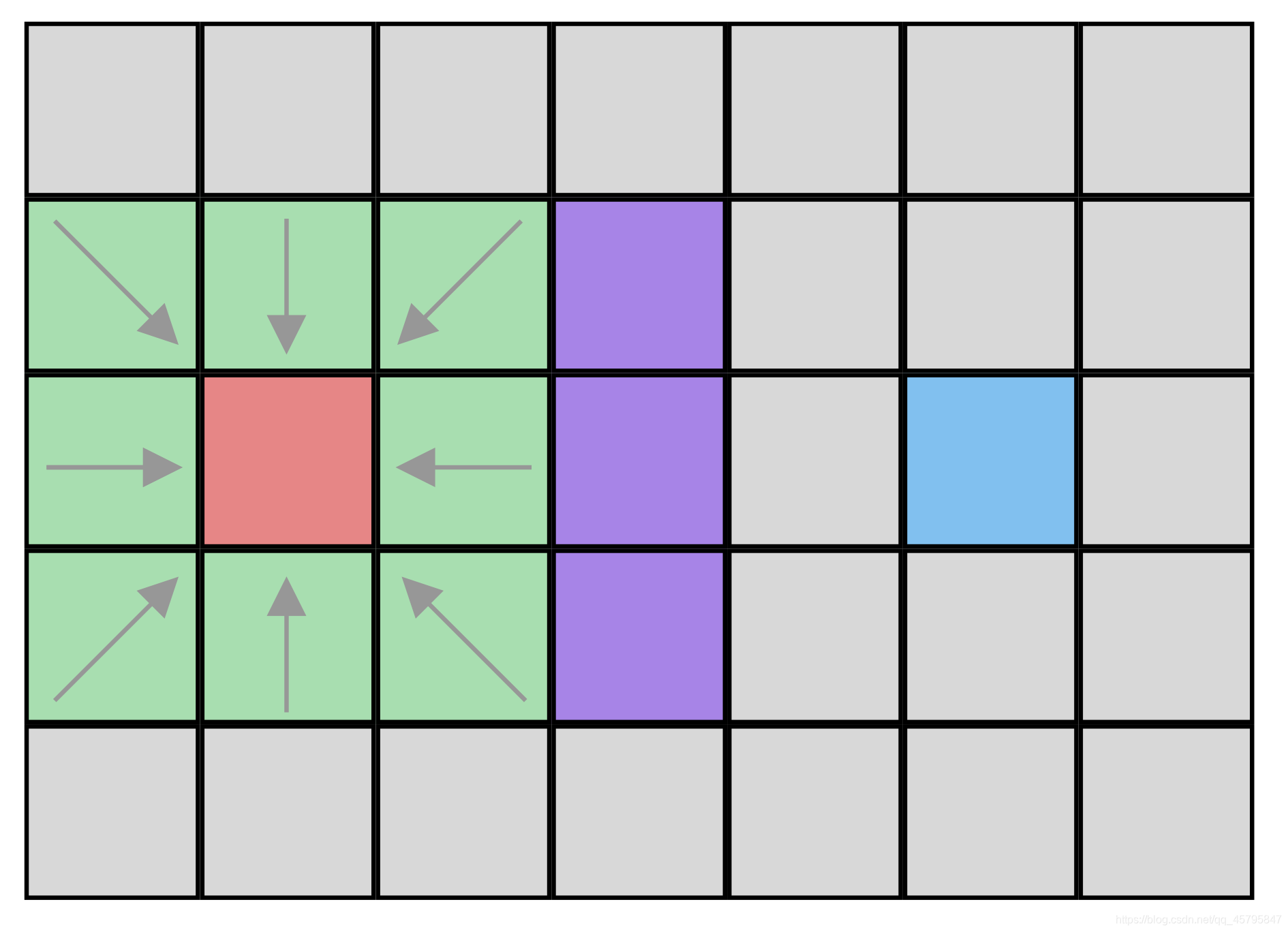
这一步是很有必要的,因为我们需要能够追踪这些点的父亲,来寻找这个路径。我们稍后将看到这个点所发挥的巨大作用。
3.下一步,我们需要选出一个点来,把这个点作为选中点,并把A加入到ClosedList中,不过,这里我们遇到了A*算法的一个关键问题:
我应该选择哪个点?
答案是:F值最小的那个,那么如何求F值呢?
如何求F值
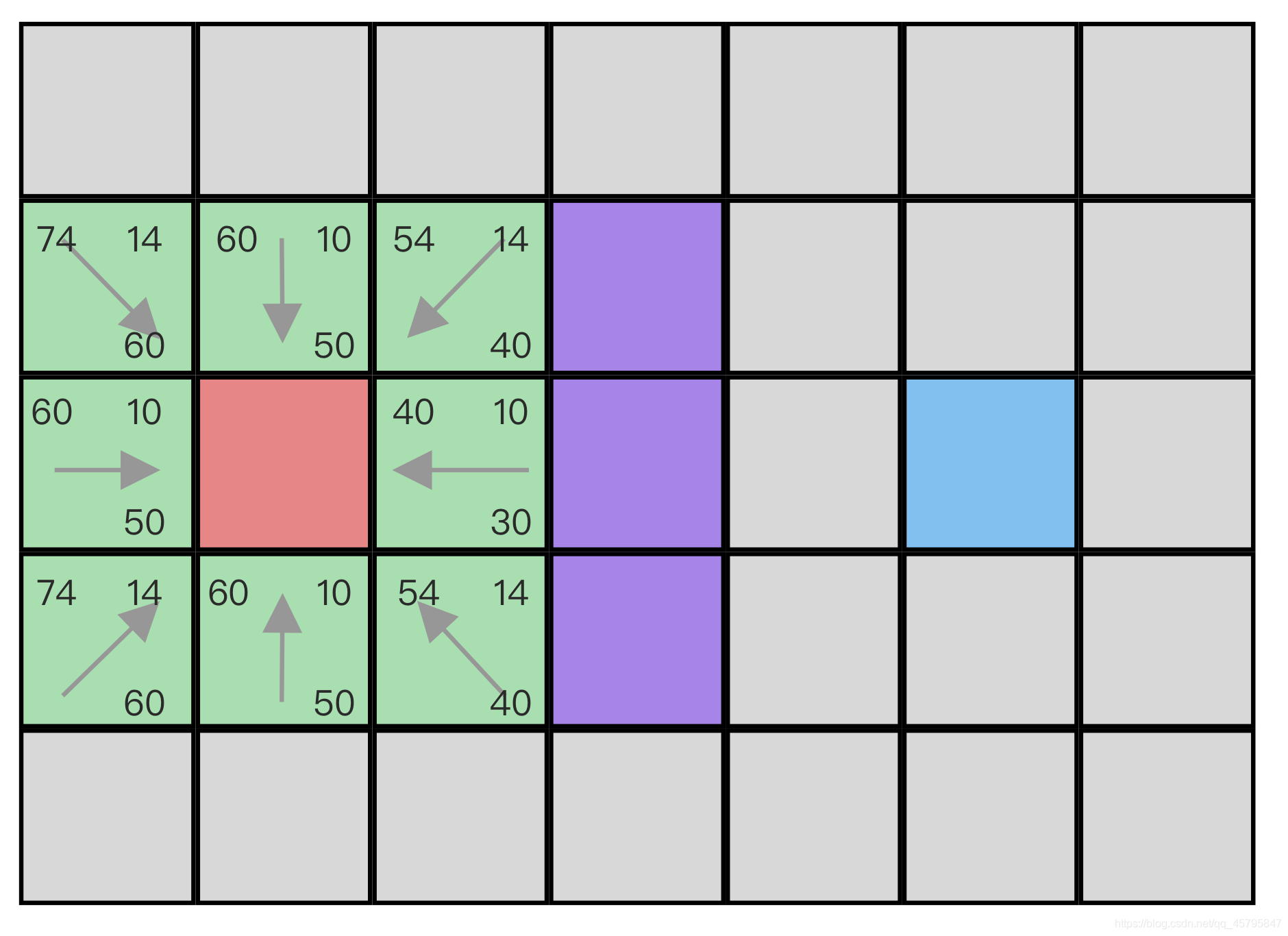
F = G + H !求F的过程就是一个求G和H的过程,我们首先来探讨简单的G
G怎么求?
G非常容易理解,他就是从A点开始到周围点的移动代价,我们在题设中已经说了,横向移动为10,斜向移动为14,很容易求起始点周围的个点的移动代价。注意:是到A的!不是到当前选中点的,在一轮循环中,应该等于 当前点的移动代价 + 10 或 当前点的移动代价 +14 ,并且这个值并不是对于一个点来说永远不变的,我们接下来将看到。
H怎么求
求H的方法是非常多变的,这里我们使用 Manhattan 方法,这个方法允许我们去估算当前点到终止点的距离,我们不妨设终止点的坐标分别为:
end_point_x与end_point_y,设当前点的坐标为current_point_x与current_point_y。在不同的地图中,用来计算H的公式并不是相同的,在这个地图中,这个公式是一种好方法:
H = abs(end_point_x - current_point_x) * 10 + abs(end_point_y - current_point_y) * 10;
这个距离是忽略代价与障碍的,因此,非常便于使用。
这只是一个估计值,并不是实际的距离。
在完成了以上的操作之后,我们就可以求得各个点的F值,我将他们的值全部标记在了地图上。
回到工作!
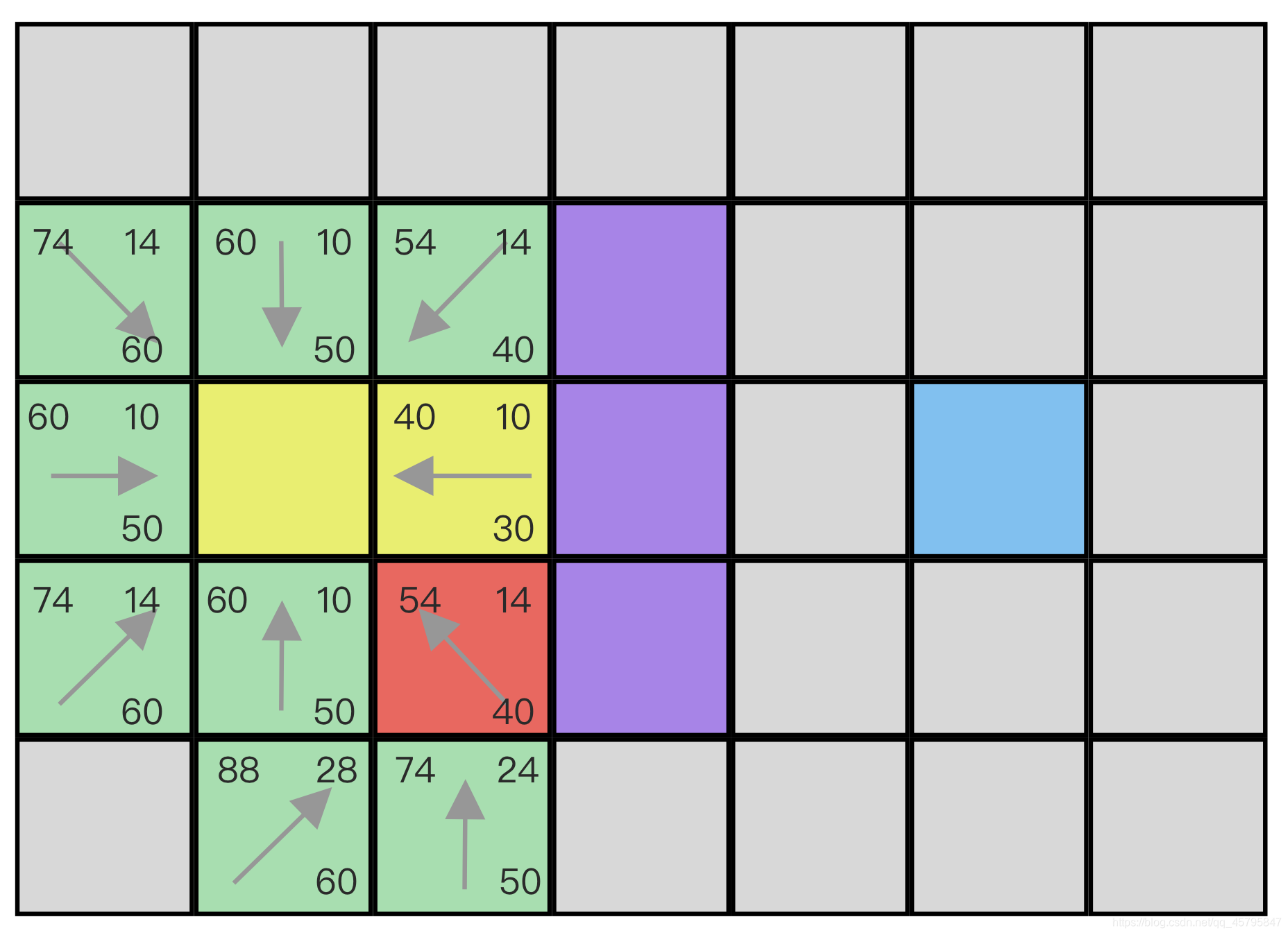
现在,我们已经求得了所有A邻近的点的F值,按照我们刚才所述,将A加入Closed List,在途中,我用黄色标记表示所有被加入Closed List的点,并且将最小F值得点标记为当前点,即current_point,我们使用红色点来将其标记:
现在,重复1,2,3,把选中点周围的点可到达的,不在OpenList的,不在ClosedList的点,全部加入Open List中,一般来说,不会更新各个点的父亲,但是,在求F,G,H这里一定要非常非常注意:如果通过当前点到达临界点的方式会造成一个更小的G值,那么,需要更新G,F,与父亲。我们在本轮循环中,这一点没有被使用,我们考察接下来的下一步循环结果:
注意!我们设定不可以逾越墙角!因此红色点的右下角不可以到达!实际上你可以删除这个设定,这里加入是为了方便讲解
看下一轮循环:
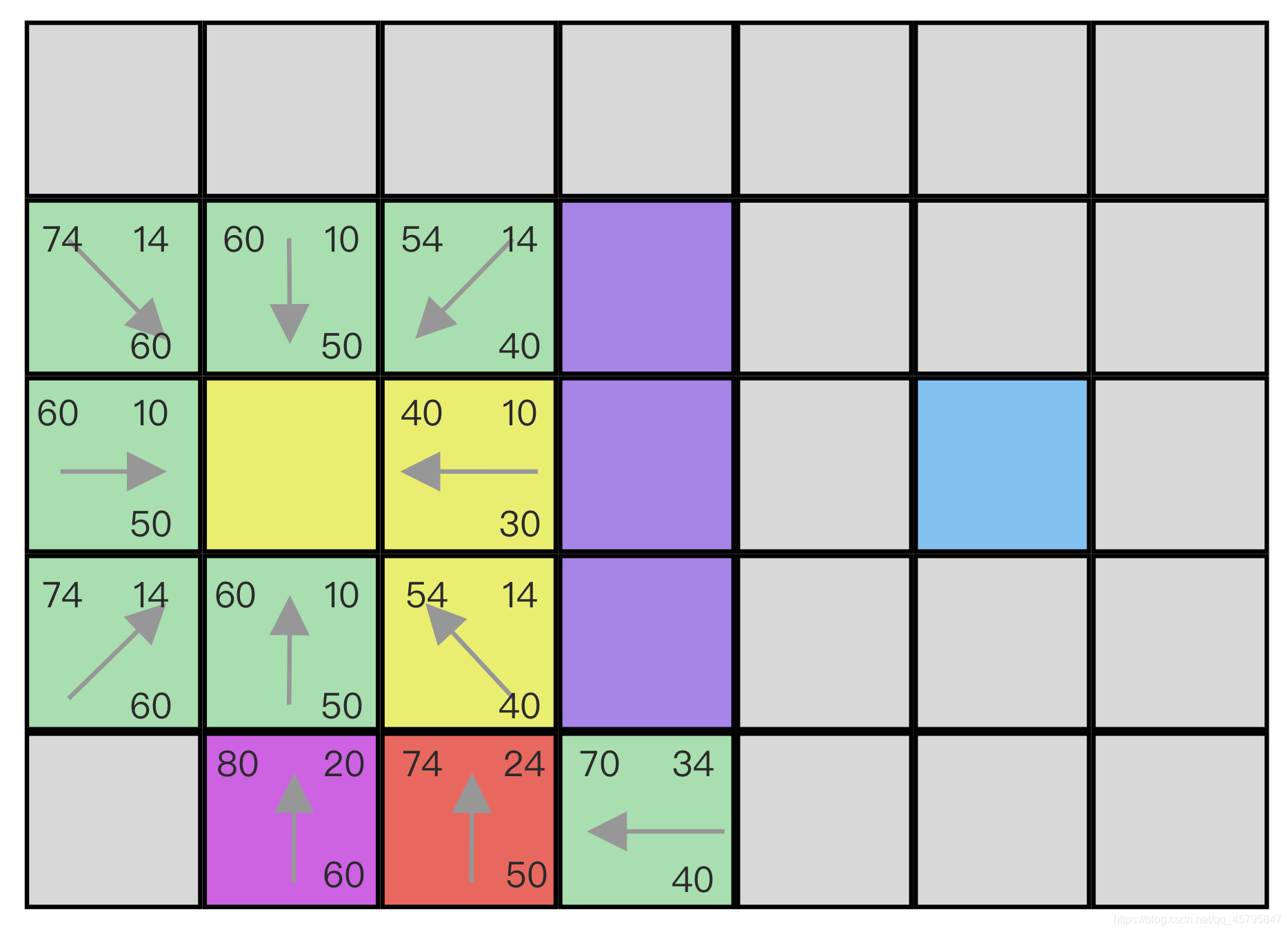
注意当前点左边这个点,他的G值被更新了,父母也被指向了它上面的格子,诸位可以试想一下,这件事情实际上在这个循环中发生了吗?很遗憾。没有。如果从当前的格子看,那么这个粉色的格子应该的G是24+10 = 34,要小于上一轮循环的得到的G,因此他的G,F,父母应该是没有被更新的。
那么为什么我要更新这个点?如果你选中粉色的格子的正上方那个点,那么这个点肯定就需要被更新,更新G,F与父母是A*算法中很重要的一点,但是我们选择的样例不太好,没有体现出来,在接下来的图中,这个点会被保持是没有更新的状态,请大家注意。
我们继续循环,直到结束点加入Open List,注意,请不要忘记我们不能逾越墙角的约定,此时图的状态应该是:
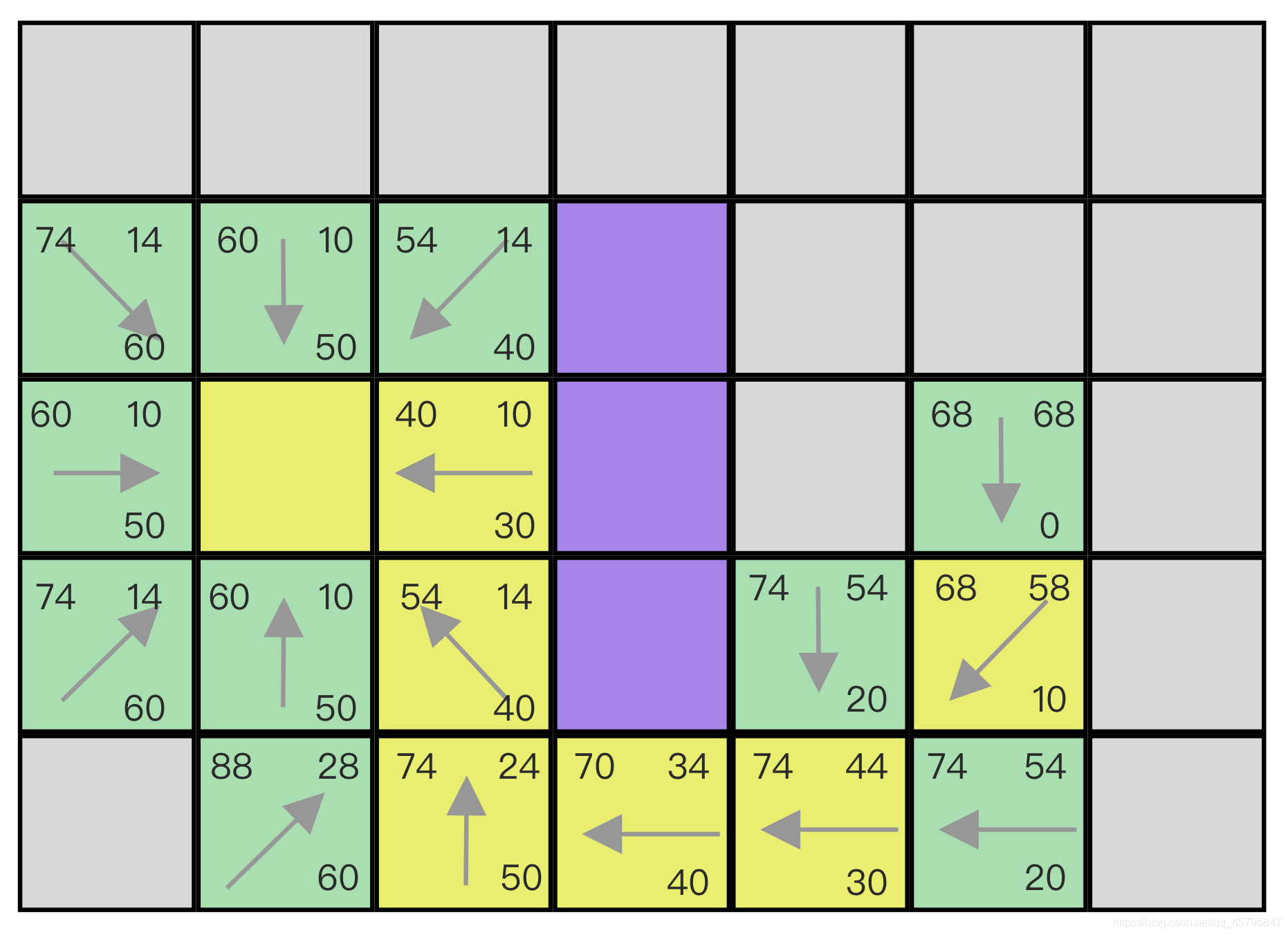
至此,结束点被加入Open List,顺着他的父亲,我们就可以找到最短路径,其G值就是最小的消耗值,我们把最短路径标记出来: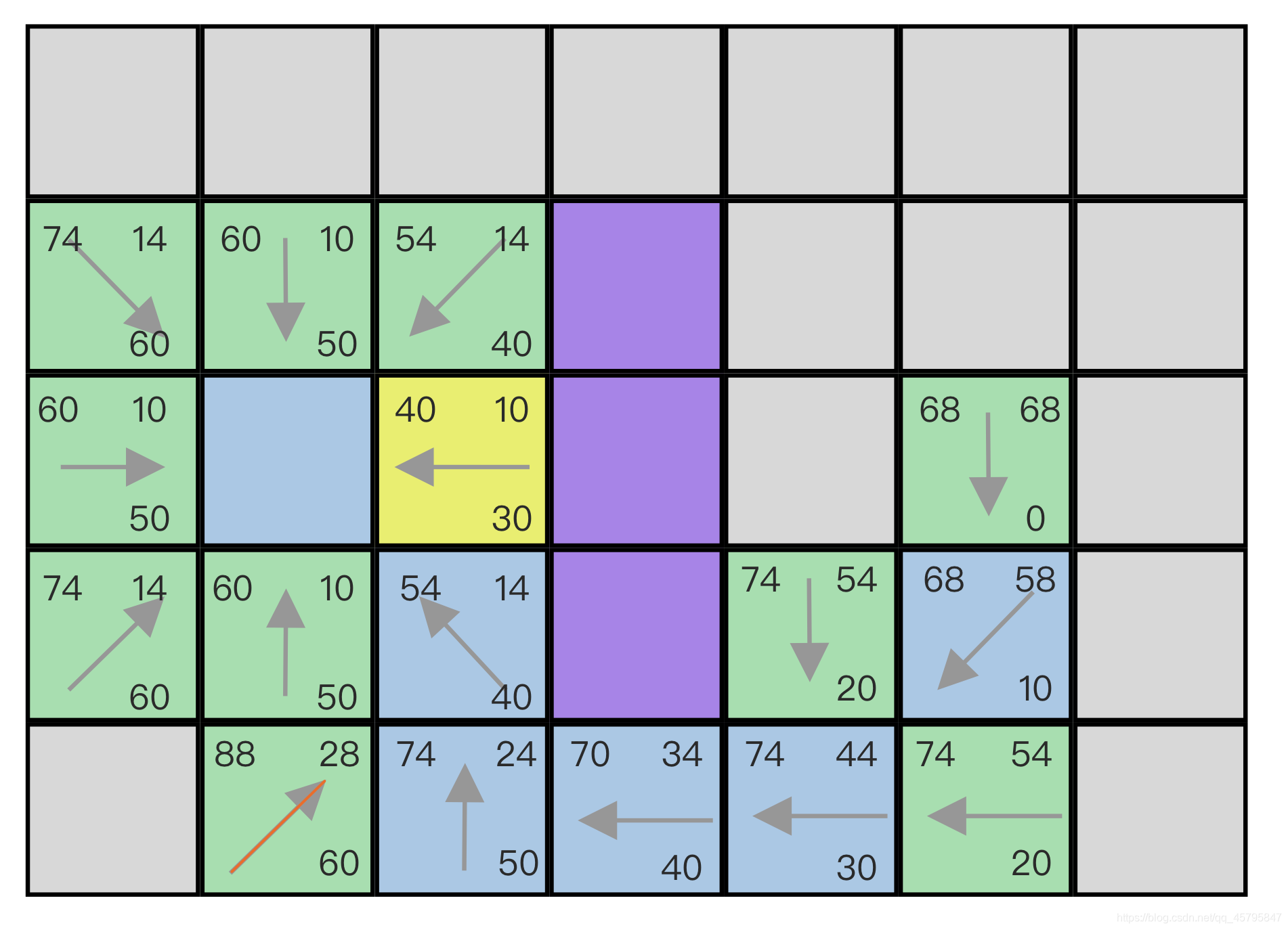
蓝色的路径即为最短路径!
代码实现(C++)
注意!以下代码在代码规范方面存在严重问题,语法组织不佳,且仅进行了部分小数据集验证,请谨慎使用!
注意!以下代码在代码规范方面存在严重问题,语法组织不佳,且仅进行了部分小数据集验证,请谨慎使用!
注意!以下代码在代码规范方面存在严重问题,语法组织不佳,且仅进行了部分小数据集验证,请谨慎使用!
(但是算法原理肯定是没问题的)
//
// main.cpp
// A*算法与迷宫干饭老鼠
//
// Created by 讨狐之猛将 on 2021/3/22.
//
#include <iostream>
#include <vector>
#include <list>
#include <cmath>
/*
转基因超级干饭老鼠可以在迷宫中斜着走,但是横向移动一下你需要喂它10斤饭,斜着走一下你需要喂它14斤饭(因为距离变成了根号2),你能输出这个超级迷宫老鼠干饭最少的路径和干饭吗?
测试地图见:
https://blog.csdn.net/hitwhylz/article/details/23089415
*/
using std::cin;
using std::cout;
using std::endl;
using std::vector;
using std::list;
struct node{
int parent_x;
int parent_y;
int x_;
int y_;
int G;
int F;
int H;
bool barrier;
node(int x=0, int y=0):x_(x),y_(y){
G = 0;
F = 0;
H = 0;
barrier = false;
parent_x = -1;
parent_y = -1;
}
};
int dx[] = {0,0,1,-1,1,-1,-1,1};
int dy[] = {1,-1,0,0,1,-1,1,-1};
int map_row;
int map_col;
vector<vector<node> >map;
vector<node> open_list;
vector<node> closed_list;
//判断相邻点是否在open_list
bool in_open_list(node n,int dx,int dy){
bool In_list = false;
for(vector<node>::iterator i = open_list.begin(); i!= open_list.end(); i++){
if(i->x_ == n.x_ + dx && i->y_ == n.y_ + dy)
In_list = true;
}
return In_list;
}
//判断相邻点是否可以加入open_list
bool Judge(node n,int dx,int dy){
bool In_list = false;
for(vector<node>::iterator i = open_list.begin(); i!= open_list.end(); i++){
if(i->x_ == n.x_ + dx && i->y_ == n.y_ + dy)
In_list = true;
}
for(vector<node>::iterator i = closed_list.begin(); i!= closed_list.end(); i++){
if(i->x_ == n.x_ + dx && i->y_ == n.y_ + dy)
In_list = true;
}
if(n.x_ + dx > 0 && n.y_ + dy > 0 && n.x_ + dx <= map_row && n.y_ + dy <=map_col && map[n.x_+dx][n.y_+dy].barrier == false && !In_list)
//超出地图边界的不可以,障碍物不可以
return true;
return false;
}
int main(int argc, const char * argv[]) {
//初始化地图信息
std::ios::sync_with_stdio(false);
int start_point_x;
int start_point_y;
int end_point_x;
int end_point_y;
int barrier_x,barrier_y;
cin>>map_row>>map_col;
cin>>start_point_x>>start_point_y;
cin>>end_point_x>>end_point_y;
for(int i = 0; i <= map_row; i++){
map.push_back(vector<node>(map_col+1));
}
for(int i = 1; i<=map_row; i++){
for(int j = 1; j<=map_col; j++){
map[i][j].x_ = i;
map[i][j].y_ = j;
}
}
while(cin>>barrier_x>>barrier_y){
if(barrier_x == -1 && barrier_y == -1)
break;
map[barrier_x][barrier_y].barrier = true;
}
//将起始点加入open_list
open_list.push_back(map[start_point_x][start_point_y]);
node& cc_node = map[start_point_x][start_point_y];
//计算起始点的H
map[cc_node.x_][cc_node.y_].H = abs(map[cc_node.x_][cc_node.y_].x_ - end_point_x) * 10 + abs(map[cc_node.y_][cc_node.y_].y_ - end_point_y) * 10;
while (true) {
for(int i = 0; i<8; i++){
int G_new;
if(Judge(cc_node, dx[i], dy[i])){
//设置不在open_list的点的父亲
if(!in_open_list(cc_node,dx[i],dy[i])){
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].parent_x = cc_node.x_;
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].parent_y = cc_node.y_;
//将符合要求的点加入open_list,如果不在open_list,设置他们的父亲
open_list.push_back(map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]]);
//如果end_point结束点被加入open_list,跳出循环,已找到最短路。
if(open_list.back().x_ == end_point_x && open_list.back().y_ == end_point_y)
break;
}
//计算这个点周围点的H
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].H = abs(map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].x_ - end_point_x) * 10 + abs(map[cc_node.y_ + dx[i]][cc_node.y_+dy[i]].y_ - end_point_y) * 10;
if(abs(dx[i]-dy[i])==1)//是一个上下左右移动
G_new = cc_node.G + 10;
else//是一个斜向移动
G_new = cc_node.G + 14;
//判断点是否之前加入过open_list,如果没有,更新G
if(map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].G == 0)
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].G = G_new;
else{
//之前该点的G已经被确定过,那么他在open_list中
if(in_open_list(cc_node,dx[i],dy[i]) && map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].G > G_new){//新G比老G小
//更新G
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].G = G_new;
//重设父亲
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].parent_x = cc_node.x_;
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].parent_y = cc_node.y_;
}
}
//一轮循环更新完G之后,计算点的F
map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].F = map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].G + map[cc_node.x_ + dx[i]][cc_node.y_+dy[i]].H;
}
}
//将该点放入closed list,移出open list;
open_list.erase(std::find_if(open_list.begin(), open_list.end(), [cc_node](node a){
return a.x_ == cc_node.x_ && a.y_ == cc_node.y_;
}));
closed_list.push_back(cc_node);
int n_x = open_list.front().x_;
int n_y = open_list.front().y_;
int current_smallest_F = map[n_x][n_y].F;
for(vector<node>::iterator i = open_list.begin(); i != open_list.end(); i++){
int round_F = map[i->x_][i->y_].F;
if(round_F < current_smallest_F){
current_smallest_F = round_F;
n_x = i->x_;
n_y = i->y_;
}
}
cc_node = map[n_x][n_y];
//如果end_point被加入了open_list 结束循环
if(open_list.back().x_ == end_point_x && open_list.back().y_ == end_point_y)
break;
}
node temp = map[end_point_x][end_point_y];
vector<std::pair<int, int> >ans;
ans.push_back(std::make_pair(end_point_x, end_point_x));
while (temp.parent_x != start_point_x || temp.parent_y != start_point_y) {
int next_x = temp.parent_x;
int next_y = temp.parent_y;
ans.push_back(std::make_pair(temp.parent_x, temp.parent_y));
temp = map[next_x][next_y];
}
ans.push_back(std::make_pair(start_point_x, start_point_y));
for(const auto& e : ans){
cout<<"("<<e.first<<" , "<<e.second<<")"<<endl;
}
return 0;
}
延伸讨论
我们讨论了A*算法的一种模式,然而,实际游戏中,往往会产生更多问题,包括但不限于:
1.如果我一次选中的多个单位,那么我们需要让每一个单位都寻路吗?你可能会说我们只需要求一个单位的即可,其他单位顺着求得的路径来,那么,如果两个单位相离较远呢?如果设置一个距离界限,让超过距离界限的两个单位独立寻路,那么,怎么设定这个界限呢?如果你选中的单位里有海军和陆军,寻找不同的路径呢?
2.游戏中的路径并不是固定的,如果一个不可逾越的单位占据了目标格子,或者另一个玩家在寻得的路径上建立了一个建筑物,得到的最短路径还可以使用吗?或者如果地图是动态的,一些容易低代价的格子会动态的变成高代价的,那么,能否将A*改造为一个动态算法?
3.你的地图往往是十分巨大的,在一张巨大的地图上,如果把它们划分成1x1的格子使用A算法是很费时的,那么,是不是距离很远的点我们可以先设置为大格子,距离接近时我们设置为小格子呢?我们如何改进A算法可以得到类似的效果。
4.如果你的地图不是方形的,而是六边形的,你如何使用A*算法来求得最短路径呢?你的算法能否适配不同不规则图形的地图?
5.你选择的路径是直来直去的,是否有一种方法,能把A*算法得到的路径换为平滑的路径,让单位的移动更加自然呢?你该如何改进你的算法?
希望这篇文章能够帮到你,如有错误,烦请联系作者。
以上,刍荛之见,伏候卓裁。
原文地址:https://link.csdn.net/?target=http%3A%2F%2Fwww.gamedev.net%2Freference%2Farticles%2Farticle2003.asp
参考:https://blog.csdn.net/hitwhylz/article/details/23089415