1.轨迹规划的定义
轨迹规划(trajectory planning)是运动规划(motion planning)研究的主要内容。运动规划指的是运动插补,在起始点和终止点之间插入中间点序列,实现沿着轨迹的平稳运动。运动控制包含路径规划(path planning)和轨迹规划,路径规划是规划位置,在起终点之间经过的路径点,轨迹规划是规划时间,将路径点与时间相对应。
对于我们的六轴机器人而言轨迹规划可以分为:关节空间轨迹规划和笛卡尔空间轨迹规划。关节空间轨迹规划是把机器人的关节变量变换成跟时间的函数,然后对角速度和角加速度进行约束。笛卡尔空间轨迹规划是把机器人末端在笛卡尔空间的位移、速度和加速度变换成跟时间的函数关系。
2.数学基础
三次多项式插值(适用于起点和终点速度为零的情况,约束关节在起点和终点的角度值,规定轨迹两端点位置角速度为定值)。
设关节角满足下式
将相邻两个点看作一小段轨迹的起点和终点分别用 和 表示,约束起始速度为 ,终止速度为
将约束条件代入函数,可以求得系数(为简便计算,设 )
三次多项式规划轨迹如下
当速度为零时适用于一段轨迹的起终点,不为零时适用于一段轨迹的经过点。
3.matlab代码实现
| 序号 | 位置 | 速度 | 时间 |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 2 | 100 | 0 | 3 |
clear;
clc;
q0=0;
q1=100; %指定起止位置
t0=0;
t1=3;%指定起止时间
v0=0;
v1=0;%指定起止速度
a0=q0;
a1=v0;
a2=(3/(t1)^2)*(q1-q0)-(1/t1)*(2*v0+v1);
a3=(2/(t1)^3)*(q0-q1)+(1/t1^2)*(v0+v1);%计算三次多项式系数
t=t0:0.01:t1;
q=a0+a1*t+a2*t.^2+a3*t.^3;%三次多项式插值的位置
v=a1+2*a2*t+3*a3*t.^2;%三次多项式插值的速度
a=2*a2+6*a3*t;%三次多项式插值的加速度
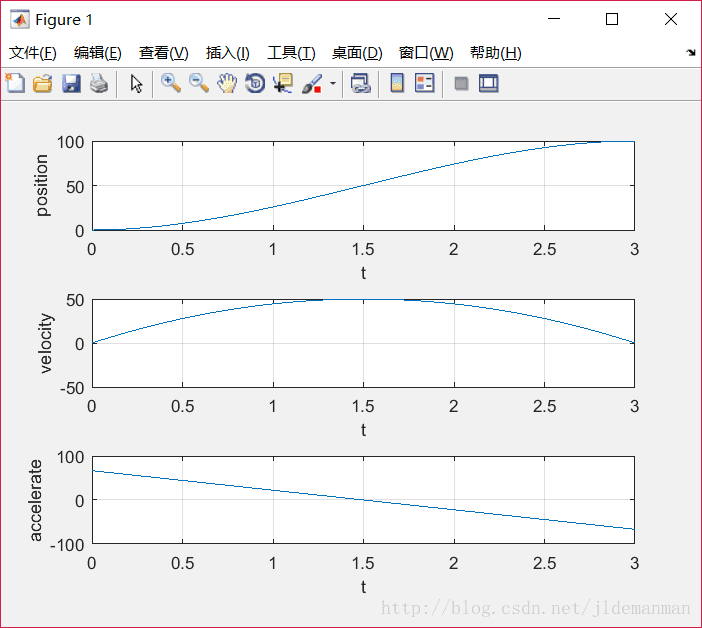
subplot(3,1,1),plot(t,q),xlabel('t'),ylabel('position');grid on;
subplot(3,1,2),plot(t,v),xlabel('t'),ylabel('velocity');grid on;
subplot(3,1,3),plot(t,a),xlabel('t'),ylabel('accelerate');grid on;下图为插值结果
4.含经过点的插值
| 序号 | 位置 | 速度 | 时间 |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 2 | 50 | 10 | 3 |
| 3 | 150 | 20 | 6 |
| 4 | 100 | -15 | 12 |
| 5 | 0 | 0 | 14 |
clear;
clc;
q_array=[0,50,150,100,0];%指定起止位置
t_array=[0,2,4,8,10];%指定起止时间
v_array=[0,10,20,-15,0];%指定起止速度
t=[t_array(1)];q=[q_array(1)];v=[v_array(1)];a=[0];%初始状态
for i=1:1:length(q_array)-1;%每一段规划的时间
a0=q_array(i);
a1=v_array(i);
a2=(3/(t_array(i+1)-t_array(i))^2)*(q_array(i+1)-q_array(i))-(1/(t_array(i+1)-t_array(i)))*(2*v_array(i)+v_array(i+1));
a3=(2/(t_array(i+1)-t_array(i))^3)*(q_array(i)-q_array(i+1))+(1/(t_array(i+1)-t_array(i))^2)*(v_array(i)+v_array(i+1));%计算三次多项式系数
ti=t_array(i)+0.001:0.001:t_array(i+1);
qi=a0+a1*(ti-t_array(i))+a2*(ti-t_array(i)).^2+a3*(ti-t_array(i)).^3;
vi=a1+2*a2*(ti-t_array(i))+3*a3*(ti-t_array(i)).^2;
ai=2*a2+6*a3*(ti-t_array(i));
t=[t,ti];q=[q,qi];v=[v,vi];a=[a,ai];
end
subplot(3,1,1),plot(t,q,'r'),xlabel('t'),ylabel('position');grid on;
subplot(3,1,2),plot(t,v,'b'),xlabel('t'),ylabel('velocity');grid on;
subplot(3,1,3),plot(t,a,'g'),xlabel('t'),ylabel('accelerate');grid on;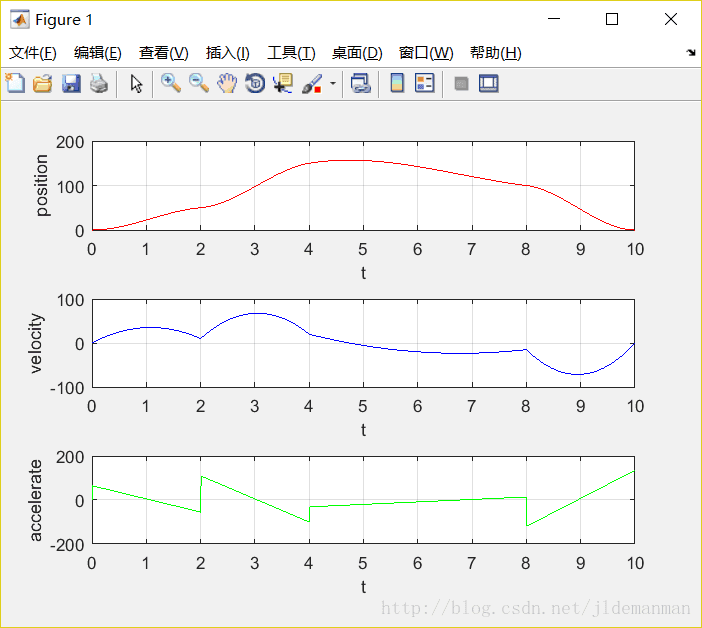
PS:这种三次多项式插值,只要给定离散点位置、速度和时间,就能插补出一段连续平滑的曲线。但是角加速度并不连续,下次为大家介绍高阶多项式插值则可以解决这个问题。