最近在学习SLAM,主要的学习资料为高翔的《视觉SLAM十四讲》,首先安利一下这本书,这本书由浅入的介绍了SLAM的整体结构,算法介绍与实际应用。可以说是一本既是通俗有趣的高科技讲义,又是一本足以指导研发实践的翔实教程。
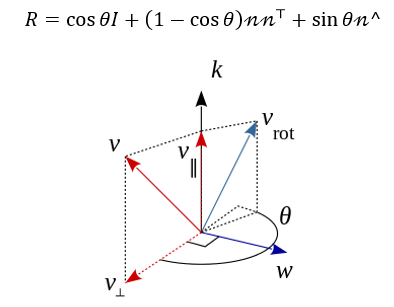
在书籍第三讲,关于三维空间刚体运动中,由于转动矩阵的数值计算较为复杂,所以提出了转动向量的概念,即转动向量的方向空间刚体转动的转动轴,向量的模代表着转动的的角度,代表轴的方向的单位向量,所以旋转矩阵R所对应的转动向量为。两者之间的关系为:

我们可以看到旋转轴向量可以通过
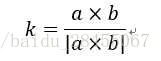
得到轴的单位向量。且:
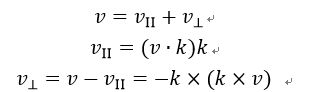
且垂直分量和平行分量各自的旋转分量为:

所以转动后的;将前面的各式代入可以得到:
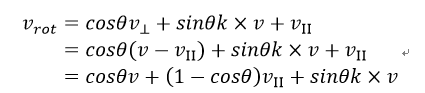
上述表达为矢量运算的表达式,对于矩阵运算,形式需要改变一下。首先就在线性变换中,可以采取一种反对称矩阵进行矩阵变换,其中为:
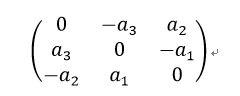

则:

所以:


则可以令,则由上式可以的到:

因此可以得到书中所得到的罗德里格斯转换公式了。
最近在学习SLAM,主要的学习资料为高翔的《视觉SLAM十四讲》,首先安利一下这本书,这本书由浅入的介绍了SLAM的整体结构,算法介绍与实际应用。可以说是一本既是通俗有趣的高科技讲义,又是一本足以指导研发实践的翔实教程。
在书籍第三讲,关于三维空间刚体运动中,由于转动矩阵的数值计算较为复杂,所以提出了转动向量的概念,即转动向量的方向空间刚体转动的转动轴,向量的模代表着转动的的角度,代表轴的方向的单位向量,所以旋转矩阵R所对应的转动向量为。两者之间的关系为:
我们可以看到旋转轴向量可以通过
得到轴的单位向量。且:
且垂直分量和平行分量各自的旋转分量为:
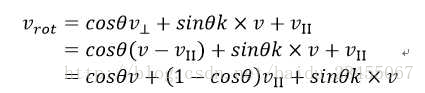
所以转动后的;将前面的各式代入可以得到:
上述表达为矢量运算的表达式,对于矩阵运算,形式需要改变一下。首先就在线性变换中,可以采取一种反对称矩阵进行矩阵变换,其中为:
则:
所以:
则可以令,则由上式可以的到:
因此可以得到书中所得到的罗德里格斯转换公式了。