写在前面
1、本文内容
罗德里格斯公式(Rodrigues’ Rotation Formula)推导
2、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/125984085
罗德里格斯公式
推导
先放这,有空来推一遍
几种表达方式
K K K是 k k k的叉乘矩阵,即 K = k ∧ \mathbf{K}=k^{\land} K=k∧,( k k k的叉乘矩阵也可表示为 k × k_{\times} k×)
1、
R = I + ( 1 − cos θ ) K 2 + ( sin θ ) K \mathbf{R}=\mathbf{I}+(1-\cos\theta)\mathbf{K}^2+(\sin\theta)\mathbf{K} R=I+(1−cosθ)K2+(sinθ)K
2、
由 K 2 = k ∧ k ∧ = k k T − I \mathbf{K}^2=k^{\land}k^{\land}=kk^T-\mathbf{I} K2=k∧k∧=kkT−I
可得
R = I + ( 1 − cos θ ) ( k k T − I ) + ( sin θ ) k ∧ = cos θ I + ( 1 − cos θ ) k k T + ( sin θ ) k ∧ \begin{aligned} \mathbf{R}&=\mathbf{I}+(1-\cos\theta)(kk^T-\mathbf{I})+(\sin\theta)k^{\land}\\ &=\cos\theta\mathbf{I}+(1-\cos\theta)kk^T+(\sin\theta)k^{\land} \end{aligned} R=I+(1−cosθ)(kkT−I)+(sinθ)k∧=cosθI+(1−cosθ)kkT+(sinθ)k∧
3、
高博的14讲中推导了指数映射
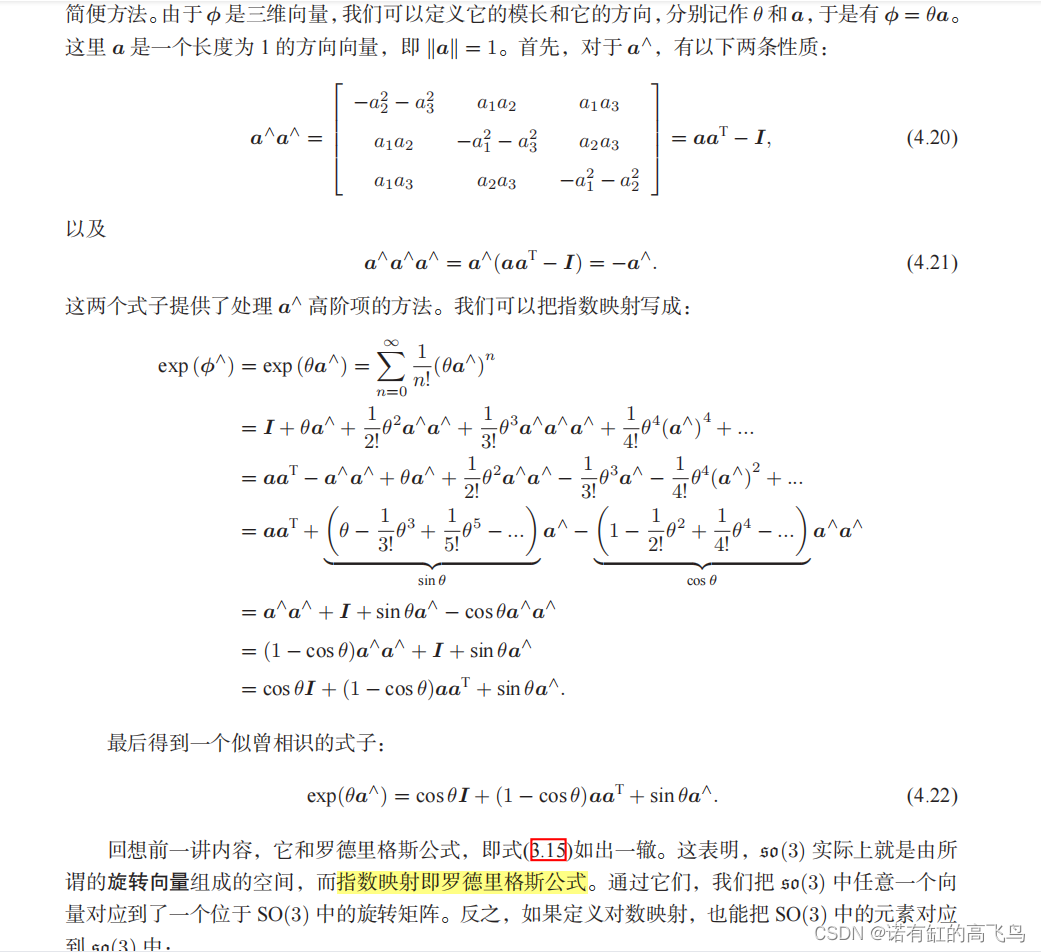
R = e x p ( θ k ∧ ) = cos θ I + ( 1 − cos θ ) k k T + ( sin θ ) k ∧ \mathbf{R}=exp(\theta k^{\land})=\cos\theta\mathbf{I}+(1-\cos\theta)kk^T+(\sin\theta)k^{\land} R=exp(θk∧)=cosθI+(1−cosθ)kkT+(sinθ)k∧
参考
https://en.wikipedia.org/wiki/Rodrigues’_rotation_formula
罗德里格斯公式(Rodrigues Formula) https://blog.csdn.net/weixin_40215443/article/details/123950141
二维xy坐标旋转 https://blog.csdn.net/qq_41102371/article/details/116245483#t4
完
如有错漏,敬请指正
--------------------------------------------------------------------------------------------202207