引言
前面我们了解了 复数在二维旋转中的作用与联系
而四元数与三维旋转之间的关系与复数对二维旋转有很多类似的地方,下面我们就先来详细了解一下三维旋转的过程。
三维旋转
首先讨论一下三维旋转,我们了解到常用的三维旋转有两种方式:
1)欧拉角
即按照一定的顺序,分别对X, Y, Z三个轴进行旋转 θ 角。绕各旋转轴的旋转矩阵为:
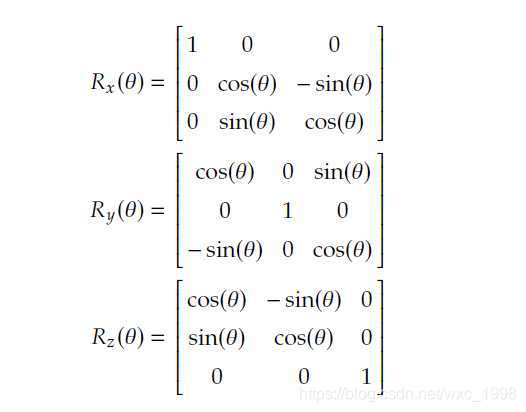
然后任意的三维旋转可以分解成上述三种旋转方式的组合。(注意:三个旋转的顺序是非常重要的,因为3D旋转矩阵的相乘一般是不可交换的,即
),而一般情况下,我们只会选择其中的一个固定的旋转顺序来进行处理,但是这种方式就会导致万向锁的问题。
2)轴角式
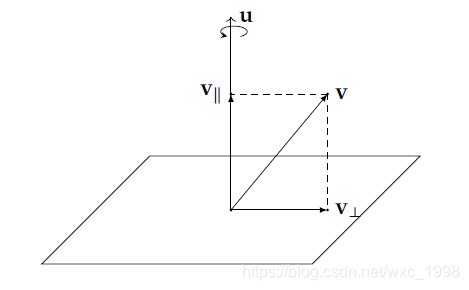
即按照一个固定方向为旋转轴,绕着此轴旋转 θ 角,如下图中所示,向量V绕着旋转轴u旋转了 θ 度变换到V’
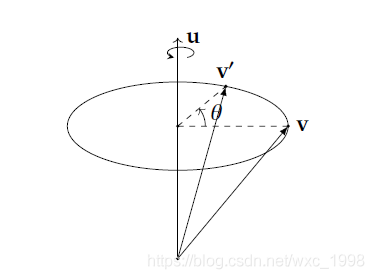
在轴角式变换方法中,一个旋转的定义需要四个变量,旋转轴的u的(x,y,z)方向,以及一个旋转角θ,也就是说有四个自由度。但是三维旋转本质上只有三个自由度,如欧拉角的方式。(多出来的自由度是因为我们在定义旋转轴u时,不仅定义了他的方向,还定义了他的长度,例如测绘/地理中我们使用经纬度两个量就可以找到地球上的任一方位,而再定义海拔则能够找到其具体的空间位置)为了减少长度这个自由度,可以转化一个单位向量:
旋转分解
对于要旋转的向量V,我们可以分解为平行于旋转轴u和垂直于旋转轴u的两个分量,如下所示:
写成下式所示:
而我们分别旋转上述两个分解向量,再进行组合,则得到旋转后的向量V’
可以从上述的示意图中看出,V‘||其实是V在u上的投影,根据正交投影公式:
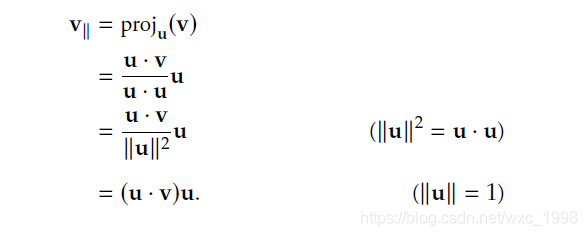
而且已知:
所以:
下面分别对V||与V⊥两个分量进行处理。
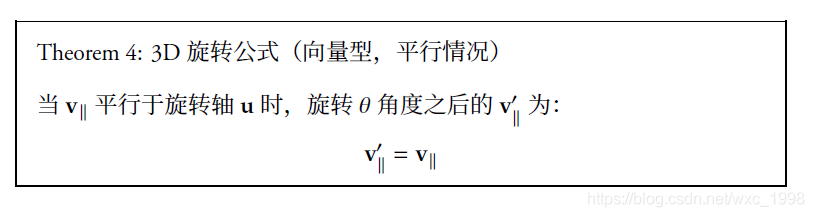
1)V||的旋转
首先,由于V||本身就是和旋转轴u是平行的,所以这种情况很简单,即旋转前后的变量没有发生改变,仍然与之前的旋转轴u重合。
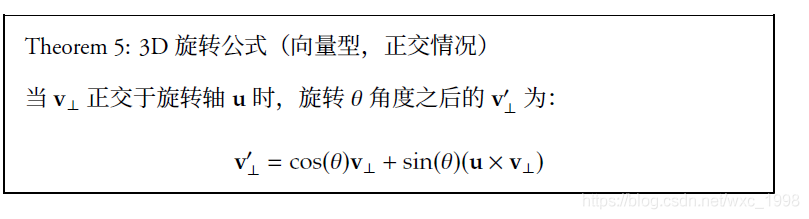
2)V⊥的旋转
正交于旋转轴u的分量V⊥旋转示意图如下所示:
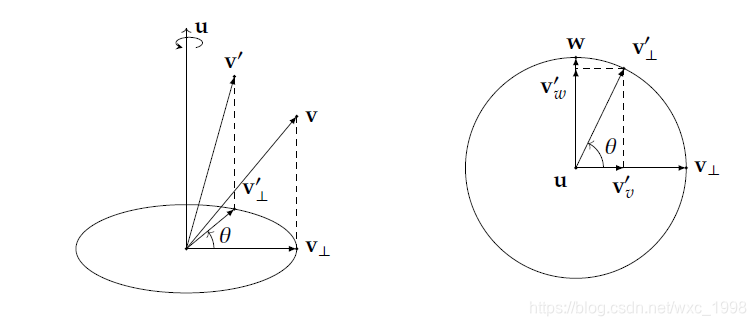
现在,我们就把三维上的旋转转换到了二维平面上,此外,我们再定义一个向量w同时正交于向量u和V⊥,这个w可以通过向量叉乘获得。
因为旋转轴u的模长为1,||u|| = 1,所以w的模长为:
这就表明w与V⊥的模长是相同的,位于同一个圆上。利用一些三角公式,我们可以把上图右侧中的V’⊥投影到v⊥和w两个方向上:
3)V的整体旋转
将上述1)V⊥2)V||的两个分量组合在一起就可以获得V的旋转V’。
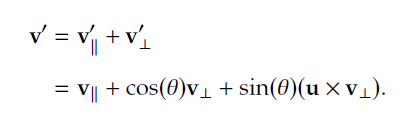
因为叉乘符合乘法分配律:
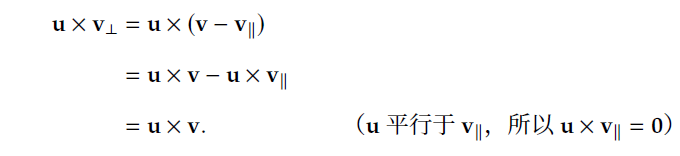
将V|| = (uv)u与V⊥ = v - (uv)u代入得:

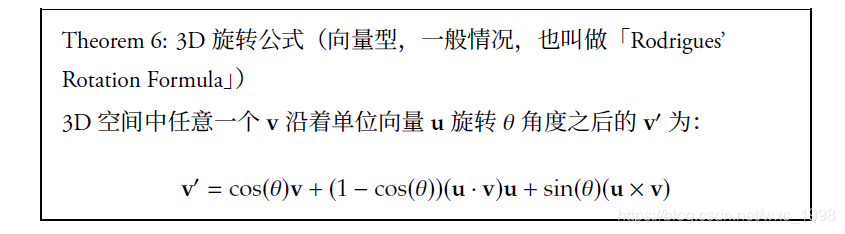
这样,我们就得到了一般形式的旋转公式: