单纯形法是求解线性规划问题的一种通用的有效算法(必考点)。
此篇博客以我的好友Cizeron总结为基础完成,特此表示感谢。

1.基本思想
单纯形法的基本思想是:给出一种规则,使由 LP问题一个基本可行解(极点)转移到另一个基本可行解,目标函数值是减小的,而且两个基本可行解之间的转换是容易实现的,经过有限次迭代,即可求得所需的最优基本可行解。
2.前置概念
(1)约束方程的规范形式:
线性规划(1)的约束条件系数矩阵A通过初等行变换,总可以化为
则约束条件可以写为
其中,显然
即为基,
为(1)的关于B基本解。将线性规划问题化为此规范形式是下文编程实现的第一步。
(2)基变换:
若初始基本可行解
不是最优解,那么就还要找一个新的基本可行解:从原可行基中换出一个列向量(离基变量),再换入一个新的列向量(进基变量)(要保证线性无关),从而得到一个新的可行基,这就是基变换。
3.算法步骤
Step1: (当然要先化为标准型)然后找到初始可行基B,解 ,求得 ,令 ,确定初始可行解。并计算初始目标函数值 其中 代表 对应的目标函数系数向量。
Step2: 求单纯形乘子 。对于所有非基变量,计算判别(检验)数 。令 { }, 是非基变量的下标集)若 ,则对于所有非基变量 ,而对于基变量的判别数总是零,因此停止计算,现行基本可行解是最优解。否则,进行下一步。
Step3: 解 ,得到 ,若 ,即 的每一个分量均为非正数,则停止计算:问题不存在有限最优解。否则,进行第四步。
Step4: 确定下标 { }。 为离基变量, 为进基变量。用 替换 ,得到新的矩阵B,返回第一步。
考试计算中,我们经常使用单纯形表完成上述计算。
不懂?
看栗子就完事了!

4.算例
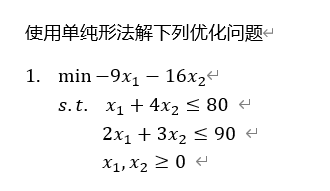
ONE: 化为标准型,并找到初始可行基B确定对应的基本可行解
标准型如下:
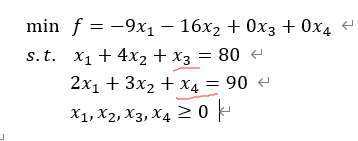
从标准型容易得到一个以 为基底的基本可行解: 非基变量的下标集 { }。
TWO:计算初始检验数
及目标函数值
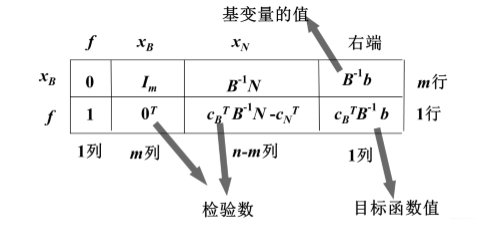
,建立初始单纯形表
计算检验数
和目标函数值
,建立如下图所示的单纯形表:
具体对于本题来说这里
,因此初始检验数为
,目标函数为
因此初始单纯形表如下:
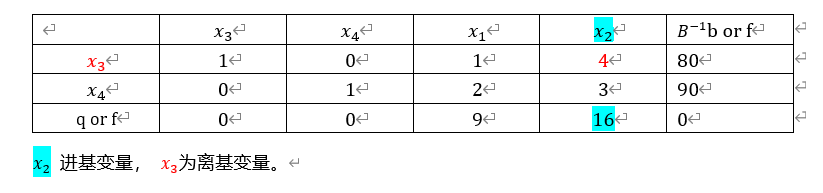
THREE:决定进基矢量
取最大检验数
所对应的变量作为进基矢(变)量,即
。
FOUR:决定离基矢量
和主元素
即单纯形表第i行的第j个变量对应列的对应元素,
即单纯形表最后一列(
)的第i行元素。
首先计算比值
,这里
。结果为:
故由
{
}。得
。因此主元素为
,离基变量为
。
FIVE:以
为主元素更新(进行Gauss消元)单纯形表
对单纯形表进行初等行变换使得主元素
所在位置变为1,且对应列的其他行都变为0。
对于本题将第一行除以4,然后分别乘以(-3)和(-16)加到第2、3行,完成第一次迭代,函数值减小为为-320。
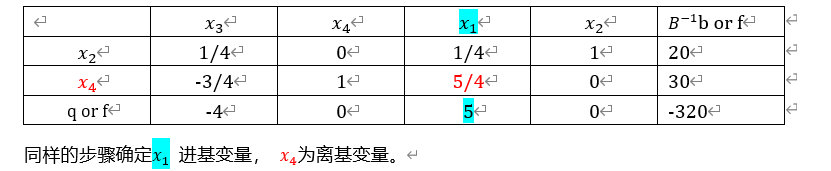
然后回到THREE进行下次迭代。
那么什么时候停止呢?下面来说

5.算法收敛性
以极小化问题为例,最大检验数
每次迭代必然出现下面三种情形:
(1)
:这时现行基本可行解就是最优解。
(2)
:当
无线增大时,目标函数趋于负无穷,因此解无解。
(3)
:这时求出的新的基本可行解,经迭代使目标函数下降。
收敛定理: 对于非退化问题(即存在非退化基本可行解),单纯形方法经有限次迭代后达到最优基本可行解,或得出无界的结论。
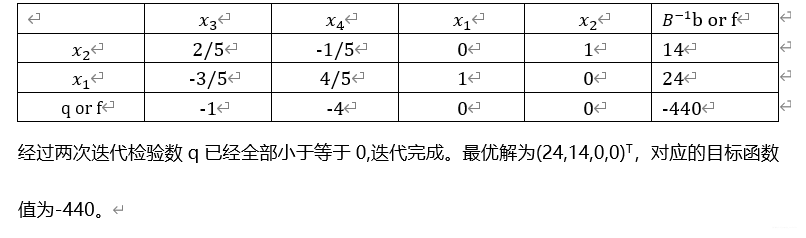
所以上面的那个例子在迭代了2次后最大检验数
,迭代停止,此时的解即为最优解。
6.Matlab实现
这里实现已经化为标准型且约束方程是规范形式。其实后面学习我们知道其他线性优化问题均可以通过M法或两阶段法转化至此。
通过上述算例的步骤一步一步实现即可,不算困难。大致可分四步:1.输入问题;2.建立初始单纯形表;3.迭代寻找最优解;4.输出结果。
因为这次期末时间过于紧张,这里先把代码总表给出,之后再按下面的步骤走一遍。

1.输入问题
2.建立初始单纯形表
3.迭代寻找最优解
4.输出结果
5.附录(代码总表)
% 输入一标准型,实现程序求求解
% 若有m个方程,则初始基本可行解为E,且位于最后mxm矩阵
% matlab代码
% Made by Fei
% 返回最优解(变量名和对应取值)和最优函数值
%c,A,b分别为目标函数系数向量,约束函数系数矩阵,约束函数右端常数
function [Y,T] = Mysolve(c,A,b)
% 预备工作
% 求出变量个数以及方程个数
n_numx = size(A,2);
n_eq = rank(A);
% 记录初始基本可行解及相应的变量所在位置
XB = b;
XB_index=[];
for i=1:n_eq
XB_index(i)=n_numx-n_eq+i;
end
% 求出单纯形乘子
cB = c(:,(n_numx-n_eq+1):n_numx);
w = cB;
% 求出初始函数值
f0 = cB*XB;
% 求出n_numx个检验数
z=[];
for i=1:n_numx
if(i>n_numx-n_eq)
z(i)=0;
else
temp = w*A(:,(n_numx-n_eq-i+1))-c(:,i);
z(i)=temp;
end
end
% 开始迭代求解
flag=0;
while(flag==0)
% 判断检验数是否全部全部为非正数,如是则停止迭代平输出结果
flag=1;
for i=1:n_numx
temp=z(i);
if(temp>0)
flag=0;
end
end
% 如果全负则输出结果
if(flag==1)
Y=[XB_index;XB']; % 变量名及所对应的取值
T=f0; % 最优目标函数值
break
end
%求解过程
% 找出最大检验数及并确定进基变量
Max=z(1);
index_in=1;
for i=2:n_numx
if(z(i)>Max)
Max=z(i);
index_in=i;
end
end
% 找出yr以及出基变量
y=b./A(:,index_in);
index_out_H=0;
for i=1:n_eq
if(y(i)<=0)
continue;
else
min=y(i);
% 分别记下对应的行以及出基变量
index_out_H=i;
index_out=XB_index(i);
break;
end
end
% 如果yi均为负数则无最优解,结束迭代
% 否则寻找yr及出基变量
if(index_out_H==0)
fprintf("该问题无最优值解");
break;
else
for i=index_out_H:n_eq
if(y(i)<min)
min=y(i);
index_out_H=i;
index_out=XB_index(i);
end
end
end
% 到这里我们已经找到了进基变量与出基变量的位置,及相应的y和检验数z
% 接下来我们尝试进行转轴运算更新单纯形表
b(index_out_H)=b(index_out_H)./A(index_out_H,index_in);
A(index_out_H,:)=A(index_out_H,:)./A(index_out_H,index_in);
% 更新A和B-1b
for i=1:n_eq
if(i==index_out_H)
continue;
else
temp=A(i,index_in);
A(i,:)=A(i,:)-temp.*A(index_out_H,:);
b(i)=b(i)-temp.*b(index_out_H);
end
end
% 更新检验数z和目标函数值f0
temp=z(index_in);
for i=1:n_numx
z(i)=z(i)-temp*A(index_out_H,i);
end
f0=f0-temp*b(index_out_H);
% 更新XB(基本可行解)以及对应的取值
for i=1:n_eq
if(XB_index(i)==index_out)
XB_index(i)=index_in;
else
continue;
end
end
XB=b;
end
以上文的例子输入演示结果:
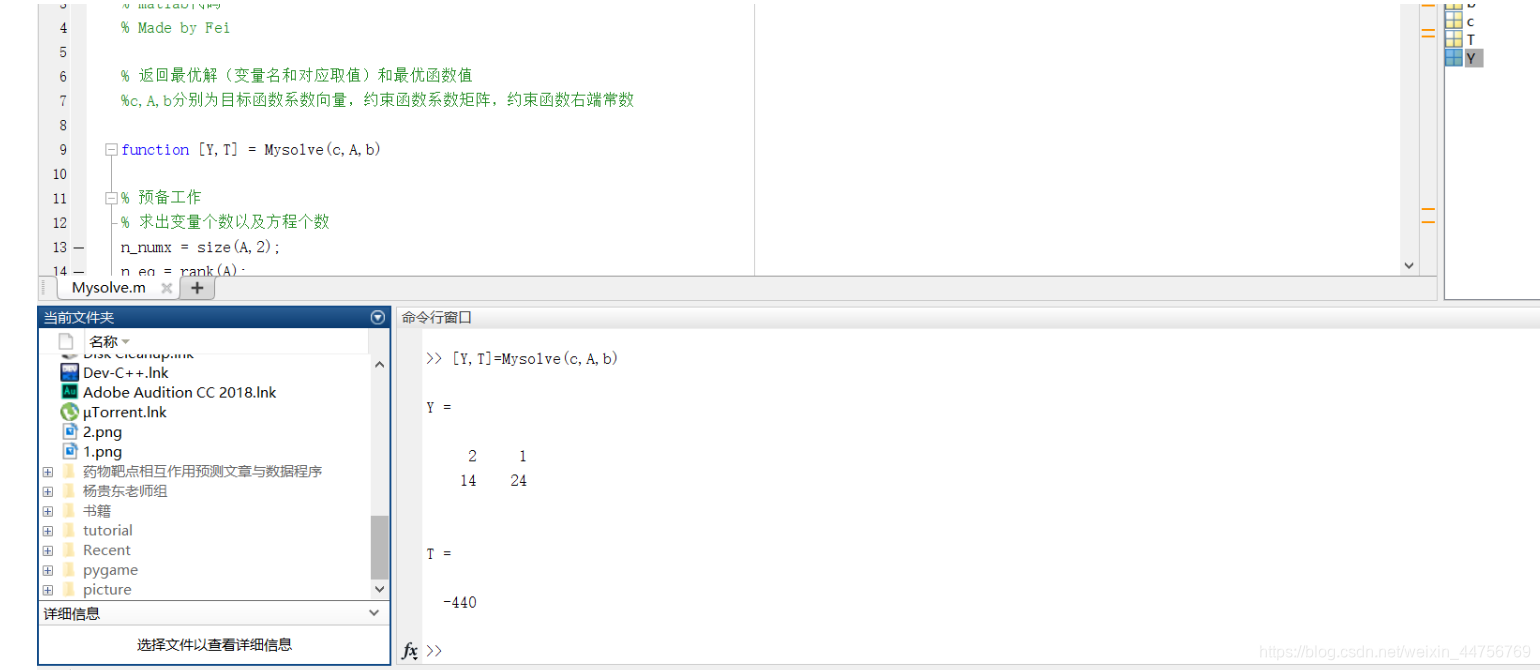
本节完。