以前一直在看和复现 cv 方向的论文,最近有需求所以去接触了一些 DL-EEG(深度学习-脑电图)的论文和模型,由于这一方向基本没有开源代码,所以从基础学起方便以后自己搭建模型;
而 GMM-HMM 是一个语音识别系统常用的的模型,对于 EEG 这样的时序数据也同样适用,所以今天就看一下 GMM-HMM 模型;
课件地址:
链接: https://pan.baidu.com/s/1T-oApPtrDADrdRr6-BsXtw
提取码: 5q8y
在马尔可夫性的定义中,在已知“现在”的条件下,“将来”与“过去”无关,这种特性就叫强马尔可夫性,具有这种性质的马尔可夫过程叫强马尔可夫过程;
在数学上定义为:
设
X
(
t
)
,
t
∈
T
X(t),t\in T
X ( t ) , t ∈ T
E
E
E
t
1
<
t
2
<
…
<
t
n
<
t
t_1<t_2<…<t_n<t
t 1 < t 2 < … < t n < t
x
1
,
x
2
,
…
,
x
n
,
x
∈
E
x_1,x_2,…,x_n,x\in E
x 1 , x 2 , … , x n , x ∈ E
X
(
t
)
X(t)
X ( t )
X
(
t
1
)
=
x
1
,
…
,
X
(
t
n
)
=
x
n
X(t_1)=x_1,…,X(t_n)=x_n
X ( t 1 ) = x 1 , … , X ( t n ) = x n
X
(
t
n
)
=
x
n
X(t_n)=x_n
X ( t n ) = x n
F
(
x
,
t
∣
x
n
,
x
n
−
1
,
…
,
x
2
,
x
1
,
t
n
,
t
n
−
1
,
…
,
t
2
,
t
1
)
=
F
(
x
,
t
∣
x
n
,
t
n
)
F(x,t|x_n,x_{n-1},…,x_2,x_1,t_n,t_{n-1},…,t_2,t_1)=F(x,t|x_n,t_n)
F ( x , t ∣ x n , x n − 1 , … , x 2 , x 1 , t n , t n − 1 , … , t 2 , t 1 ) = F ( x , t ∣ x n , t n )
即
P
{
X
(
t
)
≤
x
∣
X
(
t
1
)
=
x
1
,
…
,
X
(
t
n
)
=
x
n
}
=
P
{
X
(
t
)
≤
x
∣
X
(
t
n
)
=
x
n
}
P\lbrace X(t)\le x|X(t_1)=x_1,…,X(t_n)=x_n\rbrace=P\lbrace X(t)\le x|X(t_n)=x_n\rbrace
P { X ( t ) ≤ x ∣ X ( t 1 ) = x 1 , … , X ( t n ) = x n } = P { X ( t ) ≤ x ∣ X ( t n ) = x n }
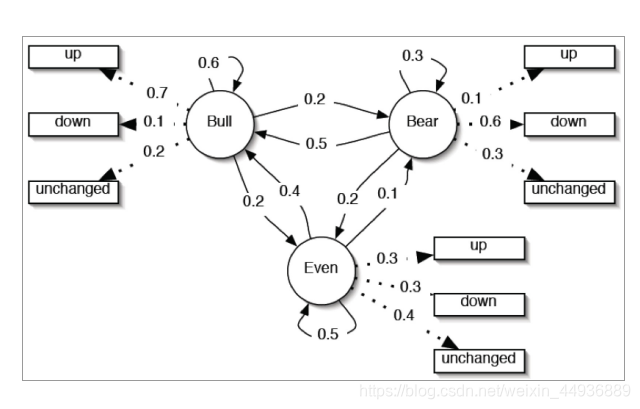
举一个简单的股票市场的例子(来自徐亦达老师,附上链接 https://github.com/roboticcam ):
t
t
t
y
t
∈
{
Y
1
,
Y
2
,
…
,
Y
L
}
y_t\in\lbrace Y_1,Y_2,…,Y_L\rbrace
y t ∈ { Y 1 , Y 2 , … , Y L }
L
L
L
L
L
L
L
=
3
L=3
L = 3
同时这个过程中也有一些隐藏的离散的状态量
q
t
∈
{
Q
1
,
Q
2
,
…
,
Q
K
}
q_t\in\lbrace Q_1,Q_2,…,Q_K\rbrace
q t ∈ { Q 1 , Q 2 , … , Q K }
K
K
K
K
K
K
K
=
3
K=3
K = 3
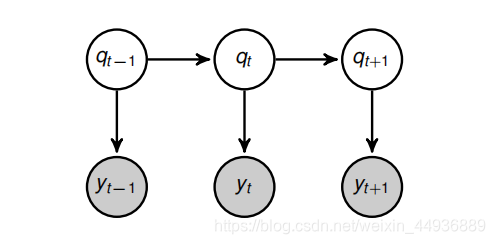
以下图的时序数据为例:
P
(
q
t
∣
q
1
,
.
.
.
,
q
t
−
1
,
y
1
,
.
.
.
,
y
t
−
1
)
=
P
(
q
t
∣
q
t
−
1
)
P(q_t|q_1, . . . , q_{t-1}, y_1, . . . , y_{t-1}) = P(q_t|q_{t-1})
P ( q t ∣ q 1 , . . . , q t − 1 , y 1 , . . . , y t − 1 ) = P ( q t ∣ q t − 1 )
P
(
y
t
∣
q
1
,
.
.
.
,
q
t
−
1
,
q
t
,
y
1
,
.
.
.
,
y
t
−
1
)
=
P
(
y
t
∣
q
t
)
P(y_t|q_1, . . . , q_{t-1},q_t, y_1, . . . , y_{t-1}) = P(y_t|q_{t})
P ( y t ∣ q 1 , . . . , q t − 1 , q t , y 1 , . . . , y t − 1 ) = P ( y t ∣ q t )
其中:
称
P
(
q
t
∣
q
t
−
1
)
P(q_t|q_{t-1})
P ( q t ∣ q t − 1 )
q
t
−
1
q_{t-1}
q t − 1
q
t
q_t
q t
称
P
(
y
t
∣
q
t
)
P(y_t|q_{t})
P ( y t ∣ q t )
q
t
q_{t}
q t
y
t
y_t
y t
为了方便计算,我们将这些概率记为矩阵的形式:
A
=
{
a
0
,
0
a
0
,
1
a
0
,
2
a
1
,
0
a
1
,
1
a
1
,
2
a
2
,
0
a
2
,
1
a
2
,
2
}
A= \left\{ \begin{matrix} a_{0,0} & a_{0,1} & a_{0,2}\\ a_{1,0} & a_{1,1} & a_{1,2}\\ a_{2,0} & a_{2,1} & a_{2,2}\\ \end{matrix} \right\}
A = ⎩ ⎨ ⎧ a 0 , 0 a 1 , 0 a 2 , 0 a 0 , 1 a 1 , 1 a 2 , 1 a 0 , 2 a 1 , 2 a 2 , 2 ⎭ ⎬ ⎫
B
=
{
b
0
,
0
b
0
,
1
b
0
,
2
b
1
,
0
b
1
,
1
b
1
,
2
b
2
,
0
b
2
,
1
b
2
,
2
}
B= \left\{ \begin{matrix} b_{0,0} & b_{0,1} & b_{0,2}\\ b_{1,0} & b_{1,1} & b_{1,2}\\ b_{2,0} & b_{2,1} & b_{2,2}\\ \end{matrix} \right\}
B = ⎩ ⎨ ⎧ b 0 , 0 b 1 , 0 b 2 , 0 b 0 , 1 b 1 , 1 b 2 , 1 b 0 , 2 b 1 , 2 b 2 , 2 ⎭ ⎬ ⎫
其中:
A
A
A
K
×
K
K×K
K × K
B
B
B
K
×
L
K×L
K × L
a
i
,
j
a_{i,j}
a i , j
Q
i
Q_i
Q i
Q
j
Q_j
Q j
b
i
,
j
b_{i,j}
b i , j
Q
i
Q_i
Q i
Y
j
Y_j
Y j
由第一张图我们可以分别写出这些概率,例如:
从隐状态 EVEN 到 BULL 的概率为 0.4,可以写作
P
(
q
t
=
B
U
L
L
∣
q
t
−
1
=
E
V
E
N
)
=
0.4
P(q_t=BULL|q_{t-1}=EVEN)=0.4
P ( q t = B U L L ∣ q t − 1 = E V E N ) = 0 . 4
a
3
,
1
=
0.4
a_{3,1}=0.4
a 3 , 1 = 0 . 4
在隐状态 BEAR 下观测到 DOWN 的概率为 0.6,可以写作
P
(
y
t
=
D
O
W
N
∣
q
t
=
B
E
A
R
)
=
0.6
P(y_t=DOWN|q_t=BEAR)=0.6
P ( y t = D O W N ∣ q t = B E A R ) = 0 . 6
b
2
,
2
=
0.6
b_{2,2}=0.6
b 2 , 2 = 0 . 6
为了方便书写,我们令:
q
t
∈
{
B
U
L
L
,
B
E
A
R
,
E
V
E
N
}
=
{
1
,
2
,
3
}
q_t\in\lbrace BULL,BEAR,EVEN\rbrace=\lbrace 1,2,3\rbrace
q t ∈ { B U L L , B E A R , E V E N } = { 1 , 2 , 3 }
y
t
∈
{
U
P
,
D
O
W
N
,
U
N
C
H
A
N
G
E
D
}
=
{
1
,
2
,
3
}
y_t\in\lbrace UP,DOWN,UNCHANGED\rbrace=\lbrace 1,2,3\rbrace
y t ∈ { U P , D O W N , U N C H A N G E D } = { 1 , 2 , 3 }
同时我们可以分别写出
A
A
A
B
B
B
A
=
{
0.6
0.2
0.2
0.5
0.3
0.2
0.4
0.5
0.1
}
A= \left\{ \begin{matrix} 0.6 & 0.2 & 0.2\\ 0.5 & 0.3 & 0.2\\ 0.4 & 0.5 & 0.1\\ \end{matrix} \right\}
A = ⎩ ⎨ ⎧ 0 . 6 0 . 5 0 . 4 0 . 2 0 . 3 0 . 5 0 . 2 0 . 2 0 . 1 ⎭ ⎬ ⎫
B
=
{
0.7
0.1
0.2
0.1
0.6
0.3
0.3
0.3
0.4
}
B= \left\{ \begin{matrix} 0.7 & 0.1 & 0.2\\ 0.1 & 0.6 & 0.3\\ 0.3 & 0.3 & 0.4\\ \end{matrix} \right\}
B = ⎩ ⎨ ⎧ 0 . 7 0 . 1 0 . 3 0 . 1 0 . 6 0 . 3 0 . 2 0 . 3 0 . 4 ⎭ ⎬ ⎫
并且我们记
λ
=
{
A
,
B
}
\lambda=\lbrace A,B\rbrace
λ = { A , B }
q
t
−
1
→
q
t
→
q
t
+
1
q_{t-1}\rightarrow q_{t}\rightarrow q_{t+1}
q t − 1 → q t → q t + 1
那么就有:
P
(
y
t
+
1
,
y
t
,
.
.
.
,
y
1
)
=
∑
q
t
+
1
=
1
K
∑
q
t
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
t
+
1
,
y
t
,
.
.
.
,
y
1
,
q
t
+
1
,
q
t
,
.
.
.
,
q
1
)
=
∑
q
t
+
1
=
1
K
∑
q
t
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
t
+
1
∣
y
t
,
y
t
−
1
,
q
t
+
1
,
q
t
,
q
t
−
1
)
×
P
(
y
t
,
y
t
−
1
,
q
t
+
1
,
q
t
,
q
t
−
1
)
\begin{aligned} P(y_{t+1},y_t,...,y_{1}) & =\sum_{q_{t+1}=1}^K\sum_{q_{t}=1}^K...\sum_{q_{1}=1}^KP(y_{t+1},y_t,...,y_{1},q_{t+1},q_t,...,q_{1}) \\ & =\sum_{q_{t+1}=1}^K\sum_{q_{t}=1}^K...\sum_{q_{1}=1}^KP(y_{t+1}|y_t,y_{t-1},q_{t+1},q_t,q_{t-1})×P(y_t,y_{t-1},q_{t+1},q_t,q_{t-1}) \\ \end{aligned}
P ( y t + 1 , y t , . . . , y 1 ) = q t + 1 = 1 ∑ K q t = 1 ∑ K . . . q 1 = 1 ∑ K P ( y t + 1 , y t , . . . , y 1 , q t + 1 , q t , . . . , q 1 ) = q t + 1 = 1 ∑ K q t = 1 ∑ K . . . q 1 = 1 ∑ K P ( y t + 1 ∣ y t , y t − 1 , q t + 1 , q t , q t − 1 ) × P ( y t , y t − 1 , q t + 1 , q t , q t − 1 )
P
(
y
t
+
1
,
y
t
,
.
.
.
,
y
1
)
=
∑
q
t
+
1
=
1
K
∑
q
t
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
t
+
1
∣
q
t
+
1
)
×
P
(
y
t
,
y
t
−
1
,
q
t
+
1
,
q
t
,
q
t
−
1
)
\begin{aligned} P(y_{t+1},y_t,...,y_{1}) & =\sum_{q_{t+1}=1}^K\sum_{q_{t}=1}^K...\sum_{q_{1}=1}^KP(y_{t+1}|q_{t+1})×P(y_t,y_{t-1},q_{t+1},q_t,q_{t-1}) \\ \end{aligned}
P ( y t + 1 , y t , . . . , y 1 ) = q t + 1 = 1 ∑ K q t = 1 ∑ K . . . q 1 = 1 ∑ K P ( y t + 1 ∣ q t + 1 ) × P ( y t , y t − 1 , q t + 1 , q t , q t − 1 )
同样可以继续化简为:
P
(
y
t
+
1
,
y
t
,
.
.
.
,
y
1
)
=
∑
q
t
+
1
=
1
K
∑
q
t
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
t
+
1
∣
q
t
+
1
)
×
P
(
q
t
+
1
∣
y
t
,
y
t
−
1
,
q
t
,
q
t
−
1
)
×
P
(
y
t
,
y
t
−
1
,
q
t
,
q
t
−
1
)
=
∑
q
t
+
1
=
1
K
∑
q
t
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
t
+
1
∣
q
t
+
1
)
×
P
(
q
t
+
1
∣
q
t
)
×
P
(
y
t
,
y
t
−
1
,
q
t
,
q
t
−
1
)
=
.
.
.
(
注
意
到
这
是
递
归
式
)
=
∑
q
t
+
1
=
1
K
∑
q
t
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
t
+
1
∣
q
t
+
1
)
×
P
(
q
t
+
1
∣
q
t
)
×
.
.
.
×
P
(
y
1
∣
q
1
)
×
P
(
q
1
)
\begin{aligned} P(y_{t+1},y_t,...,y_{1})& =\sum_{q_{t+1}=1}^K\sum_{q_{t}=1}^K...\sum_{q_{1}=1}^KP(y_{t+1}|q_{t+1})×P(q_{t+1}|y_t,y_{t-1},q_t,q_{t-1})×P(y_t,y_{t-1},q_t,q_{t-1}) \\ & =\sum_{q_{t+1}=1}^K\sum_{q_{t}=1}^K...\sum_{q_{1}=1}^KP(y_{t+1}|q_{t+1})×P(q_{t+1}|q_t)×P(y_t,y_{t-1},q_t,q_{t-1}) \\ &=...(注意到这是递归式)\\ & =\sum_{q_{t+1}=1}^K\sum_{q_{t}=1}^K...\sum_{q_{1}=1}^KP(y_{t+1}|q_{t+1})×P(q_{t+1}|q_t)×...×P(y_{1}|q_{1})×P(q_1) \\ \end{aligned}
P ( y t + 1 , y t , . . . , y 1 ) = q t + 1 = 1 ∑ K q t = 1 ∑ K . . . q 1 = 1 ∑ K P ( y t + 1 ∣ q t + 1 ) × P ( q t + 1 ∣ y t , y t − 1 , q t , q t − 1 ) × P ( y t , y t − 1 , q t , q t − 1 ) = q t + 1 = 1 ∑ K q t = 1 ∑ K . . . q 1 = 1 ∑ K P ( y t + 1 ∣ q t + 1 ) × P ( q t + 1 ∣ q t ) × P ( y t , y t − 1 , q t , q t − 1 ) = . . . ( 注 意 到 这 是 递 归 式 ) = q t + 1 = 1 ∑ K q t = 1 ∑ K . . . q 1 = 1 ∑ K P ( y t + 1 ∣ q t + 1 ) × P ( q t + 1 ∣ q t ) × . . . × P ( y 1 ∣ q 1 ) × P ( q 1 )
当然我们还可以注意到,式子中有一项
P
(
q
1
)
P(q_1)
P ( q 1 )
π
\pi
π
λ
=
{
A
,
B
,
π
}
\lambda=\lbrace A,B,\pi\rbrace
λ = { A , B , π }
那么在参数
λ
\lambda
λ
P
(
y
t
+
1
,
y
t
,
.
.
.
,
y
1
∣
λ
)
=
∑
q
t
+
1
=
1
K
∑
q
t
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
t
+
1
∣
q
t
+
1
)
×
P
(
q
t
+
1
∣
q
t
)
×
.
.
.
×
P
(
y
1
∣
q
1
)
×
P
(
q
1
)
\begin{aligned} P(y_{t+1},y_t,...,y_{1}|\lambda)& =\sum_{q_{t+1}=1}^K\sum_{q_{t}=1}^K...\sum_{q_{1}=1}^KP(y_{t+1}|q_{t+1})×P(q_{t+1}|q_t)×...×P(y_{1}|q_{1})×P(q_1)\\ \end{aligned}
P ( y t + 1 , y t , . . . , y 1 ∣ λ ) = q t + 1 = 1 ∑ K q t = 1 ∑ K . . . q 1 = 1 ∑ K P ( y t + 1 ∣ q t + 1 ) × P ( q t + 1 ∣ q t ) × . . . × P ( y 1 ∣ q 1 ) × P ( q 1 )
更具体一点,对于一组观测值
Y
T
=
{
y
1
,
y
2
,
.
.
.
,
y
T
}
Y_T=\lbrace y_1,y_2,...,y_T\rbrace
Y T = { y 1 , y 2 , . . . , y T }
P
(
y
T
,
y
T
−
1
,
.
.
.
,
y
1
∣
λ
)
=
∑
q
T
=
1
K
∑
q
T
−
1
=
1
K
.
.
.
∑
q
1
=
1
K
P
(
y
T
∣
q
T
)
×
P
(
q
T
∣
q
T
−
1
)
×
.
.
.
×
P
(
y
1
∣
q
1
)
×
P
(
q
1
)
=
∑
q
T
=
1
K
∑
q
T
−
1
=
1
K
.
.
.
∑
q
1
=
1
K
π
(
q
1
)
∏
t
=
2
T
a
q
t
−
1
,
q
t
b
q
t
(
y
t
)
\begin{aligned} P(y_{T},y_{T-1},...,y_{1}|\lambda)&=\sum_{q_{T}=1}^K\sum_{q_{T-1}=1}^K...\sum_{q_{1}=1}^KP(y_{T}|q_{T})×P(q_{T}|q_{T-1})×...×P(y_{1}|q_{1})×P(q_1)\\ & =\sum_{q_{T}=1}^K\sum_{q_{T-1}=1}^K...\sum_{q_{1}=1}^K\pi(q_1)\prod_{t=2}^{T}a_{q_{t-1},q_{t}}b_{q_{t}}(y_t)\\ \end{aligned}
P ( y T , y T − 1 , . . . , y 1 ∣ λ ) = q T = 1 ∑ K q T − 1 = 1 ∑ K . . . q 1 = 1 ∑ K P ( y T ∣ q T ) × P ( q T ∣ q T − 1 ) × . . . × P ( y 1 ∣ q 1 ) × P ( q 1 ) = q T = 1 ∑ K q T − 1 = 1 ∑ K . . . q 1 = 1 ∑ K π ( q 1 ) t = 2 ∏ T a q t − 1 , q t b q t ( y t )
虽然我们得到了上述式子,但是存在的问题就是它的计算复杂度较高,对于长度为
T
T
T
K
T
K^T
K T
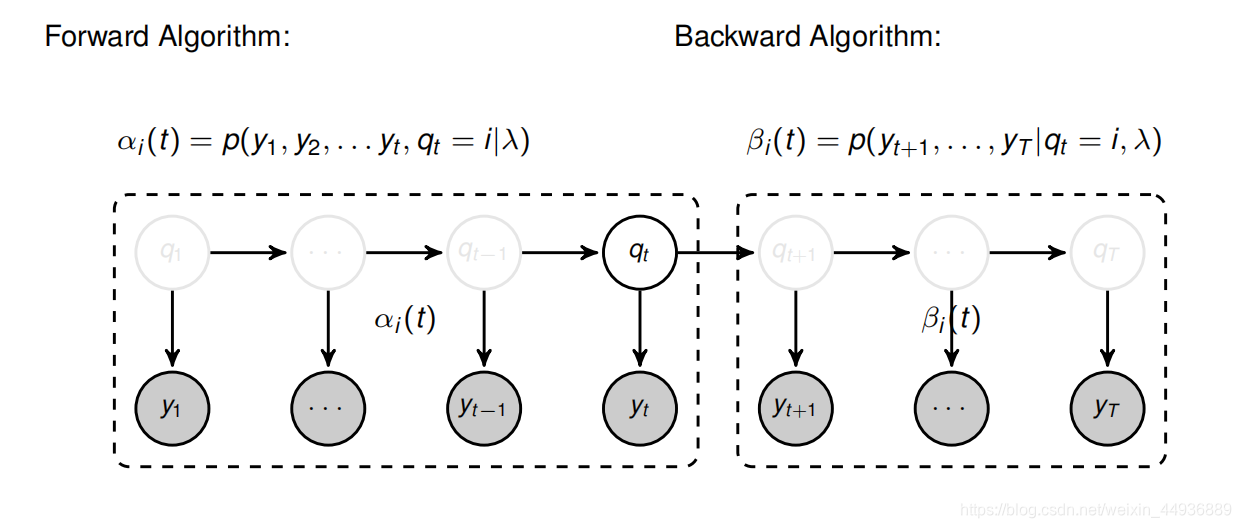
为了简化推理式,我们首先定义如下概念:
定义一:
α
i
(
t
)
=
P
(
y
1
,
y
2
,
.
.
.
,
y
t
,
q
t
=
i
∣
λ
)
\alpha_i(t)=P(y_1,y_2,...,y_t,q_t=i|\lambda)
α i ( t ) = P ( y 1 , y 2 , . . . , y t , q t = i ∣ λ )
q
t
=
i
q_t=i
q t = i
y
1
,
y
2
,
.
.
.
,
y
t
y_1,y_2,...,y_t
y 1 , y 2 , . . . , y t
定义二:
β
i
(
t
)
=
P
(
y
t
+
1
,
.
.
.
,
y
T
∣
q
t
=
i
,
λ
)
\beta_i(t)=P(y_{t+1},...,y_{T}|q_t=i,\lambda)
β i ( t ) = P ( y t + 1 , . . . , y T ∣ q t = i , λ )
q
t
=
i
q_t=i
q t = i
y
t
+
1
,
.
.
.
,
t
T
y_{t+1},...,t_T
y t + 1 , . . . , t T
那么我们可以写出:
(1)
α
i
(
1
)
=
P
(
y
1
,
q
1
=
i
)
=
P
(
y
1
∣
q
1
=
i
)
×
P
(
q
1
=
i
)
=
b
i
(
y
1
)
×
π
\begin{aligned} \alpha_i(1)&=P(y_1,q_1=i)\\ &=P(y_1|q_1=i)×P(q_1=i)\\ &=b_i(y_1)×\pi \end{aligned}
α i ( 1 ) = P ( y 1 , q 1 = i ) = P ( y 1 ∣ q 1 = i ) × P ( q 1 = i ) = b i ( y 1 ) × π
(2)
α
j
(
2
)
=
P
(
y
1
,
y
2
,
q
2
=
j
)
=
∑
i
=
1
K
P
(
y
1
,
y
2
,
q
1
=
i
,
q
2
=
j
)
=
∑
i
=
1
K
P
(
y
2
∣
q
2
=
j
)
×
P
(
q
2
=
j
∣
q
1
=
j
)
×
P
(
y
1
,
q
1
=
i
)
=
P
(
y
2
∣
q
2
=
j
)
∑
i
=
1
K
P
(
q
2
=
j
∣
q
1
=
i
)
×
α
i
(
1
)
=
b
j
(
y
2
)
∑
i
=
1
K
a
i
,
j
α
i
(
1
)
\begin{aligned} \alpha_j(2)&=P(y_1,y_2,q_2=j)\\ &=\sum_{i=1}^K P(y_1,y_2,q_1=i,q_2=j)\\ &=\sum_{i=1}^K P(y_2|q_2=j)×P(q2=j|q_1=j)×P(y_1,q_1=i)\\ &=P(y_2|q_2=j)\sum_{i=1}^KP(q_2=j|q_1=i)×\alpha_i(1)\\ &=b_j(y_2)\sum_{i=1}^Ka_{i,j}\alpha_i(1) \end{aligned}
α j ( 2 ) = P ( y 1 , y 2 , q 2 = j ) = i = 1 ∑ K P ( y 1 , y 2 , q 1 = i , q 2 = j ) = i = 1 ∑ K P ( y 2 ∣ q 2 = j ) × P ( q 2 = j ∣ q 1 = j ) × P ( y 1 , q 1 = i ) = P ( y 2 ∣ q 2 = j ) i = 1 ∑ K P ( q 2 = j ∣ q 1 = i ) × α i ( 1 ) = b j ( y 2 ) i = 1 ∑ K a i , j α i ( 1 )
.
.
.
.
.
.
......
. . . . . .
以此类推,我们就可以得到:
α
j
(
T
)
=
b
j
(
y
T
)
∑
i
=
1
K
a
i
,
j
α
i
(
T
−
1
)
\begin{aligned} \alpha_j(T)=b_j(y_T)\sum^K_{i=1}a_{i,j}\alpha_i(T-1) \end{aligned}
α j ( T ) = b j ( y T ) i = 1 ∑ K a i , j α i ( T − 1 )
这样的递推关系中,由于每个
α
(
t
)
\alpha(t)
α ( t )
s
u
m
sum
s u m
K
×
T
K×T
K × T
此时我们再看一下定义一:
α
i
(
t
)
=
P
(
y
1
,
y
2
,
.
.
.
,
y
t
,
q
t
=
i
∣
λ
)
\alpha_i(t)=P(y_1,y_2,...,y_t,q_t=i|\lambda)
α i ( t ) = P ( y 1 , y 2 , . . . , y t , q t = i ∣ λ )
我们可以写出:
P
(
y
T
,
y
T
−
1
,
.
.
.
,
y
1
∣
λ
)
=
∑
j
=
1
K
α
j
(
T
)
P(y_{T},y_{T-1},...,y_{1}|\lambda)=\sum_{j=1}^K\alpha_j(T)
P ( y T , y T − 1 , . . . , y 1 ∣ λ ) = j = 1 ∑ K α j ( T )
这种算法就叫做 Forward Algorithm;
还有一种对应的算法 Backward Algorithm,可以在已知全部序列时算出所有事件的概率,即:
P
(
Y
,
q
t
=
i
)
=
P
(
Y
∣
q
t
=
i
)
×
P
(
q
t
=
i
)
=
P
(
y
1
,
.
.
.
,
y
t
∣
q
t
=
i
)
×
P
(
y
t
+
1
,
.
.
.
,
y
T
∣
q
t
=
i
)
×
P
(
q
t
=
i
)
=
α
i
(
t
)
×
β
i
(
t
)
\begin{aligned} P(Y,q_t=i)&=P(Y|q_t=i)×P(q_t=i)\\ &=P(y_1,...,y_t|q_t=i)×P(y_{t+1},...,y_T|q_t=i)×P(q_t=i)\\ &=\alpha_i(t)×\beta_i(t) \end{aligned}
P ( Y , q t = i ) = P ( Y ∣ q t = i ) × P ( q t = i ) = P ( y 1 , . . . , y t ∣ q t = i ) × P ( y t + 1 , . . . , y T ∣ q t = i ) × P ( q t = i ) = α i ( t ) × β i ( t )
参数值可以通过最大似然估计获取,即对于给定的
n
n
n
Y
N
=
{
Y
1
,
Y
2
,
.
.
.
,
Y
N
}
Y_N=\lbrace Y^{1},Y^{2},...,Y^{N}\rbrace
Y N = { Y 1 , Y 2 , . . . , Y N }
λ
\lambda
λ
λ
^
=
arg max
λ
l
o
g
P
(
Y
1
,
Y
2
,
.
.
.
,
Y
n
∣
λ
)
\hat{\lambda}=\argmax_{\lambda}logP(Y^{1},Y^{2},...,Y^{n}|\lambda)
λ ^ = λ a r g m a x l o g P ( Y 1 , Y 2 , . . . , Y n ∣ λ )
通常这个估计方程的解会非常复杂,因此我们采用 EM 算法去估计参数值,EM 算法的详细解释和收敛性证明可以看我的这一篇:
【机器学习基础】EM算法详解及其收敛性证明
这里直接给出迭代步骤:
我们先假设隐藏参数
ε
t
(
i
,
j
)
=
P
(
q
t
=
i
,
q
t
+
1
∣
Y
,
λ
)
\varepsilon_t(i,j)=P(q_t=i,q_{t+1}|Y,\lambda)
ε t ( i , j ) = P ( q t = i , q t + 1 ∣ Y , λ )
λ
\lambda
λ
Y
∈
Y
N
Y\in Y_N
Y ∈ Y N
Y
=
{
y
1
,
.
.
.
,
y
n
}
Y=\lbrace y_1,...,y_n\rbrace
Y = { y 1 , . . . , y n }
t
t
t
i
i
i
t
+
1
t+1
t + 1
j
j
j
展开为:
ε
t
(
i
,
j
)
=
P
(
q
t
=
i
,
q
t
+
1
=
j
,
Y
∣
λ
)
P
(
Y
∣
λ
)
=
α
t
(
i
)
a
i
,
j
b
j
(
y
t
+
1
)
β
t
+
1
(
j
)
P
(
Y
N
∣
λ
)
=
α
t
(
i
)
a
i
,
j
b
j
(
y
t
+
1
)
β
t
+
1
(
j
)
∑
i
=
1
K
∑
j
=
1
K
α
t
(
i
)
a
i
,
j
b
j
(
y
t
+
1
)
β
t
+
1
(
j
)
\begin{aligned} \varepsilon_t(i,j)&=\frac{P(q_t=i,q_{t+1}=j,Y|\lambda)}{P(Y|\lambda)} \\ &=\frac{\alpha_t(i)a_{i,j}b_j(y_{t+1})\beta_{t+1}(j)}{P(Y_N|\lambda)}\\ &=\frac{\alpha_t(i)a_{i,j}b_j(y_{t+1})\beta_{t+1}(j)}{\sum_{i=1}^K\sum_{j=1}^K\alpha_t(i)a_{i,j}b_j(y_{t+1})\beta_{t+1}(j)}\\ \end{aligned}
ε t ( i , j ) = P ( Y ∣ λ ) P ( q t = i , q t + 1 = j , Y ∣ λ ) = P ( Y N ∣ λ ) α t ( i ) a i , j b j ( y t + 1 ) β t + 1 ( j ) = ∑ i = 1 K ∑ j = 1 K α t ( i ) a i , j b j ( y t + 1 ) β t + 1 ( j ) α t ( i ) a i , j b j ( y t + 1 ) β t + 1 ( j )
并定义参数
γ
t
(
i
)
=
∑
i
=
1
n
ε
t
(
i
,
j
)
,
1
≤
t
≤
T
\gamma_t(i)=\sum_{i=1}^n\varepsilon_t(i,j),1\le t\le T
γ t ( i ) = ∑ i = 1 n ε t ( i , j ) , 1 ≤ t ≤ T
λ
\lambda
λ
Y
Y
Y
t
t
t
i
i
i
那么将
t
t
t
i
i
i
ε
t
(
i
,
j
)
\varepsilon_t(i,j)
ε t ( i , j )
i
i
i
j
j
j
γ
t
(
i
)
\gamma_t(i)
γ t ( i )
因此就可以得到参数
λ
\lambda
λ
π
i
^
=
γ
1
(
i
)
\hat{\pi_i}=\gamma_1(i)
π i ^ = γ 1 ( i )
a
^
i
,
j
=
∑
t
=
1
T
−
1
ε
t
(
i
,
j
)
∑
t
=
1
T
−
1
γ
t
(
i
)
\hat{a}_{i,j}=\frac{\sum_{t=1}^{T-1}\varepsilon_t(i,j)}{\sum_{t=1}^{T-1}\gamma_t(i)}
a ^ i , j = ∑ t = 1 T − 1 γ t ( i ) ∑ t = 1 T − 1 ε t ( i , j )
b
^
j
(
k
)
=
∑
t
=
1
T
γ
t
(
j
)
δ
(
y
t
,
k
)
∑
t
=
1
T
γ
t
(
j
)
\hat{b}_j(k)=\frac{\sum_{t=1}^{T}\gamma_t(j)\delta(y_t,k)}{\sum_{t=1}^{T}\gamma_t(j)}
b ^ j ( k ) = ∑ t = 1 T γ t ( j ) ∑ t = 1 T γ t ( j ) δ ( y t , k )
其中:
δ
(
x
,
k
)
=
{
1
x=k
0
x!=k
\delta(x,k)= \begin{cases} 1& \text{x=k}\\ 0& \text{x!=k} \end{cases}
δ ( x , k ) = { 1 0 x=k x!=k
迭代过程为:
初始化参数
λ
=
{
A
,
B
,
π
}
\lambda=\lbrace A,B,\pi\rbrace
λ = { A , B , π }
E-Step:由参数估计值
λ
i
\lambda_i
λ i
ε
t
(
i
,
j
)
\varepsilon_t(i,j)
ε t ( i , j )
γ
t
(
i
)
\gamma_t(i)
γ t ( i )
M-Step:用期望
ε
t
(
i
,
j
)
\varepsilon_t(i,j)
ε t ( i , j )
γ
t
(
i
)
\gamma_t(i)
γ t ( i )
λ
i
+
1
\lambda_{i+1}
λ i + 1
其中:
E-step 和 M-Step 循环迭代,直到参数
λ
\lambda
λ